用于固态lidar系统的投影仪
技术领域
1.本公开涉及一种用于通过使用激光束和基于飞行时间(tof)的感测系统来确定到场景的距离的lidar(光检测和测距)系统。更具体而言,本公开涉及一种用于用离散光斑图案照亮场景的lidar投影仪。
背景技术:
2.lidar系统通过用激光照亮场景并通过在检测器中检测反射激光来测量到场景的距离,检测器通常位于发射激光的激光源附近。
3.一般而言,lidar系统包括两个主要组件:配置用于用激光照亮场景的投影仪和用于检测反射激光的检测系统。一些lidar系统使用投影仪,该投影仪以均匀的平面激光图案(也称为全局照明)照亮场景,并且检测系统相应地被适配成基于全局照明后的反射光来确定距离信息。然而,本公开涉及一种lidar系统,其中投影仪用离散的激光光斑图案照亮场景,并且其中检测系统被适配成基于光斑图案照明后的反射激光来确定距离信息。
4.大多数已知的lidar系统都使用直接tof(dtof)检测方法。这些系统包括在纳秒脉冲范围内操作的强大脉冲激光器、扫描脉冲激光束的机械扫描系统、以及脉冲检测器。这一类型的系统目前可从包括加利福尼亚州摩根山velodyne lidar在内的供应商处获得。作为现有系统的示例,velodynehdl-64e在机械旋转结构中以每秒5到15转的速度使用64个高功率激光器和64个雪崩二极管检测器。
5.已知这些dtof系统能够以高空间准确度来测量距离。然而,这些系统也有一些缺点。例如,这些系统需要具有无法用当前可用的半导体激光器获得的过高功率电平的激光器,当前可用的半导体激光器的功率电平低几个数量级。另外,用于扫描目的的机械旋转元件的使用进一步限制了此类系统的小型化、可靠性和成本降低的前景。
6.lidar系统的紧凑性是汽车行业应用的一个重要因素,其中lidar系统例如将耦合到汽车的前挡风玻璃或前保险杠上。事实上,lidar系统是开发自动驾驶或驾驶员辅助系统的关键因素。在这一上下文中,lidar系统被用于检测障碍物,诸如车辆环境中的其他车辆或物体。
7.在wo2017/068199中,提出了一种固态lidar系统,其允许将投影仪和基于固态技术的检测系统放置在紧凑壳体中。该系统基于距离选通检测技术,不同于dtof技术。wo2017/068199中公开的该系统包括用于用离散光斑图案照亮场景的投影仪,其中每个光斑包括激光脉冲的时间序列。激光由形成紧凑的低功率激光系统的固态激光器提供,固态激光器阵列是基于半导体的激光器,也称为vcsel。每个激光束都是脉冲激光束,包括激光脉冲的时间序列。基于cmos的距离选通检测器被用于检测反射激光的光斑,该光斑代表由场景反射的离散光斑图案。该检测器还包括用于与场景的照明同步地累积反射激光的控制装置。处理装置最终允许基于累积的反射激光来计算到场景的距离。
8.如wo2017/068199所述,为基于离散光斑图案照明的lidar系统开发固态投影仪是具有挑战性的。实际上,由于使用不同的个体激光源,例如个体激光源的特性存在变化,包
括但不限于强度、光束发散度、角辐照度、波长、脉冲形状和热行为的变化。这导致在场景上的时间和空间上都非均匀的光斑图案的投影。所有这些元素都会对lidar系统的总体性能产生影响,例如对距离测定的精准度和/或准确度以及可覆盖的距离范围产生影响。
9.因此,有改进用于生成离散光斑图案的lidar投影仪的空间。
技术实现要素:
10.本公开的目的是提供一种用于使用离散光斑图案来照亮场景的稳健、可靠、紧凑且具有成本效益的投影仪,并且其中该投影仪被设想为用作固态lidar系统的一部分,该固态lidar系统用于以特定应用(诸如举例而言汽车应用)所需的可接受空间准确度来确定距离。
11.本公开被定义在所附独立权利要求中。从属权利要求定义了有利的实施例。
12.根据本公开的一方面,提供了一种用于用离散光斑图案照亮场景的投影仪。
13.根据本公开的此类投影仪包括诸如一维或二维激光器阵列的激光器阵列、混合室、整形光学系统和投影仪透镜系统。
14.该激光器阵列包括多个离散的固态激光光源,操作用于发射发散的第一激光束。
15.混合室沿着投影仪的主光轴z延伸,并被配置成接收并允许诸第一激光束中的每一者发散,直到对于每个第一激光束,其光线的至少一部分与相邻第一激光束的光线交叠。
16.混合室应被解释为空心体,其中混合室的周向侧形成三维空心体。周向侧是混合室的壁。
17.整形光学系统被配置成接收从混合室出来的诸第一激光束的交叠光线,优选地重新聚焦这些交叠光线,并产生多个离散的第二激光束,其中每个第二激光束包括来自多个第一激光束的光线。
18.投影仪透镜系统被配置成接收第二激光束并向场景投射第二激光束,并且其中所投射的第二激光束形成离散光斑图案。
19.利用根据本公开的投影仪,同时解决了现有技术设备存在的多个缺点,并改善了性能,如下文将更详细地讨论的。
20.有利地,诸第一激光束的混合将造成入射到整形光学系统的均匀功率场,这将进一步造成由第二激光束形成的更均匀的光斑图案,这例如提高了使用本投影仪来照明场景的lidar系统的准确度。
21.此外,这种混合将导致针对脉冲形状及其在时域和空域投影到场景上的光学特性的提高了的可重复性。
22.有利地,通过混合诸第一激光束的激光,可以降低关于固态激光光源(例如vcsel激光光源阵列)的质量约束。事实上,当多个激光源混合时,故障的第一激光束(即单个激光发射器)对第二激光束的总体光强和光分布的影响很小。它提高了成品率,从而降低了vcsel阵列的成本,并且它还提高了lidar系统的稳健性。
23.有利地,小型vcsel芯片可以布置成形成激光器阵列的vcsel芯片的一维或二维阵列。每个vcsel芯片包括多个激光发射器。以此方式,通过使用较小的vcsel芯片,解决了制造大型芯片的生产率问题,并且降低了生产成本。
24.有利地,通过捆绑多个第一激光束的光强度以形成第二激光束,可以通过形成第
二激光束来增加第二激光束的强度和亮度,使得第二激光束的数量低于初始第一激光束的数量。这增加了系统的检测责任和范围。激光束的强度和亮度分别被定义为光斑每表面积的光功率(例如以瓦特表示)和每立体角的光功率(即辐照度)。
25.有利地,可调整整形光学系统以调谐第二激光束的光斑大小。例如,大直径的光斑大小可被用于向前的方向以照亮道路,而小直径的光斑可被用于照亮周围环境。
26.有利地,根据本公开的投影仪可以是lidar系统的一部分,其中使用用于检测反射激光的距离选通检测技术,同时保持高空间准确度,例如汽车应用所需的准确度。实际上,通过提供混合室和整形光学系统,各种第一激光束的相干光被混合,并且所得的第二激光束基本上由相干激光组成。结果,导致如发明人在使用基于距离选通的现有技术lidar系统时所观察到的空间不精确的主导散斑(speckle)问题被大大降低。
27.在各实施例中,混合室内壁的至少一部分是用于反射激光的反射壁。
28.在各实施例中,由离散固态激光源激光器产生的激光具有在800nm和1600nm之间的波长。
29.在各实施例中,确定混合室的长度h,以使得在第一激光束传播通过混合室之后,每个第一激光束的光线的20%或更多、优选40%或更多、更优选60%或更多与相邻第一激光束的光线交叠。
