1.本实用新型涉及育婴箱调节技术领域,尤其涉及一种床体找平装置及育婴箱。
背景技术:
2.目前市场上的育婴箱基本都是采用电推杆或者手动机械调节的方式来控制育婴箱内部床体的倾斜程度,且没有独立的水平操作功能,也即不能自动找平,都是通过上倾斜或者下倾斜的反向操作配合角度传感器或者推杆内置位移传感器甚至依靠人眼判断床体是否处于水平位置,主要存在以下几个问题:
3.1、采用手动机械调节的方式依靠人眼或者凭直觉判断床体的位置是向上向下倾斜还是处于水平位置,又慢又费力,有的会有水平位置的卡点,但是这样就会使床体有震动感,不利于婴儿的休息;
4.2、采用电推杆方式的,
①
如果推杆内部没有加位移传感器或者外部没使用角度传感器,也只能依靠人眼直觉判断水平的位置;
②
如果推杆内部增加位移传感器,不仅增加推杆的成本,而且随着推杆来来回回的工作次数增加后,误差也不断累计上来,不适合长期使用;
③
如果在外部增加角度传感器,除了成本上涨较大,对结构上的要求也极高,需要找准安装位置,模型会更复杂,增加开模成本,又占据较大空间,这使得本身空间不怎么富余的箱体更难设计。因此,尚未存在一种实现简单、操作简易、成本低廉、精度较高的床体找平装置。
技术实现要素:
5.本实用新型的主要目的在于提供一种床体找平装置及育婴箱,可以解决现有技术中的缺少一种实现简单、操作简易、成本低廉,且找平精度较高的床体找平装置的问题。
6.为实现上述目的,本实用新型第一方面提供一种床体找平装置,所述床体找平装置包括:
7.光电检测装置、电推杆驱动装置及主控装置;所述主控装置分别与所述光电检测装置及所述电推杆驱动装置电连接;所述电推杆驱动装置用于驱动电推杆,所述电推杆上设置有非反光标记区,所述非反光标记区用于标志所述床体水平的水平位置;
8.所述光电检测装置用于输出感光信号,所述感光信号包括检测到所述非反光标记区的非反光信号或未检测到所述非反光标记区的反光信号;
9.所述主控装置用于接收所述感光信号,且输出控制信号,所述控制信号用于指示对所述电推杆的控制方式;
10.所述电推杆驱动装置还用于接收所述控制信号,并驱动所述电推杆。
11.为实现上述目的,本实用新型第二方面提供一种育婴箱,所述育婴箱包括第一方面所述床体找平装置、床体及电推杆,所述电推杆上设置有非反光标记区。
12.采用本实用新型实施例,具有如下有益效果:
13.本实用新型实施例公开了一种床体找平装置,该床体找平装置包括:光电检测装
置、电推杆驱动装置及主控装置;主控装置分别与光电检测装置及电推杆驱动装置电连接;电推杆驱动装置用于驱动电推杆,电推杆上设置有非反光标记区,非反光标记区用于标志床体水平的水平位置;光电检测装置用于输出感光信号,感光信号包括检测到非反光标记区的非反光信号或未检测到非反光标记区的反光信号;主控装置用于接收感光信号,且输出控制信号,控制信号用于指示对电推杆的控制方式;电推杆驱动装置还用于接收控制信号,并驱动电推杆。通过光电检测装置以及在电推杆上设置一个标志床体水平位置的非反光标记区,便可以利用光电检测装置在检测到该非反光标记区的非反光信号时,实现床体找平,使得床体找平实现简单、操作简易、成本低廉且精度较高。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.其中:
16.图1为本实用新型实施例中一种床体找平装置的结构框图;
17.图2为本实用新型实施例中一种床体找平装置的另一结构框图;
18.图3为本实用新型实施例中一种主控装置的电路连接示意图;
