技术特征:
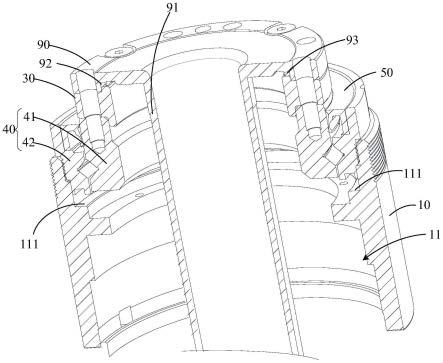
1.一种关节模组的装配方法,其特征在于,所述关节模组包括:电机组件,包括外壳、电机定子和电机转子,所述外壳设有一端开口的安装腔,所述电机定子和电机转子安装于所述安装腔;减速器,安装于所述电机组件的开口端,所述减速器具有输入轴和输出轮,所述输入轴伸入所述安装腔并与所述电机转子连接,所述输出轮与所述输入轴差速配合并外露于所述安装腔;支撑轴承,包括转动配合的内圈和外圈,所述内圈与所述输出轮固定连接,所述外圈的外周壁设有外螺纹,所述外壳开口端的内周壁设有内螺纹,所述外圈与所述外壳的开口端通过螺纹固定配合;其中,所述减速器设置为谐波传动减速器;所述减速器还包括柔性轴承和柔性传动轮,所述输入轴通过所述柔性轴承与所述柔性传动轮配合,所述输出轮套设于所述柔性传动轮并与所述柔性传动轮通过啮齿可传动配合,所述柔性传动轮的一端伸入所述安装腔并沿径向朝外翻折形成外翻边;所述安装腔内对应所述柔性传动轮端面的位置设置有支撑台阶,所述支撑台阶抵接所述外翻边;所述关节模组的装配方法包括:获取所述支撑台阶和所述外翻边之间的当前压力;比较当前压力和预设压力范围;确定当前压力超出所述预设压力范围,调节所述外圈和所述外壳的轴向相对位置,以使所述支撑台阶和所述外翻边之间的当前压力处于预设压力范围。2.如权利要求1所述的关节模组的装配方法,其特征在于,获取所述支撑台阶和所述外翻边之间的当前压力的步骤包括:获取所述支撑台阶和所述外翻边之间多个检测位置的挤压力,多个检测位置沿支撑台阶的周向排布;获取多个挤压力中的挤压最大值和挤压最小值;将挤压最大值和挤压最小值均作为当前压力。3.如权利要求2所述的关节模组的装配方法,其特征在于,所述比较当前压力和预设压力范围的步骤包括:比较挤压最大值与预设压力范围的最大值,比较挤压最小值与预设压力范围的最小值。4.如权利要求1所述的关节模组的装配方法,其特征在于,所述确定当前压力超出所述预设压力范围,调节所述外圈和所述外壳的轴向相对位置,以使所述支撑台阶和所述外翻边之间的当前压力处于预设压力范围的步骤包括:确定当前压力大于预设压力范围的最大值,旋转调节外圈和外壳,以减小所述支撑台阶和所述外翻边之间的当前压力;确定当前压力小于预设压力范围的最小值,旋转调节外圈和外壳,以增加所述支撑台阶和所述外翻边之间的当前压力。5.如权利要求4所述的关节模组的装配方法,其特征在于,所述确定当前压力大于预设压力范围的最大值,旋转调节外圈和外壳,以减小所述支撑台阶和所述外翻边之间的当前压力的步骤包括:
获取当前压力大于预设压力范围最大值的第一压力差值;比较第一压力差值与第一预设压力差值和第二预设压力差值,其中,第一预设压力差值大于第二预设压力差值;确定第一压力差值大于第一预设压力差值,使外圈和外壳相对旋转两圈;确定第一压力差值小于第二预设压力差值,使外圈和外壳相对旋转1/4~4/5圈;确定第一压力差值小于或者等于第一预设压力差值,大于或者等于第二预设压力差值,使外圈和外壳相对旋转4/5~2圈。6.如权利要求4所述的关节模组的装配方法,其特征在于,所述确定当前压力小于预设压力范围的最小值,旋转调节外圈和外壳,以增加所述支撑台阶和所述外翻边之间的当前压力的步骤包括:获取当前压力小于预设压力范围最小值的第二压力差值;比较第二压力差值与第三预设压力差值和第四预设压力差值,其中,第三预设压力差值大于第四预设压力差值;确定第二压力差值大于第三预设压力差值,使外圈和外壳相对旋转两圈;确定第二压力差值小于第四预设压力差值,使外圈和外壳相对旋转1/4~4/5圈;确定第二压力差值小于或者等于第三预设压力差值,大于或者等于第四预设压力差值,使外圈和外壳相对旋转4/5~2圈。7.如权利要求1所述的关节模组的装配方法,其特征在于,所述外翻边包括连接部和抵接部,所述连接部连接柔性传动轮和所述抵接部,所述抵接部的厚度d1大于所述连接部的厚度d2;和/或,所述关节模组还包括端盖,所述端盖套设于所述输出轮远离支撑轴承的一侧,所述端盖上设置有第一止口,所述输出轮设置有第一凸筋,所述第一凸筋与所述第一止口对应设置;和/或,所述端盖上设置有第二凸筋,所述输出轮设置有第二止口,所述第二凸筋与所述第二止口对应设置。8.如权利要求7所述的关节模组的装配方法,其特征在于,所述外圈位于所述安装腔内的一端端壁抵接于所述抵接部,所述外圈的端壁与所述抵接部之间设有第二密封圈。9.如权利要求8所述的关节模组的装配方法,其特征在于,所述抵接部呈环形设置,所述抵接部的外侧壁与所述外圈的外侧壁平齐,所述抵接部的宽度大于所述外圈的侧壁厚度。10.一种关节机器人,其特征在于,包括如权利要求1至9任一项所述的关节模组的装配方法所装配的关节模组。
技术总结
本发明公开一种关节模组的装配方法及关节机器人,关节模组包括:电机组件,包括外壳、电机定子和电机转子,外壳设有一端开口的安装腔;减速器安装于电机组件的开口端;支撑轴承包括转动配合的内圈和外圈,外圈与外壳的开口端通过螺纹固定配合;减速器还包括柔性轴承和柔性传动轮,柔性传动轮的一端伸入安装腔并沿径向朝外翻折形成外翻边;安装腔内设置有支撑台阶,支撑台阶抵接外翻边;关节模组的装配方法包括:获取支撑台阶和翻边之间的当前压力;比较当前压力和预设压力范围;确定当前压力超出预设压力范围,调节外圈和外壳的轴向相对位置,以使支撑台阶和外翻边之间的当前压力处于预设压力范围。本发明关节模组可提高关节模组的传动可靠性。的传动可靠性。的传动可靠性。
技术研发人员:贾玺庆
受保护的技术使用者:深圳市零差云控科技有限公司
技术研发日:2022.03.15
技术公布日:2022/6/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。