30.在一些实施例中,在传播通过混合室之后,每个第一激光束的光线的100%与相邻第一激光束的光线交叠。
31.在各实施例中,每个激光源被配置成以等于或小于15
°
的发散角发射第一激光束。
32.在各实施例中,诸固态激光源被编组成各贴片(tile)。贴片随后形成例如一维或二维贴片阵列。每个贴片由多个固态激光源(即发射器)组成。贴片可以被解释为固态光源的子阵列,例如固态光源的一维或二维子阵列。在各实施例中,随后进一步定义沿主光轴测量的混合室的长度,使得在第一激光束传播通过混合室之后,对于每个贴片,其至少一部分光线与相邻贴片的光线交叠。在各实施例中,贴片是包含多个激光发射器的vcsel芯片,并且其中每个激光发射器将被解释成固态激光源。
33.在各实施例中,每个贴片的20%或更多、优选40%或更多、更优选60%或更多的光线与相邻贴片的光线交叠。在一些其他实施例中,每个贴片的激光的100%与相邻贴片的光线交叠。
34.有利地,更便宜的商用vcsel贴片可被用作产生第一激光束的主激光源。
35.有利地,当使用vcsel贴片作为主激光源时,诸贴片可以串联连接,从而需要更低的驱动电流并且因此需要较少散热。这也降低了系统成本并改进了系统的稳健性和热管理。
36.在各实施例中,混合室的内壁的至少一部分包括镜。有利地,激光器阵列的外围光源发射的光可能会击中该镜,并在混合室中反射回来。该镜有助于获得在垂直于主光轴的平面上均匀的光分布。
37.在各实施例中,整形光学系统包括微透镜阵列,该微透镜阵列包括多个微透镜,其中每个微透镜被配置成生成一个第二激光束。
38.在各实施例中,第一微透镜阵列被配置成使得每个微透镜包括位于平面或曲面上的焦点,并且其中平面或曲面位于第一微透镜阵列和投影仪透镜系统之间。
39.在进一步的实施例中,第一微透镜阵列的每个微透镜包括位于曲面上的焦点,并且其中所述曲面对应于投影仪透镜系统的弯曲焦平面。有利地,投影仪透镜系统不需要额外的透镜来校正投影仪透镜系统的光学像差,更确切而言是校正petzval场曲率。
40.在各实施例中,第一微透镜阵列中的每个微透镜包括位于曲面上的后焦点,并且其中所述曲面对应于投影仪透镜系统的弯曲前焦平面。
41.在一些实施例中,第一微透镜阵列的每个微透镜包括与投影仪的主光轴平行的光轴。
42.在优选实施例中,第一微透镜阵列的微透镜中的至少一部分包括不与投影仪的主光轴平行的光轴。有利地,可以减小投影仪透镜系统的大小。例如,可以减小投影仪透镜系统的直径。
43.在各实施例中,激光器阵列的每个激光源具有位于发射平面x-y中的发射表面,其中第一激光束在与垂直于所述发射平面x-y的主光轴z平行的方向上传播。
44.在各实施例中,根据本公开的投影仪还包括第二微透镜阵列,该第二微透镜阵列被配置成减小由固态激光源发射的第一激光束的发散角,优选地,第二微透镜阵列被布置在激光器阵列和第一微透镜阵列之间。
45.在优选实施例中,第一微透镜阵列中的微透镜的数量小于激光器阵列的固态激光源的数量。一般而言,第一微透镜阵列的微透镜的数量是根据为离散光斑图案提供的光斑所需要数量来选择的。
46.在一些实施例中,其中激光器阵列由多个vcsel芯片形成,并且其中投影仪包括第二微透镜阵列,第二微透镜阵列中的微透镜的数量等于或小于激光器阵列的发射器的总数。激光器阵列的发射器的总数是激光器阵列的每个vcsel芯片中的所有发射器的总和。
47.在其他实施例中,投影仪还包括漫射器、环行器(circulator)、布拉格体积光栅和扩束器中的任何一者或其任何组合。
48.有利地,尤其对于包括扩束器的投影仪的实施例,使用基于贴片的阵列而不受到贴片之间不可避免地存在的接缝的不利影响是可能的。实际上,扩束器被配置成增加贴片间区域中的照明,以便增加入射到第一微透镜阵列上的光分布的均匀性。
49.根据本公开的又一方面,提供了一种用于确定到场景的一个或多个对象的距离的固态lidar系统。
50.除了上面讨论的投影仪外,此类固态lidar系统还包括配置成检测代表由场景的一个或多个对象反射的离散光斑图案的反射激光光斑的、包括多像素检测器(例如距离选通或直接飞行时间型检测器)的光接收设备,用于控制投影仪和光接收设备以便与场景的照明同步地检测和积累反射激光的控制器,以及被配置成基于所累积的反射激光来计算到场景的一个或多个对象的距离的处理装置。
51.在基于距离选通检测技术的一些实施例中,固态lidar系统被配置成在至少两个连贯检测时间窗口期间检测反射激光,并且处理装置被配置成基于在两个连贯检测时间窗口期间检测到的激光来计算到对象的距离。
52.在基于距离选通检测技术的实施例中,固态lidar系统的控制器被配置成控制激光器阵列,以使得多个离散的固态激光源中的每一者以脉冲频率发射第一脉冲,使得f
p
≤1/(tof
max
pw),其中f
p
是脉冲频率,pw是时间脉宽,tof
max
是待确定的到对象的预定最大距
离d
max
的最大飞行时间。这一最大距离可被解释为lidar系统的最大工作范围。例如,该最大工作范围可以是50到500米之间的值。
53.在一些实施例中,贴片之间的贴片间间距(δ
t
)等于或大于0.3毫米,并且其中对于每个贴片,贴片的固态激光源之间的间隔距离(δ
vcsel
)等于或小于0.1毫米。
54.在各实施例中,处理装置包括处理器或微处理器。
55.在各实施例中,投影仪的投影仪透镜系统包括投影仪透镜,诸如物镜。
56.在各实施例中,一个或多个光学激光反射元件位于混合室内以用于延伸第一激光束的行进路径。有利地,可以减小混合室的长度,同时保持第一激光束的充分混合。
附图说明
57.将通过示例并参考附图更详细地解释本公开的这些和其他方面,附图中:
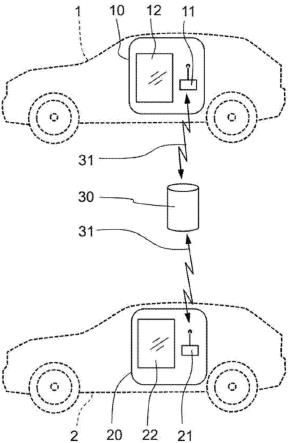
58.图1示意性地示出了根据本公开的lidar系统,
59.图2示意性地示出了投影在场景上的离散光斑图案,
60.图3示意性地示出了形成脉冲激光束的脉冲的时间序列,
61.图4示意性地示出了多个帧的重复,
62.图5示意性地示出了根据本公开的各实施例的投影仪的截面图,
63.图6示意性地说明了vcsel贴片几何结构,
64.图7示意性地示出了根据本公开的用于混合诸第一激光束以形成诸第二激光束的概念,
65.图8示意性地示出了根据本公开的各实施例的投影仪的截面图,其中投影仪包括vcsel贴片激光器阵列,
66.图9示意性地示出了根据本公开的一实施例的投影仪的一部分的截面图,该投影仪包括微透镜阵列,其中诸焦点位于曲面上,
67.图10示意性地示出了根据本公开的又一实施例的投影仪的一部分的截面图,该投影仪包括微透镜阵列,其中诸焦点位于曲面上,
68.图11示意性地示出了包括微透镜阵列的投影仪的截面图,其中每个微透镜具有与投影仪的主光轴平行的光轴,
69.图12示意性地示出了包括前端发射vcsel激光器阵列的投影仪的一部分,
70.图13示意性地示出了后端发射vcsel激光器阵列,
71.图14a至图14h示意性地示出了根据本公开的投影仪的各种实施例的截面,
72.图15a和图15b示意性地示出了如图14b所示的第二微透镜阵列的光学效应,