19.图4(1)以及图4(2)为本实用新型实施例中一种光电检测装置的电路连接示意图;
20.图5为本实用新型实施例中一种按键单元的电路连接示意图;
21.图6至图7为本实用新型实施例中一种继电器控制单元的电路连接示意图;
22.图8为本实用新型实施例中一种运行提示单元的电路连接示意图;
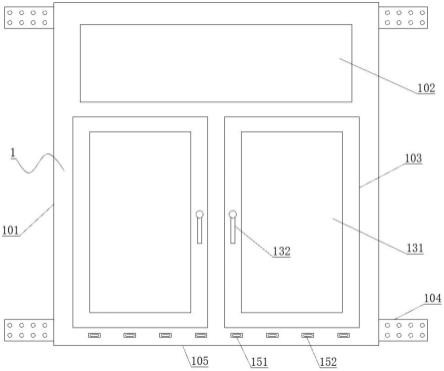
23.图9为本实用新型实施例中一种育婴箱的结构示意图。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
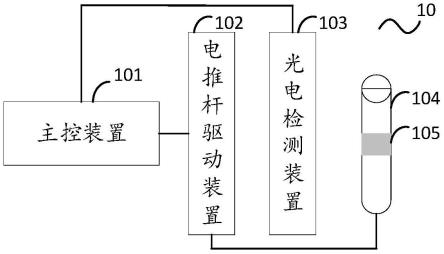
25.请参阅图1,图1为本实用新型实施例中一种床体找平装置的结构框图,如图1所示的床体找平装置10,具体可以包括:
26.主控装置101、电推杆驱动装置102及光电检测装置103;主控装置分别与光电检测装置及电推杆驱动装置电连接;电推杆驱动装置用于驱动电推杆104,电推杆上设置有非反光标记区105,非反光标记区用于标志床体水平的水平位置。其中,非反光标记区的实现,只需要增加一道简单的工序,对电推杆进行加工,在厂家制作电推杆时可顺带在推杆伸缩轴的固定位置上镭射或者喷射或者用其他方式给主轴增加一个非反光小环,这个位置前期结构上需要保证尺寸准确,该非反光环在床体处于正水平位置时,光电检测装置刚好与该非反光标记区正对,也即在床体处于正水平位置时,光电检测装置的探测位置正好为该非反光标记区,主控装置包括但不限于单片机等控制器。
27.需要说明的是,光电检测装置用于输出感光信号,感光信号包括检测到非反光标记区的非反光信号或未检测到非反光标记区的反光信号。其中,光电检测装置可以为包括光电传感器的光电检测装置。非反光信号为光电检测装置检测到非反光标记区时输出感光信号,该非反光信号可以为高电平信号,反光信号为光电检测装置未检测到非反光标记区时输出感光信号,该反光信号可以为低电平信号。
28.主控装置用于接收感光信号,且输出控制信号,控制信号用于指示对电推杆的控制方式。电推杆驱动装置还用于接收控制信号,并驱动电推杆。其中,控制方式包括但不限于电推杆伸出或电推杆收缩。根据用户不同的床体倾斜需求会实现不同的控制方式,比如床体向上倾斜、床体向下倾斜及床体水平,而在用需要床体水平时,主控装置会输出对应的找平控制信号,且通过接收到感光信号为非反光信号时,停止电推杆的运动,实现床体一键水平的功能。
29.示例性的,以光电检测装置为光电传感器为例,工作原理具体如下:运用光电传感器检测电推杆上的非反光标记区,只要检测到该光电检测装置,光电传感器就会输出高电平给到主控装置,主控装置即可发出指令,断开电推杆的供电,使床体稳定的停止在水平位置。
30.本实用新型实施例公开了一种床体找平装置,该床体找平装置包括:光电检测装置、电推杆驱动装置及主控装置;主控装置分别与光电检测装置及电推杆驱动装置电连接;电推杆驱动装置用于驱动电推杆,电推杆上设置有非反光标记区,非反光标记区用于标志床体水平的水平位置;光电检测装置用于输出感光信号,感光信号包括检测到非反光标记区的非反光信号或未检测到非反光标记区的反光信号;主控装置用于接收感光信号,且输出控制信号,控制信号用于指示对电推杆的控制方式;电推杆驱动装置还用于接收控制信号,并驱动电推杆。通过光电检测装置以及在电推杆上设置一个标志床体水平位置的非反光标记区,便可以利用光电检测装置在检测到该非反光标记区的非反光信号时,实现床体找平,使得床体找平实现简单、操作简易、成本低廉且精度较高。