73.图16a和图16b示意性地示出了图14f中所示的扩束器的可能实现,
74.图17a和图17b示意性地示出了混合室的两个实施例,
75.图18示意性地示出了环行器的实施例,
76.图19示意性地示出了漫射器的工作原理。
77.这些附图的绘制既不是按比例也是不成比例的。一般而言,在附图中,相同组件由相同附图标记来表示。
具体实施方式
78.将根据具体实施例来描述本公开,这些实施例是本公开的说明性实施例而不应被解释为是限制性的。本领域技术人员将明白,本公开不受具体示出和/或描述的内容的限制,并且可以根据本公开的整体教学开发出替换或修改的实施例。所描述的附图仅是示意性的且是非限制性的。
79.动词“包括”以及相应词形变化的使用并不排除所陈述的元素以外的其他元素的存在。在元素前面使用冠词“一”、“一个”或“该”并不排除存在多个这样的元素。
80.此外,说明书中和权利要求中的术语第一、第二等等用于在类似的要素之间进行区分,并且不一定用于在时间上、空间上、以排名或以任何其他方式描述顺序。应当理解,如此使用的术语在适当的环境下是可互换的,并且本文中所描述的本公开的实施例能够以不同于本文中所描述或所解说的顺序操作。
81.贯穿本说明书,对“一个实施例”或“一实施例”的引用意味着结合该实施例描述的特定特征、结构或特性被包括在本公开的一个或多个实施例中。因此,短语“在一个实施例中”或“在实施例中”贯穿本说明书在各个地方的出现并不一定全部指代同一实施例,而是可以指代同一实施例。此外,在一个或多个实施例中,如通过本公开将对本领域普通技术人员显而易见的,特定的特征、结构或特性能以任何合适的方式进行组合。
82.根据本公开的一方面,提供了一种用于用离散光斑图案照亮场景的投影仪。此类投影仪例如可被用于固态lidar系统中,以确定到场景的距离。图5、图8至图11和图14a至图14h示出了根据本公开的投影仪的各种实施例的截面图。下面将进一步讨论这些不同实施例。
83.当在lidar系统中使用时,本公开的投影仪的实施例提供了提高lidar系统的准确度和精准度的优点。如本文所使用并参考lidar系统,术语“准确度(accuracy)”指距离测量的均值与实际距离之间的差,其中较高的准确度对应较小的差;术语“精准度(precision)”指距离测量在均值周围的散布(spread)(用标准偏差或等效测量来表示),因此,较高的精准度对应较小的散布。
84.不失一般性,下文将参考本公开的投影仪在lidar系统中的应用来描述它。lidar系统可以例如基于直接飞行时间(dtof)原理或基于距离选通或基于任何其他距离确定方法进行操作。本领域技术人员将明白,本公开的投影仪系统也可被用在其他计量和遥测系统中,诸如但不限于基于位移的测距系统。本公开的投影仪系统也可被用在非遥测应用中。
85.固态lidar系统,概述
86.lidar系统必须被解释为通过用激光照亮场景并用检测器测量反射激光来测量到该场景中的一个或多个对象的距离的任何系统。然而,本公开涉及一种特定类别的lidar系统,即利用半导体技术的所谓“固态”lidar系统。固态lidar系统必须被解释为使用固态技术产生激光以及使用检测器检测反射激光的系统。例如,在各实施例中,激光由vcsel型半导体激光器产生,并且检测器是基于cmos的半导体像素检测器。
87.场景被解释为一个区域,例如安装在汽车挡风玻璃或保险杠上的lidar设备所观察的区域。取决于lidar设备的视野,场景可以覆盖大面积或较小面积。汽车应用的视野是例如30
°
x10
°
、120
°
x20
°
或任何其他视野。场景可以包括例如处于距lidar设备不同距离处的各种对象,或几个对象或仅一个对象。lidar系统旨在对场景进行距离绘图,从而标识到
诸对象的不同距离或到场景的诸部分的距离。
88.取决于lidar系统的类型,lidar系统使用的激光可以是连续波、脉冲波或调幅波。
89.图1示意性地示出了根据本公开的固态lidar系统1的实施例的示例。此类用于确定到场景99的距离的系统1包括用于用离散光斑图案150照亮场景99的投影仪100以及包括多像素检测器(例如,距离选通多像素检测器或基于直接飞行时间的多像素检测器)的光接收设备300,其中每个光斑包括激光脉冲的时间序列,多像素检测器被配置成检测代表由场景对象反射的离散光斑图案的反射激光光斑。反射的激光形成反射的离散光斑图案350,且在图1中示意性地示出。反射的离散光斑图案350对应于由场景的对象反射的离散光斑图案150,并且作为多个检测光斑在距离选通多像素检测器上被观察到。
90.请注意,在图1中,投影光斑图案和反射光斑图案被示意性地表示为中断线,仅用于说明目的,并且因此这些中断线并不表示脉冲的实际定时。实际上,在实践中,如下文所述,当发射脉冲序列的脉冲时,通常仅在检测器中检测到(对象的可能反射后)前一脉冲后,才发射该序列的下一脉冲。
91.图2进一步示出了照亮场景99的离散光斑图案150的示例。图2上的圆圈示意性地示出了离散光斑图案150的光斑。离散光斑必须解释为彼此分开的光斑,如图2所示。光斑图案可以是规则图案或不规则图案。光斑图案的光斑数量可以因实施例而异,并且例如在10000到100000个光斑之间的范围内。在一些实施例中,光斑的数量也可以低得多并且低至四个光斑。如上所述,每个光斑包括激光脉冲序列,通常由脉冲激光束提供。
92.形成根据本公开的lidar系统的离散光斑的激光束所产生的激光的波长通常在800nm到1600nm之间。
93.在取值使用距离选通多像素检测器的实施例中,此类距离选通多像素检测器必须被解释为包含多个像素的检测器,并且其中检测器被配置成在至少两个连贯的检测时间窗口中检测并累积激光。
94.wo2017/068199中描述了距离选通多像素检测器的示例。此类检测器基于距离选通检测技术,其不同于直接tof技术。利用距离选通技术,在至少两个后续时间窗口内,反射激光作为时间的函数被检测,并且其中时间窗口基本等于形成离散光斑图案的所发射激光脉冲的脉宽。第一时间窗口通常基本上与对应于脉冲发射的时段相重叠。基于在至少两个时间窗口中标识的强度,可以确定到场景的距离。
95.如图1示意性地所示,固态lidar系统1还包括控制器200,用于控制光接收设备300和投影仪100以便与场景的照明同步地检测和累积反射的激光。lidar系统1还包括处理装置400,该处理装置400被配置成基于所累积的反射激光来计算到场景的对象的距离。在各实施例中,控制器200包括同步装置,其可包括常规时钟电路或振荡器。处理装置400通常包括处理器或计算机,其包括本领域已知的用于基于检测到的反射激光来计算到对象的距离的算法。
96.在其他实施例中,固态lidar系统没有使用飞行时间技术来确定到场景的距离,而是使用位移技术,例如在wo2015/004213中公开的。这些类型的基于位移的lidar系统包括多像素检测器和处理装置,处理装置被配置成通过确定用多像素检测器检测到的检测光斑相对于预定光斑位置的位移来确定对象的特性,诸如到对象的距离。如下文将更详细讨论的,根据本公开的投影仪可被用于基于飞行时间的lidar系统或基于位移的lidar系统。
97.在各实施例中,根据本公开的固态lidar系统包括至少包围投影仪100和光接收设备300的外壳。在其他实施例中,根据本公开的固态lidar系统包括包围投影仪100、光接收设备300和控制器200的外壳,并且优选地还包括处理装置400。
98.在实施例中,光接收设备300包括物镜,用于将反射激光图案投影到距离选通多像素检测器上。在优选实施例中,光接收设备300还包括窄带通滤光器,例如用于滤除日光。
99.如上所述,为了确定到对象的距离,采用多个帧来确定平均对象距离。因此,用离散光斑图案对场景的照明重复若干次,以便获得多个距离,即单帧距离测量,从而允许获取该多个单帧测量的平均值。帧可以以帧率ff重复,其通常远低于所投射激光束中的脉冲的脉冲频率f
p
。在图4中,示意性地示出了帧60的重复的示例,并示出了帧率ff。在一示例中,示出了三个帧的重复,实际上,用于确定平均距离值的帧重复次数通常要大得多。如图4所示,在每个脉冲链50之后,需要处理时间65来读出曝光值并处理所采集的数据。可达到的帧率ff通常在hz范围内,在各实施例中,帧率例如在5hz和50hz之间。帧率通常受cmos检测器的速度的限制,并且通常还受到眼睛安全法规的限制。
100.用于生成离散光斑图案的投影仪,概述
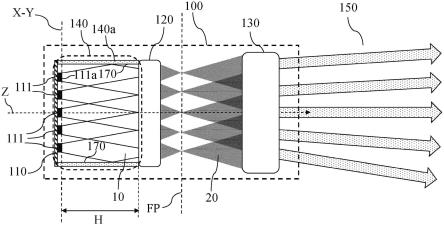
101.用于根据本公开的固态lidar系统1的投影仪100的实施例在图14a上示意性地示出,并且在图5上进一步更详细地示出。投影仪100包括激光器阵列110,例如一维或二维激光器阵列110、混合室140、整形光学系统120和投影仪透镜系统130。
102.混合室应被解释为中空三维体。在图5中,虚线轮廓表示混合室140,而混合室的周向壁被表示为附图标记140a。混合室140的实施例示例如图17a和图17b所示,并在下文将进一步讨论。图14b至图14h示出了根据本公开的包括附加组件的投影仪的其他实施例,并在下文也将进一步讨论。
103.激光器阵列110包括多个离散固态激光源111。在各实施例中,固态激光源111是半导体激光器,诸如举例而言vcsel半导体激光器。
104.在如图5所示的实施例中,固态激光源通常具有位于该阵列的发射平面x-y中的发射表面111a。激光器阵列110可操作以使得每个激光源同时发射第一激光束10,该第一激光束10在平行于投影仪的主光轴z的方向上发散。在图5所示的这一示例性实施例中,投影仪的主光轴z垂直于发射平面x-y。以此方式,获得了多个平行的第一激光束,它们在平行于主光轴的方向上传播。
105.在其他实施例中,每个固态激光源的发射表面不一定垂直于投影仪的主光轴z。在各实施例中,激光器阵列可以例如形成在通常弯曲的基板表面上,由此各个体激光束的相应方向不严格地彼此平行,而是在不同程度上偏离平均光轴。
106.在各实施例中,诸第一激光束是连续波激光束。在其他实施例中,诸第一激光束是脉冲式的,并且其中由固态激光源发射的每个脉冲式第一激光束包括具有时间脉宽pw的第一脉冲的时间序列。混合室140沿主光轴z延伸,并被配置成接收并允许每个第一激光束10在平行于主光轴z的方向上传播,直到每个第一激光束的至少一部分光线与相邻第一激光束的光线交叠。实际上,由于固态激光源发射的第一束激光是发散光束,例如发散角在5
°
和15
°
之间,所以诸第一束激光在混合室内传播了给定距离后将开始交叠。交叠应解释为在空间上交叠。
107.在各实施例中,诸第一激光束的发散角等于或小于25
°
。
108.通过使用如上所述的混合室并允许激光束的光线与来自相邻激光束的光线交叠,每个个体激光源的相干激光与来自多个其他激光源的相干激光混合。以此方式,诸第一激光束的混合将造成入射到整形光学系统120上的光的相干性降低,并且形成由投影仪透镜系统130发射的光斑图案的第二激光束的相干性将降低。
109.混合室具有沿主光轴z测量的长度h。混合室的长度越长,每个激光束的光线将与其他激光束的光线相互混合得越多。
110.在各实施例中,混合室的长度h被确定为使得在第一激光束传播通过混合室之后,每个第一激光束的光线的20%或更多、优选40%或更多、更优选60%或更多与相邻第一激光束的光线交叠。在其他实施例中,在传播通过混合室之后,每个第一激光束的激光的100%与相邻第一激光束交叠。
111.本领域技术人员将根据创建均匀功率场以创建均匀光斑图案所需的混合量来定义混合室的长度h。同时,为了使散斑对空间准确度的影响最小化,激光的相干性被显著降低。在确定长度h时,还应考虑lidar系统应保持紧凑。本领域技术人员例如可以遵循迭代过程来确定通过修改长度h所需的交叠激光的量,从而达到足够的混合量。下文将进一步详细讨论如何确定混合室的最佳长度h的其他示例。
112.整形光学系统120位于混合室140和投影仪透镜系统130之间。整形光学系统被配置成接收从混合室140出射的第一激光束10的交叠光线,并用于重新聚焦交叠光线以形成多个离散的第二激光束20。这些第二激光束20形成离散光斑图案150。离散激光束必须被解释为在空间上分开的光束。在其中第一激光束是脉冲激光束的实施例中,第二激光束也是脉冲激光束,并且每个脉冲式第二激光束包括具有时间脉宽pw的第二脉冲的时间序列。实际上,第二激光束仍然具有与第一脉冲激光束相同的时间脉宽pw,因为混合室或整形光学系统都没有改变激光束的时间脉宽。此外,第二脉冲激光束的频率与第一脉冲激光束的频率相同。实际上,混合室只允许第一激光束沿着与混合室的长度相对应的给定距离发散。
113.然而,在各实施例中,如果整形光学系统形成的第二激光束的数量低于第一激光束的数量,则整形光学系统120可以改变(在与第一光束的强度相比时)第二光束的强度。
114.在一些其他实施例中,整形光学系统产生具有比第一激光束更低的强度的第二激光束。
115.图3涉及具有脉冲式第一和第二激光束的实施例。在图3中,示意性地示出了形成脉冲式第二激光束的脉冲11的时间序列的示例。此类脉冲的时间序列也被称为脉冲链(train)50。在这一解说性示例中,仅示出了5个脉冲,但实际上,脉冲链中的脉冲数通常要大得多。例如,在一些实施例中,脉冲链中的脉冲数在50到500个脉冲之间。这些脉冲通常是块脉冲。脉冲11的时间脉宽pw和脉冲周期p
p
与脉冲频率f
p
成反比,如图3所示。序列中的脉冲数可以取决于各种因素,诸如举例而言,出于眼睛安全的原因每个脉冲的振幅可能会受到限制,和/或脉冲数可被定义成获得足够的信噪比来检测反射激光。
116.在各实施例中,固态lidar系统1的控制器200被配置成控制激光器阵列110,以使得多个离散的固态激光源中的每一者以脉冲频率f
p
发射第一脉冲,使得f
p
≤1/(tof
max
pw),其中pw是以上定义的时间脉宽,且tof
max
是需确定的预定义最大距离d
max
的最大飞行时间。这一最大距离d
max
可以解释为固态lidar系统的最大工作范围,它定义了场景中的最大距离,直至该最大距离仍然可以检测到对象并确定距离。该最大距离d
max
例如可以是50到500
米之间的值。将f
p
定义为等于或低于上述定义的最大脉冲频率可确保当发射给定脉冲时,时间序列的下一脉冲仅在位于最大距离d
max