31.请参阅图2,图2为本实用新型实施例中一种床体找平装置的另一结构框图,如图2所示床体找平装置具体包括:
32.主控装置101、电推杆驱动装置102、光电检测装置103及运行提示单元106,其中,电推杆驱动装置102包括继电器控制单元1021及按键单元1022;主控装置分别与光电检测装置、继电器控制单元、按键单元及运行提示单元电连接;
33.其中,主控装置用于接收感光信号以及按键信号,且输出控制信号,控制信号用于指示对电推杆的控制方式,电推杆104上设置有非反光标记区105,非反光标记区用于标志床体水平的水平位置。光电检测装置用于输出感光信号,感光信号包括检测到非反光标记区的非反光信号或未检测到非反光标记区的反光信号。
34.需要说明的是,图2所示的主控装置、光电检测装置及电推杆驱动装置与图 1所示主控装置、光电检测装置及电推杆驱动装置的内容相似,为避免重复此处不做赘述,具体可参阅图1所示主控装置、光电检测装置及电推杆驱动装置的内容。
35.进一步的,电推杆驱动装置包括继电器控制单元1021及按键单元1022;按键单元用于输出按键信号至主控装置。继电器控制单元用于接收主控装置的控制信号,继电器控制单元用于驱动电推杆。其中,按键单元可以输出按键信号,该按键信号通过用户的触动按
键生成,该按键单元可以包括至少一个按键、没饿过按键对应一个按键引脚,示例性的,按键单元具有三个按键,每个按键对应一个按键引脚,每个按键引脚对应一个按键信号,按键信号包括但不限于床体向上倾斜信号、床体向下倾斜信号以及床体水平信号,每个按键引脚均与主控装置的电连接,用于将对应的按键信号输出至主控装置。在主控装置接收到对应的按键信号时,便会输出该按键信号对应的控制信号,并输出至继电器控制单元。继电器控制单元接收到主控装置的控制信号,便会驱动电推杆,以实现用户选择的床体倾斜调节。并且,在用户选择的按键输出床体水平信号时,主控装置会在接收到光电检测装置的感光信号为非反光信号时,断开继电器控制单元的电源,停止对继电器控制单元的供电,停止驱动电推杆,这样可以使得床体的倾斜角度可以平稳的停在水平位置,实现床体的一键水平。
36.运行提示单元106用于接收主控装置发送的运行信号,并输出运行提示。其中,运行信号包括但不限于床体找平装置是否开启的信号、或者开启之后主控装置控制电推杆向上或向下的提示信号等等。对应的运行提示则可以为通过发光二极管进行运行状态的提示。比如,如果是床体找平装置是否开启的信号,那么便可以在用户开启时输出绿灯的运行提示,在用户关闭时输出红灯或不亮灯的运行提示;如果是开启之后主控装置控制电推杆向上或向下的提示信号,则可以为开启时输出绿灯的运行提示,当推杆向上时,可以开启从下至上的流水灯的等效,提示床体正在向上运行,当推杆向下时,可以开启从上至下的流水灯的灯效,提示床体正在向下运行,在此举例不做限定。
37.进一步的,为更好理解本实用新型实施例,请继续参阅图3-8所示的电路连接示意图,如图3-8所示的电路连接示意图具体如下:
38.在一种可行实现方式中,可参阅图3,本实用新型实施例中一种主控装置的电路连接示意图,该主控装置101包括:主控芯片u1、晶振电路、复位电路、串口调试电路、第五电感l1、第十电容c11、第十一电容c12、第十一电阻r29、至少一个第十二电阻(r24、25、26)、至少一个第十三电阻(r27、r28)、第十四电阻r30。
39.具体的,主控芯片的外部振荡器引脚5(pd0_osc_in)以及外部振荡器引脚6(pd1_osc_out)与晶振电路电连接,具体的,该晶振电路的输入端 (slave_osc_in)与主控芯片的外部振荡器引脚5(pd0_osc_in)电连接,该晶振电路的输出端(slave_osc_out)与主控芯片的外部振荡器引脚6 (pd1_osc_out)电连接。主控芯片的复位引脚7(nrst)与复位电路的输出端(slave_nrst)电连接;主控芯片的串口调试引脚与串口调试电路电连接,具体的,串口调试电路的第一引脚(slave_usart1_tx)与主控芯片的串口调试引脚 30(pa9)电连接,串口调试电路的第二引脚(slave_usart1_rx)与主控芯片的串口调试引脚31(pa10)电连接,串口调试电路的第三引脚(slave_jtms_swdio) 与主控芯片的串口调试引脚34(pa13)电连接,串口调试电路的第四引脚 (slave_jtck_swclk)与主控芯片的串口调试引脚37(pa14)电连接。
40.主控芯片的第一输入引脚11(pa1)经第十一电阻r29与光电检测装置的输出端(linear motor_check)电连接。
41.一个主控芯片的第二输入引脚经一个第十二电阻与按键单元包括的一个按键引脚电连接,其中,示例性的,主控芯片的第二输入引脚包括第二输入引脚14 (pa4)、第二输入引脚15(pa5)及第二输入引脚16(pa6),第十二电阻包括第十二电阻r24、第十二电阻25及第十二电阻r26,按键单元可以包括三个按键引脚,例如,向上倾斜引脚(linear_up)、向下
倾斜引脚(linear_down) 及水平引脚(honizon),主控芯片的第二输入引脚14(pa4)与按键单元包括的向下倾斜引脚(linear_down)经第十二电阻r24电连接,主控芯片的第二输入引脚15(pa5)与按键单元包括的向上倾斜引脚(linear_up)经第十二电阻r25 电连接,主控芯片的第二输入引脚16(pa6)与按键单元包括的水平引脚(honizon) 经第十二电阻r26电连接。
42.主控芯片的一个第一输出引脚经一个第十三电阻(r27、r28)与继电器控制装置包括的一个继电器控制电路的输入端电连接。其中,主控芯片的第一输出引脚可以为两个,包括第一输出引脚pa7及第一输出引脚pb0,相应的第十三电阻也可以为两个,包括第十三电阻r27及第十三电阻r28,继电器控制装置包括至少两个继电器控制电路,一个继电器控制电路用于控制电推杆伸出,实现向上倾斜,另一个控制电推杆收缩实现向下倾斜。示例性的,主控芯片的第一输出引脚pa7经第十三电阻r27与一个继电器控制电路输入端(linear_fall_relay_drive) 电连接;主控芯片的第一输出引脚pb0经第十三电阻r28与另一个继电器控制电路输入端(linear_rise_relay_drive)电连接。
43.主控芯片的第二输出引脚pb12经第十四电阻r30与继电器控制装置包括的继电器控制单元的电源信号处理电路的输入端(linear_motor_power_enable)电连接;主控芯片的第三输出引脚pb8与运行提示单元的输入端(slave_led)电连接。主控芯片的电源电压引脚vdda分别与第五电感l1的一端、第十电容 c11的一端及第十一电容c12的一端电连接,第五电感的另一端与数字电源电压端电连接,第十电容的另一端及第十一电容的另一端均与公共地端电连接.