处的对象反射的前一脉冲在距离选通多像素检测器中被检测到时才发射。这避免了称为混叠(aliasing)的问题。
117.在各实施例中,如图3所示,脉冲链50的脉冲频率f
p
通常在khz范围内,例如在10khz和500khz之间。
118.如上所述,投影仪100还包括投影仪透镜系统130。投影仪透镜系统130是包括一个或多个光学透镜的光学系统,该光学透镜被配置成接收形成离散光斑图案的第二激光束并将由第二激光束形成的该照明图案150投影到场景99。
119.在现有技术系统中,诸如wo2017/068199中描述的lidar系统,投影仪透镜系统是复杂、自定义且昂贵的透镜系统。事实上,简单的投影仪透镜不能被使用,因为单个透镜通常没有平坦的焦平面,即众所周知的petzval场曲率。其结果是,当投影仪透镜系统将光斑图案投影到场景中时,光斑图案的并非所有光斑都在无穷远处聚焦。因此,需要对这种非平面焦平面进行校正。
120.当与wo2017/068199的投影仪系统相比时,根据本公开的投影仪的投影仪透镜系统130被简化,因为整形光学系统120可以被设计成其焦平面是弯曲的并且与投影仪透镜系统130的弯曲焦平面重合。通过这种方式,可以使用简单的投影仪透镜来投影光图案。实际上,由于整形光学系统120提供了弯曲焦平面,因此不需要进一步的校正透镜。结果,投影仪透镜系统130沿主光轴z的长度被减小。因此,这种减小可以补偿或部分补偿由于添加混合室而增加的投影仪长度。在各实施例中,还减小了投影仪透镜在垂直于x-y平面的平面中的大小,这将在下文中进一步讨论。下面将进一步讨论与现有技术投影仪透镜系统相比时,根据本公开的投影仪透镜系统130如何被简化。
121.在各实施例中,混合室内壁的至少一部分是用于反射激光的反射壁170,使得延伸出混合室周界的激光被反射回混合室,如图5和图8示意性地解说的。
122.实际上,取决于光源的发散角和混合室的长度h,阵列的外围光源发出的光可能会击中反射壁并在混合室中反射回来。反射壁进一步有助于在第一激光束的混合后,在垂直于主光轴的平面上获得均匀的光分布,这将进一步详细讨论。
123.为了形成反射壁170,本领域技术人员可以选择例如平滑且反光的材料,以便反射激光。在各实施例中,混合室140内壁的至少一部分包括用于反射激光的镜。
124.在一些实施例中,与漫反射相对比,混合室的反射壁被配置成镜面反射。
125.在根据本公开的进一步实施例中,一个或多个光学激光反射元件位于混合室内以用于延伸第一激光束的行进路径。以此方式,混合室的长度h可被减小,同时保持第一激光束的充分混合。
126.微透镜阵列
127.在各实施例中,整形光学系统120包括包含多个微透镜ml[i]的第一微透镜阵列121。第一微透镜阵列121也在图14a至图14h上用附图标记121示出。例如,在图7中示出了解说第一微透镜阵列121的三个微透镜ml[1]、ml[2]和ml[3]的截面图。每个微透镜都有自己的适当光轴。这些多个微透镜中的每一者被配置成形成相关联的第二激光束。因此,微透镜的数量定义所形成的第二激光束的数量,并且因此定义离散光斑图案中的光斑的数量。
[0128]
微透镜阵列(缩写为mla)被理解为覆盖小型化的个体光学元件(例如透镜)的阵
列,由此个体光学元件的尺寸的数量级通常在微米到毫米范围内。
[0129]
如上所述,离散光斑图案中的光斑的数量通常在10000到100000之间。在各实施例中,离散光斑的数量例如约为20000,并且因此在这些实施例中,第一微透镜阵列的微透镜的数量为20000。
[0130]
在各实施例中,微透镜的单个元件大小约为79微米,并且由微透镜形成的投影光斑约为15微米。
[0131]
在一些实施例中,第一微透镜阵列的微透镜的数量等于激光源的数量,而在其他实施例中,第一微透镜阵列的微透镜的数量低于激光源的数量,使得第二光束的脉冲强度大于第一光束的脉冲强度。
[0132]
其中激光源的数量大于第一mla的微透镜的数量的实施例具有许多优点。事实上,不仅投射到场景上的每个光束的功率增加了,而且个体激光源故障的负面影响也被降低。
[0133]
在各实施例中,mla的每个微透镜具有六边形形状。使用这种类型的微透镜配置,可以达到约95%的效率,即当从第一激光束转换到第二激光束时,仅损失5%的激光。
[0134]
微透镜阵列可以使用本领域已知的光刻工艺在基板上形成。此类工艺能够制造微透镜阵列,其中微透镜的直径是微米量级,例如直径在30微米和100微米之间,并且焦点在30微米和100微米之间的范围中。在一些实施例中,如图11所示,第一微透镜阵列121的个体微透镜ml[i]的光轴zi与主光轴z平行。在其他实施例中,例如如图9和图10所示,微透镜ml[i]的光轴不一定与主光轴z平行,下文将进一步讨论。
[0135]
在各实施例中,微透镜阵列还被适配成校正上述光学问题,即光学透镜的焦平面不是平坦的而是弯曲的,这一事实称为petzval场曲率。事实上,如果投影仪透镜系统有弯曲焦平面而不是平坦平面,其结果是,光斑图案的所投影的光斑并非全部聚焦在无穷远处,而是只有部分光斑聚焦。因此,并非所有光斑具有每表面积最大强度。一般而言,中心光斑是聚焦的,而外部光斑是失焦的。在现有技术的lidar系统中,为了补救这一问题,投影仪透镜系统除了物镜之外还包括一个或多个附加的校正透镜,以校正这些光学像差。这使得投影仪更昂贵、更大、且更复杂。
[0136]
在各实施例中,如图8示意性地所示,第一微透镜阵列121被配置成使得每个微透镜ml[i]包括位于平面fp上的焦点rfp[i],更准确地说是后焦点,并且其中平面fp位于微透镜阵列121和投影仪透镜系统130之间。
[0137]
在根据本公开的其他实施例中,微透镜阵列被配置成使得每个微透镜包括位于曲面cfp(而不是如图8所示的平面)上的焦点,更确切而言是后焦点rfp[i]。曲面cfp如图9至图11所示。这一曲面cfp对应于投影仪的虚拟成像面。更具体而言,该曲面对应于投影仪透镜系统的弯曲焦平面,更确切而言弯曲前焦平面。换言之,微透镜阵列具有与投影仪透镜系统的弯曲前焦平面重合的弯曲后焦平面。以此方式,通过提供具有弯曲焦平面的微透镜阵列,当与例如wo2017/068199中公开的投影仪透镜系统(该投影仪透镜系统需要各种附加校正透镜来校正投影仪透镜的petzval曲率)相比时,投影仪100的投影仪透镜系统130可以被大大简化。
[0138]
在各实施例中,弯曲焦平面cfp对应于投影仪透镜系统130的弯曲焦平面。
[0139]
在图11所示的实施例中,如上所述,个体微透镜ml[i]的光轴zi与主光轴z平行。
[0140]
另一方面,对于图9和图10所示的实施例,微透镜ml[i]的至少一部分具有不与主
光轴z平行的光轴zi。有利地,对于这些实施例,当与每个微透镜的光轴zi都与主光轴平行的实施例相比时,投影仪透镜系统130的大小,即在垂直于主光轴z的平面中的大小,可以减小。例如,如果投影仪透镜系统130由标准投影仪透镜形成,则投影仪透镜的直径可以减小。
[0141]
半导体激光源
[0142]