44.进一步的,主控芯片的电源电压端vssa经电感fb1与公共地端电连接;主控芯片的第1引脚(vbat)、第24引脚(vdd_1)、第34引脚(vdd_2)以及第48引脚(vdd_3)均与数字电源电压端(dvcc 3v3_slave)电连接。
45.在一种可行实现方式中,可参阅图4本实用新型实施例中一种光电检测装置的电路连接示意图,该光电检测装置103包括:反相器u2、光电传感器u3、第一接口j5、第一电阻r21、第二电阻r35、第三电阻r39、第四电阻r40、第一电感l9、第一电容c26及第二电容c27;光电传感器的输出引脚3经第一电感 l9及第二电阻r35与反相器的输入引脚电连接,反相器的输出引脚4(y)经第三电阻r39与主控装置包括的主控芯片的第一输入引脚11(pa1)电连接,所述第一电感l9及第二电阻r35之间还电连接有第二电容c27的一端,所述第二电容c27的另一端与公共地端电连接,所述第二电阻r35与所述反相器的输入端之间还电连接有第四电阻r40的一端,反相器的电源电压端5(vdd)分别与第一电容c26的一端和数字电源电压端(dvcc 3v3)电连接,第一电容c26的另一端与公共地端电连接,所述第一接口j5的电源电压端引脚经第一电阻r21与数字电源电压端(dvcc 3v3)电连接,所述第四电阻r40的另一端与数字电源电压端(dvcc 3v3)电连接。
46.其中,图4(1)中接插件j6的第四引脚与图4(2)的第一接口j5的第3 引脚电连接,进而使得光电传感器u3的输出引脚4与反相器的反相器的输入引脚a电连接,图4(1)中u3为光电传感器,j6为接插件,接插件为光电传感器供电提供电源,且将传感器的输出信号“out”传输给单片机。在本实施例中,是通过反相器对传感器的输出信号“out”处理后,将感光信号 (linearmotor_check)传输给单片机(主控芯片u1),该光电传感器u3由红外led和光敏器件构成光电传感器u3的发射端和探测端组成,该光电传感器 u3的1脚和2脚是红外
led电源正负极,电源接通后向外发射红外线,如果前方有反光物体,红外线则反射回来,光敏器件受到反射回来的红外线的影响,导通3脚和4脚到地,拉低信号“out”的电平,如果前方没有反光物体,光敏器件则不工作,3脚和4脚不形成导通状态,信号“保持”高电平。进一步的,图 4(1)中包括电阻c38、电容c39、电阻r43,其中,电阻c38的一端与公共地端电连接,电阻c38的另一端分别与接插件j6的第3引脚以及光电传感器的1 脚(红外led的正极)电连接,电容c39的一端及电阻r43的一端电连接于光电传感器u3的3脚(输出端)以及接插件j6的4脚之间。
47.在一种可行实现方式中,可参阅图5为本实用新型实施例中一种按键单元的电路连接示意图,如图5所示按键单元1022包括:具有至少一个按键引脚的第二接口j3、至少一个tvs二极管、至少一个第四电感、至少一个第七电阻、至少一个第九电容。其中,一个按键引脚分别与一个tvs二极管的负极及一个第四电感的一端电连接;一个第四电感的另一端分别与一个第七电阻的一端、一个第九电容的一端以及一个主控装置包括的主控芯片的第二输入引脚电连接;一个 tvs二极管的正极及一个第九电容的另一端与公共地端电连接;一个第七电阻的另一端与数字电源电压端电连接。也就是说,每个按键引脚与主控芯片的传输线路上,均设置有一个tvs二极管、第四电感、第七电阻以及第九电容。
48.示例性的,第二接口j3具有三个按键引脚,分别为按键引脚2、按键引脚3 及按键引脚4;相应的tvs二极管为三个,分别是tvs二极管d10、tvs二极管d11及tvs二极管d12。第四电感为三个,分别是第四电感l6、第四电感l7 及第四电感l8。第七电阻为三个,分别是第七电阻r37、第七电阻r38及第七电阻r42。第九电容为三个,分别是第九电容c35、第九电容c36及第九电容 c37。请继续参阅图5,具体电路连接可以如下:按键引脚2(linear_down) 分别与tvs二极管d10的负极及第四电感l6的一端电连接;第四电感l6的另一端分别与第七电阻r37的一端、第九电容c35的一端以及主控装置包括的主控芯片的主控芯片的第二输入引脚14(pa4)电连接;tvs二极管d10的正极及第九电容c35的另一端与公共地端电连接;第七电阻r37的另一端与数字电源电压端(dvcc 5v)电连接;按键引脚3(linear_up)分别与tvs二极管d11的负极及第四电感l7的一端电连接;第四电感l7的另一端分别与第七电阻r38 的一端、第九电容c36的一端以及主控装置包括的主控芯片的主控芯片的第二输入引脚15(pa5)电连接;tvs二极管d11的正极及第九电容c36的另一端与公共地端电连接;第七电阻r38的另一端与数字电源电压端(dvcc 5v)电连接。按键引脚4(honizon)分别与tvs二极管d12的负极及第四电感l8的一端电连接;第四电感l8的另一端分别与第七电阻r39的一端、第九电容c37的一端以及主控装置包括的主控芯片的主控芯片的第二输入引脚16(pa6)电连接;tvs 二极管d11的正极及第九电容c36的另一端与公共地端电连接;第七电阻r38 的另一端与数字电源电压端(dvcc 5v)电连接。
49.在一种可行实现方式中,可参阅图6至图7为本实用新型实施例中一种继电器控制单元的电路连接示意图;继电器控制单元102包括:第一二极管d8、电推杆接口j4、电源信号处理电路10211及至少两个继电器控制电路(10212及 10213),每个继电器控制电路包括的继电器ls的常闭触点5均接地;且一个继电器控制电路包括的继电器ls的常闭触点5与另一个继电器控制电路包括的继电器ls的常开触点4通过第一二极管d8电连接,第一二极管d8的正极与一个继电器控制电路包括的继电器ls的常闭触点5电连接,第一二极管d8的负极与另一个继电器控制电路包括的继电器ls的常开触点4电连接;每个继电器控制电路包括
的继电器ls的常开触点4均与电源信号处理电路10211的输出端(liner motor power)电连接;每个继电器控制电路包括的继电器ls的线圈的一端分别与主控装置包括的主控芯片的第一输出引脚(pa7\pb0)电连接;每个继电器控制电路包括的继电器的输出触点3分别与电推杆接口j4电连接。其中,电推杆接口j4具有两个驱动引脚,每个继电器控制电路包括的继电器的输出触点3 分别与一个驱动引脚电连接。
50.其中,图6为电源信号处理电路的示意图;图7为继电器控制电路的示意图。请参阅图6,该电源信号处理电路的输入端(linear_motor_power_enable)与主控芯片的pb12,该电源信号处理电路的输入端用于接收推杆电源使能信号 (linear_motor_power_enable),该电源信号处理电路的输入端经电阻r22及电阻r23与逆变元件q4的栅极电连接,逆变元件q4的栅极与电阻r23之间还电连接有电阻r36的一端,电阻r36的另一端及逆变元件q4的源极均与公共地端电连接,逆变元件q4的漏极与电阻r19的一端电连接,电阻r19的另一端分别与逆变元件q2的栅极、电阻r9的一端以及电容c22的一端电连接,逆变元件 q2的源极与电阻r9的另一端以及电容c22的另一端电连接,逆变元件q2的源极还分别与电容c20的一端、电容c21的一端以及24v电源电压端电连接,电容c20的另一端及电容c21的另一端均与公共地端电连接。其中,本实施例中的逆变元件可选用场效应晶体管(mosfet)。
51.该逆变元件q2的漏极分别与电容c23的一端、电容c24的一端、电容c25 的一端及电容c19的一端电连接,电容c23的另一端、电容c24的另一端、电容c25的另一端及电容c19的另一端均与公共地端电连接。进一步的,该电源信号处理电路的输出端(linear_motor_power)为逆变元件q2的漏极与电容c19 的连接端。该信号处理电路的输出端分别与每个继电器控制电路包括的继电器的常开触点4电连接,以此为继电器控制电路进行供电。