在各实施例中,激光器阵列110由一个或多个vcsel(垂直腔面发射激光器)芯片形成,其中每个vcsel芯片包括激光发射器的阵列。这些激光发射器中的每一者都被解释为个体固态光源。.vcsel发射器是半导体激光二极管的类型,其激光束发射垂直于vcsel芯片的顶表面,该顶表面形成发射表面111a。vcsel发射器的发射表面通常是圆形且具有在微米范围内的直径,例如直径在10微米到25微米之间。当形成vcsel发射器阵列时,个体vcsel发射器由vcsel间距隔开,该间距通常在10微米到60微米之间。通过组合多个(例如数百到数千个)vcsel发射器,形成一维或二维激光器阵列。
[0143]
从vcsel激光器的发射表面发射的激光具有定义为半开角的发散角θ
vcsel
,其通常在3
°
和15
°
之间,即激光束的开角或全宽在6
°
和30
°
之间。实际上,激光源发出的激光应尽可能小,以保持照亮场景的离散光斑。vcsel发射器的发散角θ
vcsel
在图12示意性地示出,并且被示为激光束的半开角或半宽。激光束的发散角或宽度的值通常表示为1/e2值。
[0144]
为了选择合适的发散角θ
vcsel
,需要做出折中。一方面,发散角应尽可能低以获得小的光束光斑,而另一方面,发散角不应太小以使混合室的长度h不会变得太长。在各实施例中,vscel被选择成使得发散角θ
vcsel
在3
°
和15
°
之间的范围中。在各实施例中,发散角θ
vcsel
是10
°
。
[0145]
在根据本公开的特定实施例中,固态激光源以贴片(tile)的形式被编组,以便例如形成一维或二维贴片阵列。贴片可以解释为固态激光源的子阵列。形成贴片ti的每个子阵列包括与贴片ti相关联的数量sti个固态激光源,使得激光器阵列的固态激光源的总数st表示为:
[0146][0147]
其中nt是激光器阵列的贴片的总数。
[0148]
此类贴片的实现示例是包括多个激光发射器的vcsel芯片,其中每个激光发射器对应于固态激光源。因此,在这些实施例中,贴片ti通常被命名为vcsel贴片。每个vcsel贴片可以例如包括500到2000个vcsel光源。
[0149]
在各实施例中,为了形成激光器阵列110,多个vcsel贴片可以按行和列排列,以便形成二维贴片阵列。例如,矩形二维激光器阵列110可以由n行和m列vcsel贴片形成,其中n和m≥2。贴片的大小通常在毫米范围内。贴片可具有例如2mm x 2mm或1mm x 1mm的尺寸。这些类型的vcsel贴片可在市场上买到。注意,二维阵列110的贴片不一定需要具有相同的形状或具有相同数量的vcsel源。
[0150]
由贴片形成的vcsel阵列的各贴片通过贴片间间距彼此分开。贴片间间距在毫米范围内。在各实施例中,贴片间间距等于或大于0.3毫米,优选地等于或大于0.5毫米。
[0151]
对于每个贴片,vcsel间间距等于或低于0.1毫米,优选地等于或小于0.05毫米。
[0152]
在各实施例中,vcsel间间距在10微米到30微米之间的范围中。
[0153]
包含贴片的vcsel阵列的贴片可布置在平面或曲面上。
[0154]
在贴片具有矩形形状且贴片被布置成形成规则vcsel图案的实施例中,对于整个二维激光器阵列110,贴片间的距离是相同的。在各实施例中,激光器阵列110是前端vcsel阵列,如图12示意性地示出的。前端vcsel阵列是其中vcsel激光源111发射的激光不穿过基板70的阵列。
[0155]
图12示出了投影仪的实施例的一部分,其中微透镜阵列121位于激光器阵列110的下游。该微透镜阵列121对应于上文讨论的第一微透镜阵列121,其被配置成生成用于形成离散光斑图案的第二激光束。
[0156]
在其他实施例中,激光器阵列110是后端vcsel阵列,如图13示意性地示出的。后端vcsel阵列是其中vcsel激光源111发射的激光穿过基板70的阵列。在优选实施例中,后端vcsel阵列包括第二微透镜阵列122,也称为vcsel微透镜阵列,其包括配置成减小每个vcsel的发散角θ
vcsel
的微透镜ml
vcsel
[i]。此类第二微透镜阵列例如被蚀刻在vcsel阵列110的基板70中。为了能够使用后端vcsel阵列,基板70需要对激光透明。目前可用的后端vcsel阵列例如对于940纳米的激光是透明的。如图13所示,除了位于第二微透镜阵列122下游的第一微透镜阵列121之外,包括微透镜ml
vcsel
[i]的第二微透镜阵列可被解释为投影仪的第二微透镜阵列122。
[0157]
在进一步的实施例中,vcsel阵列是多堆叠类型。
[0158]
混合室
[0159]
如上所述,混合室140在激光器阵列110和整形光学系统120之间延伸,并且具有沿主光轴测量的长度h。
[0160]
在图17和图17b中,示意性地示出了混合室140的两个实施例示例。沿主光轴z延伸的混合室140必须解释为三维中空体。混合室140包括用于接收未混合激光的入口面160a、用于出射经混合激光的相对出口面160b和用于形成中空体的周向侧140a。混合室的周向侧140a应被解释为混合室的壁。
[0161]
在一些实施例中,如图17a所示,混合室140具有长方体的形状,其中长方体的四个侧壁形成混合室的周向侧140a。在图17b中,混合室140的示例被示为具有截锥体形状,其中入口面160a的表面小于出口面160b的表面。在图17a和图17b中,形成混合室的周向侧140a被示为带阴影的表面。
[0162]
通常,激光器阵列110位于混合室的入口面,而整形光学系统(诸如第一微透镜阵列121)位于混合室的出口面。
[0163]
在各实施例中,混合室被配置成将激光器阵列机械耦合到混合室的入口面和/或将整形光学系统机械耦合到混合室的出口面。以此方式,混合室还形成用于激光器阵列和/或整形光学系统的支撑结构。在各实施例中,混合室被配置成支撑其他元件。
[0164]
换言之,混合室140形成在生成第一激光束的激光器阵列和整形光学系统之间的区域。该区域可以解释为第一激光束在其中进行混合的腔。
[0165]
如上所述,在根据本公开的投影仪的实施例中,混合室140的内壁的至少一部分,即混合室140的周向侧140a的内侧的一部分,包括用于反射激光的一个或多个反射壁170。
[0166]
在各实施例中,混合室由例如适于反射激光的塑料材料制成。
[0167]
在其他实施例中,周向侧140a的内部由第一材料制成,而周向侧的外部由不同于
第一材料的第二材料制成。第一材料随后被选择成激光反射材料,使得周向侧140a的内侧形成用于反射激光的反射壁170。
[0168]
混合室的反射壁产生均匀的光斑图案,换言之,光斑图案的周界处的光斑与位于光斑图案中心部分的光斑具有相同的强度。
[0169]
在如图14a所示的一些实施例中,混合室140可以是空的,即不包含与发散的第一光束相干扰的任何附加装置。在如图14b至图14f所示的其他实施例中,混合室140可包括附加元件,诸如举例而言第二微透镜阵列122、漫射器145、环行器146、布拉格体积光栅147和/或扩束器148。这些附加元件通常是可以影响第一光束的混合的元件。下面将进一步讨论包含此类附加元件的这些各种实施例。在包括这些附加元件中的一者或多者的这些实施例中,混合室被配置成支撑这些附加元件,并且因此也形成用于这些附加元件的支撑结构。