52.可继续参阅图7,图7中具有两个继电器控制电路,分别为继电器控制电路 10212以及继电器控制电路10213。其中,继电器控制电路10212包括:继电器 ls1、第二二极管d7、第三电容c13、第四电容c14、第五电容c15、第六电容c16、第七电容c17、第八电容c18、第一逆变元件q3、第二电感l2及第三电感l3、第五电阻r13以及第六电阻r20。继电器控制电路10213包括:继电器 ls2、第二二极管d9、第三电容c29、第四电容c30、第五电容c31、第六电容 c32、第七电容c33、第八电容c34、第一逆变元件q6、第二电感l4及第三电感l5、第五电阻r45以及第六电阻r46。
53.进一步的,继电器控制电路10212具体连接关系如下:继电器ls1的输出触点3分别与第二电感l2的一端及第三电感l3的一端电连接,第二电感l2的另一端与第三电感l3的另一端电连接,第三电感l3的另一端还分别与第三电容 c13的一端、第四电容c14的一端、以及第五电容c15的一端电连接,第三电容 c13的另一端、第四电容c14的另一端、以及第五电容c15的另一端均与公共地端电连接;第五电容c15的另一端还与电推杆接口j4的一端电连接;继电器ls1 的线圈的一端1分别与第二二极管d7的负极、第六电容c16的一端、第七电容 c17的一端、第八电容c18的一端以及数字电源电压端电连接;第二二极管d7 的正极以及第六电容c16的另一端均与继电器的线圈的另一端电连接;继电器 ls1的线圈的另一端2还与第一逆变元件q3的漏极电连接;第一逆变元件q3 的栅极分别与第五电阻r13的一端以及第六电阻r20的一端电连接;第五电阻 r13的另一端(linear_rise_relay_drive)与主控装置包括的主控芯片的第一输出引脚pb0电连接;第六电阻r20的另一端、第一逆变元件q3的源极、第七电容 c17的另一端及第八电容c18的另一端均与公共地端电连接。
54.继电器控制电路10213具体连接关系如下:继电器ls2的输出触点3分别与第二电感l4的一端及第三电感l5的一端电连接,第二电感l4的另一端与第三电感l5的另一端电连接,第三电感l5的另一端还分别与第三电容c29的一端、第四电容c30的一端、以及第五电容c31的一端电连接,第三电容c29的另一端、第四电容c30的另一端、以及第五电容c31的另一端均与公共地端电连接;第五电容c31的另一端还与电推杆接口j4的一端电连接;继电器ls2的线圈的一端1分别与第二二极管d9的负极、第六电容c32的一端、第七电容c33的一端、第八电容c34的一端以及数字电源电压端电连接;第二二极管d9的正极以及第六电容c32的另一端均与继电器的线圈的另一端2电连接;继电器ls2的线圈的另一端2还与第一逆变元件q6的漏极电连接;第一逆变元件q6的栅极分别与第五电阻r45的一端以及第六电阻r46的一端电连接;第五电阻r45的另一端(linear_fall_relay_drive)与主控装置包括的主控芯片的第一输出引脚 (pa7)电连接;第六电阻r46的另一端、第一逆变元件q6的源极、第七电容c33 的另一端及第八电容c34的另一端均与公共地端电连接。
55.可以理解的是,继电器ls1的常闭触点5以及继电器ls2的常闭触点5均经电阻r41与公共地端电连接,继电器ls1的常开触点4与继电器ls2的常闭触点5通过二极管d8电连接,其中,二极管d8的负极与继电器ls1的常开触点4电连接,二极管d8的正极与继电器ls2的常闭触点5电连接。电推杆接口 j4包括驱动引脚1以及驱动引脚2,则第五电容c15的另一端与电推杆接口j4 的驱动引脚1电连接,第五电容c31的另一端与电推杆接口j4的驱动引脚2电连接。
56.在一种可行实现方式中,可继续参阅图7,图7中电推杆接口j4的驱动引脚 1还与电阻r18的一端以及电阻r12的一端电连接,电阻r12的另一端与电容 c28的一端电连接,电容c28的另一端以及电阻r18的另一端均与驱动引脚2 电连接。
57.在一种可行实现方式中,图8为本实用新型实施例中一种运行提示单元的电路连接示意图,图8所示运行提示单元106包括:发光二极管d1、第八电阻r1、第九电阻r4、第十电阻r5、第二逆变元件q1;第八电阻r1的一端与数字电源电源端(dvcc 3v3_slave)电连接,第八电阻r1的另一端与发光二极管d1的阳极电连接,发光二极管d1的阴极与第二逆变元件q1的漏极电连接;第二逆变元件q1的栅极分别与第九电阻r4的一端以及第十电阻r5的一端电连接;第九电阻r4的另一端与主控装置包括的主控芯片的第三输出引脚pb8电连接;第二逆变元件q1的源极及第十电阻r5的另一端均与公共地端电连接。
58.本实用新型实施例的工作原理,具体如下:用户开启床体找平装置后,可以通过按键单元触发对应的按键发出床体的控制需求至主控芯片,主控芯片接收到按键信号后,生成对应的控制信号,以执行不同的控制方式控制电推杆,若该按键信号为水平按键信号,则主控芯片会输出该水平按键信号对应的推杆控制信号至继电器控制装置,以控制电推杆回到水平位置,当感光信号为非反光信号时,则断开继电器控制装置的供电,使得床体恢复到水平位置,实现床体找平。
59.本实用新型实施例公开了一种床体找平装置,该床体找平装置包括:主控装置、电推杆驱动装置、光电检测装置及运行提示单元,其中,电推杆驱动装置包括继电器控制单元及按键单元;主控装置分别与光电检测装置、继电器控制单元、按键单元及运行提示单元电连接;主控装置用于接收感光信号以及按键信号,且输出控制信号,控制信号用于指示对电推杆的控制方式,电推杆上设置有非反光标记区,非反光标记区用于标志床体水平的水平
位置。光电检测装置用于输出感光信号,感光信号包括检测到非反光标记区的非反光信号或未检测到非反光标记区的反光信号。通过光电检测装置以及在电推杆上设置一个标志床体水平位置的非反光标记区,便可以利用光电检测装置在检测到该非反光标记区的非反光信号时,实现床体找平,使得床体找平实现简单、操作简易、成本低廉且精度较高。并且,通过非反光信号直接切断推杆供电,还不会因为使用次数多而出现累计误差。
60.请参阅图9为本实用新型实施例中一种育婴箱的结构示意图,该育婴箱包括图1或图2中任一项所示床体找平装置、电推杆2及床体4,该电推杆2上设置有非反光标记区3,具体的,该非反光标记区3可以设置在电推杆2的主轴上,其中,当床体处于水平状态时,床体找平装置包括的光电检测装置1与非反光标记区3的位置关系为正对。其中,电推杆用于床体的姿态调节,具体可以是通过电推杆的收缩或伸出使得床体上倾斜或下倾斜,当床体未处于水平位置,还可以通过床体找平装置中的光电检测装置定位床体的水平位置,以在需要将床体恢复至水平姿态时,在主控装置接收到感光信号为非反光信号时切断推杆供电,使得床体恢复至水平姿态。
61.本实用新型实施例中一种育婴箱,该育婴箱包括图1或图2中任一项所示床体找平装置、电推杆及床体,该电推杆上设置有非反光标记区,具体的,该非反光标记区可以设置在电推杆的主轴上,其中,当床体处于水平状态时,床体找平装置包括的光电检测装置与非反光标记区的位置关系为正对。通过光电检测装置以及电推杆上的一个标志床体水平位置的非反光标记区,即可实现床体找平,使得床体找平简单高效实现。结构要求简单,易安装拆卸;成本较低,控制精度高,不会因为使用次数多而出现累计误差;稳定性好,不会出现过水平位置情况。
62.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
63.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。