[0170]
形成镜腔(即具有内反射壁的混合室)的主要优点是,光线受到约束,并且通常存在于vcsel贴片或贴片阵列的侧边处的不规则性不存在了。由于混合室的存在,投影系统所产生的光斑图案是均匀的,使得光斑图案的周界处的光斑与光斑图案中心区域的光斑具有相同的强度。混合室的另一优点是可以保护vcsel阵列免受污染。在各实施例中,混合室是气密的,使得在投影仪内避免例如热源的湍流。
[0171]
有利地,在各实施例中,混合室可填充惰性气体,以避免位于混合室内的部件老化或降级。
[0172]
在一些实施例中,反射壁170不垂直于vcsel阵列110的平面,例如当混合室170具有如图17b所示的截锥体形状时的情况。如此,镜腔的反射壁170可以被定向成减小光束的发散角,这例如增加了使用本投影仪照明场景的lidar系统的范围和/或精准度。除了投影仪的其他部件之外,镜腔可以实现该功能,并且可选地,镜腔可以替代第二mla 122的使用,如下所述。
[0173]
混合室需要足够长,以使第一激光束的激光充分混合。一般而言,与发射平面x-y平行的混合平面pm被如下定义:其中第一激光束的光线交叠到光变得均匀地分布的程度。均匀光分布应解释为穿过混合平面pm的光强基本平坦的分布。混合室的长度h通常被定义为使得混合平面pm位于混合室的末端或在整形光学系统120的入口处。如果整形光学系统包括微透镜阵列,则混合平面可位于微透镜阵列的正前方。
[0174]
另一方面,混合室140的长度h也应尽可能短,以保持紧凑的lidar设备。在图6中,混合平面pm被示为位于混合室的末端。
[0175]
当使用贴片作为光源时,沿主光轴z测量的混合室的长度h被定义成使得在第一激光束传播通过混合室之后,对于每个贴片,其至少一部分光线与相邻贴片的光线交叠。交叠应解释为在空间上交叠。在各实施例中,每个贴片的激光的至少20%或更多、优选40%或更多、更优选60%或更多的光线与相邻贴片的光线交叠。在其他实施例中,每个贴片的激光的100%与相邻贴片的光线交叠。下面给出了在使用贴片时确定混合室的长度的最佳距离的办法。如图6示意性地示出的,混合室140的最小长度h可通过以下公式确定:
[0176][0177]
其中δ是两个相邻贴片的中心之间的距离,θ是vcsel激光源的光束发散角,且l是
矩形贴片的一边的长度。例如,如果δ=2.5mm,l=2mm且θ=10
°
,则h≥8.5mm。在图3上,示出了其中光源是vcsel阵列的贴片的实施例。
[0178]
在其他实施例中,如果没有使用贴片但光源例如由形成规则矩阵的多个个体vcsel形成,则可以应用上述公式来确定混合室140所需的最小距离h。对于没有使用贴片的这些实施例,距离δ在这一情形中是两个相邻vcsel激光源的中心之间的距离,例如50微米,且l则是个体vcsel的圆形发射表面的直径,例如15微米。如果没有使用贴片,在第一激光束之间有足够的空间交叠所需的最小距离h要短得多。
[0179]
包括来自多个第一激光束的光线的第二激光束20的形成在图7上示意性地解说。在该说明性示例中,微透镜ml[2]接收来自第一激光束10a、10b和10c的光线的一部分。微透镜ml[2]具有焦距f,并将透射穿过微透镜ml[2]的光线聚焦在焦平面fp中,以形成由第一激光束10a、10b和10c的光线部分组成的第二激光束20。在微透镜ml[2]的焦平面fp上,光斑的图像被观察到与具有光斑宽度w和发散角θ
spot
的经组成第二激光束20相对应。如图7所示,第二激光束20在焦平面20中的宽度w可通过以下公式来找出:tan(θ
vcsel
)=w/(2x f),其中θ
vcsel
是第一激光束10a、10b、10c的发散角。第二激光束20的发散角θ
spot
可通过以下公式找出:tan(θ
spot
)=((w p)/(2x f)),其中p是两个相邻微透镜的中心之间的距离。在图7中,仅示出了基于多个第一激光束形成第二激光束的原理的示意图,在实践中,用于形成第二激光束的交叠第一激光束的数量通常更大。
[0180]
在图8中,示出了根据本公开的投影仪100的实施例的截面图,其中投影仪包括由多个vcsel贴片t[i]形成的激光器阵列110,例如二维激光器阵列。每个vcsel贴片包括产生诸第一激光束10的多个vcsel激光器。在该示例中,来自不同贴片t[i]的多个第一激光束10在传播通过混合室140时被混合。微透镜阵列121通过截获交叠光线并将其重新聚焦到焦平面fp来最终形成第二激光束,焦平面fp是微透镜阵列的每个微透镜的公共焦平面。第二激光束聚焦到焦平面fp在图8示意性地示出。
[0181]
如上所述,获得足够大的vcsel阵列的优选方法是将多个vcsel贴片组合成更大的阵列。较小的vcsel贴片具有比较大贴片更高的产率,这导致更高效的制造过程和更低的相关成本。将此类贴片组装成vcsel阵列后,使得的贴片间距离通常会大于贴片内的vcsel间距离。这些“接缝”导致投影仪的视野fov中出现照明较少的光带。显然,vcsel阵列和第一mla之间的距离h可被选择成使得相邻贴片的光束混合,从而造成入射到第一mla 110的更均匀的功率场和更均匀的场景照明。以此方式,在不牺牲所投影的图案的均匀性的情况下,可以降低投影仪的成本和/或增加其大小。
[0182]
使用更小的贴片和更大的贴片间距离的可能性的另一效果是,可获得每贴片以及因此每vcsel的更大功率预算,而没有进入热约束。与个体vcsel产生的光束相比,每vcsel的经增加功率增加了投射到场景中的每光束的功率,这例如增加了反射回lidar系统的检测器的激光量(即光子数)。由于lidar系统的范围和/或精准度在很大程度上取决于测量中的泊松噪声,并且因为泊松噪声会随着反射回的光子数量的增加而减小,所以所述视差和由此得到的每光束的经增加功率例如增加了使用本投影仪来照明场景的lidar系统的范围和/或精准度。
[0183]
具有两个微透镜阵列的投影仪
[0184]
在如图14b所示的本公开的实施例中,投影仪包括用于减小由固态激光源(111)发
射的第一激光束的发散角的第二微透镜阵列122。第二微透镜阵列通常布置在激光器阵列110和第一微透镜阵列121之间。在各实施例中,第二微透镜阵列被配置成限制第一激光束的发散角,例如限制到5
°
的最大发散角。另一方面,由于混合室的目的是使诸第一激光束交叠,因此需要在将发散角限制在给定最大值和在第二微透镜阵列上获得均匀光分布所需的混合量之间进行折衷,以生成对所有第二激光束而言具有均匀辐照度的第二激光束。
[0185]
具有两个微透镜阵列的投影仪实施例保留了如图14a所示的仅包括第一微透镜阵列121的上述实施例的所有特征。第二微透镜阵列122位于激光器阵列110的发射侧和第一微透镜阵列121之间。优选地,第二mla 122包含与vcsel阵列110中的vcsel的数量(即激光发射器的总数)相等或更少数量的微透镜。优选地,第二mla 122被设计成减小vcsel阵列110中的各个体激光器发射的光束的发散度。在一些实施例中,激光器阵列包括多个vcsel芯片,其中每个vcsel芯片包括多个激光发射器。vcsel芯片的激光发射器将被解释为固态激光源,并且vcsel芯片是上述vcsel贴片的实现示例。
[0186]
在其中激光器阵列110包括多个vcsel芯片的实施例中,其中每个vcsel芯片包括多个激光发射器,第二微透镜阵列122中的微透镜的数量等于或小于激光器阵列的发射器的总数。发射器的总数是激光器阵列中的每个vcsel芯片中的所有发射器的总和。
[0187]
在其中第二mla的微透镜与相应vcsel的光轴对准的一些实施例中,其中在严格平坦vcsel阵列的情况下光轴可以平行,第二mla 122在没有破坏光束的情况下减小vcsel阵列所发射的光束的发散度。这在图15a上示意性地示出。所得的激光束发散度的减小增加了入射到第一mla 121上的第一光束的辐照度,并且因此投影仪透镜130所接收的第二光束也具有经增加的辐照度。结果,由投影仪投射到场景上的光束的角辐照度降低,这例如增加了使用本投影仪来照明场景的lidar系统的范围和/或精准度。
[0188]
在各实施例中,第二mla 122和第一mla 121之间的距离可以改变,并且这种距离变化将影响激光束到达第一mla 121之前在它们之间发生的混合量。
[0189]
在其中第二mla的微透镜没有与个体vcsel的相应光轴完美对准的替换实施例中,第二mla 122可减小vcsel阵列110发射的光束的发散度,同时也破坏光束。换言之,存在漫射器效应,从而增加了第一光束的角混合。这在图15b上示意性地示出。这一漫射器效应增加了光束的混合,并且因此提高了入射到第一mla 121上的场的均匀性。这可造成投影在场景上的更均匀的光斑图案,和/或使得在不负面影响光斑图案的均匀性的情况下减小第一mla 121和vcsel阵列110之间的距离成为可能。在非完美对准的情形中,第二mla 122的存在例如可以提高使用本投影仪的lidar系统的准确度和精准度/范围。
[0190]
如上所述,对于激光器阵列110是后端vcsel阵列的实施例,如图13示意性地示出的,此类第二微透镜阵列122例如被蚀刻在vcsel阵列110的基板70中并配置成减小每个vcsel的发散角θ
vcsel
。
[0191]
在一些实施例中,代替使用第二mla来减小激光束的发散角,改为使用一个或多个棱镜来减小激光束的发散角。
[0192]
具有漫射器的投影仪
[0193]
图14c示意性地示出了根据本公开的固态投影仪的另一示例。为清楚起见且不失一般性,该实施例保留了如图14b所示的实施例的所有特征,并且另外包括第一mla 121和第二mla 122之间的单独漫射器145。这不应被解释为排除缺少第二mla 120的实施例。
[0194]
如图14c所示,漫射器145被包括在混合室140内,并且优选地在这些实施例中,混合室140被配置成支撑漫射器145。
[0195]
在包括第二mla 122的一些实施例中,漫射器145可被定位成更靠近第二mla 122,而在如图14c示意性地示出的其他实施例中,漫射器145可被定位成更远离第二mla 122。
[0196]
在一些实施例中,漫射器被附连到第二mla 122。在各实施例中,漫射器或漫射器功能成为第二mla 122的组成部分。漫射器是通过衍射和折射来散射光的光学元件,目的是均匀地分布来自vcsel光源的光。它使光均匀化,从而具有与角度和/或位置无关的辐射度,并且因此入射到第一mla上的光具有更均匀的特性,以在第一mla后创建均匀的光斑图案。
[0197]
漫射器通常由在感兴趣的波长处具有不同的光学折射率的两种材料之间的图案化表面制成。优选地,使用高折射率对比度且易于制造的材料,例如可模塑材料。例如,可以使用以下非限制性材料组合:玻璃/空气、塑料/空气、algaas/空气、环氧树脂/空气、模压固化液晶、环氧树脂/环氧树脂、塑料/塑料。在各实施例中,使用胶体悬浊液,诸如举例而言组合:玻璃/液体。
[0198]
它的工作原理是基于不同光学材料的边缘处的折射和衍射特性来漫射光。该界面通常是非周期性的,以避免固定图案,并且因此漫射是半随机的,优选地与偏振无关且是充分的。
[0199]
在图19中,示出了一实施例,其中从第二mla 122发出的激光穿过漫射器145,并且示意性地示出了因穿过漫射器而得到的激光的混合。
[0200]
漫射器145增加角度光束混合,从而造成入射在第一mla 121上的更均匀的场。因此,漫射器能够在不负面地影响投影仪所投影的光斑图案的均匀性的情况下,减小第一mla 121和第二mla 122之间的距离。然而,角光束混合的增加将导致投影仪的角辐照度降低。
[0201]
由于各个体vcsel发射的波长存在小的变化,因此漫射器145不仅提供光束的角度混合,而且还提供波长混合。波长混合会增加所投射的光斑图案的波长光谱,从而降低其相干性。这种相干性的降低减少了投影中散斑图案的存在,从而例如提高了使用本投影仪来照明场景的lidar系统的准确度。然而,由于lidar的检测器侧必须存在窄带滤光器,因此宽波长光谱对此类lidar仪器的范围和/或精准度有不利影响。
[0202]
本领域技术人员将明白,需要根据第一mla 121、第二mla 122(如果存在的话)和vcsel阵列110的vcsel的特性来调谐漫射器,以实现所投射的光斑图案的角辐照度、所投射的光斑图案的均匀性、以及所投射的光斑图案的波长光谱以及光学堆叠的厚度之间的平衡。
[0203]
具有环行器的投影仪
[0204]
根据本公开的投影仪的另一实施在图14d中示出。为清楚起见且不失一般性,该实施例保留了来自图14c的实施例的所有特征,并且另外包括光学环行器146。这不应被解释为排除缺少第二mla 122或漫射器145的实施例。
[0205]
在一些实施例中,如上所述与漫射器145混合是不够的,并且优选地与上述漫射器组合使用另一光学元件,即环行器146。
[0206]
如图14d所示,环行器146被包括在混合室140内,并且优选地在包括环行器的实施例中,混合室140被配置成支撑环行器146。
[0207]
环行器146的目的是提供空间光束混合。优选地,环行器放置在vcsel阵列110和漫
射器145之间,或者对于包括第二mla 122的实施例而言,放置在第二mla 122和漫射器145之间。在该位置,光束角度通常小于它在漫射器145和第一mla 121之间的角度。这可能会导致更多的空间混合,并使得能够使用更薄的环行器来获得相同的效率。所提供的空间混合造成入射到第一mla 121上的更均匀的场,并且因此造成投影到场景上的更均匀的光斑图案,这例如增加了使用本投影仪来照明场景的lidar系统的准确度。由于使用漫射器和环行器的经增强混合,所得的激光更加不相干,使得散斑噪声被进一步降低。
[0208]
环行器通过使入射的vcsel光线例如通过一种半透明/半反射元件部分地衍射/弯曲(优选地90
°
)并部分地透射的原理来增加vcsel光线的空间混合。根据其工作原理,环行器使vcsel光线从入射位置部分地传播到下一更远位置并在该更远位置部分处退出环行器。这进一步增加了vcsel光束的空间混合,从而改善了入射到mla1的光的均匀性。
[0209]
环行器通常由例如塑料或玻璃制成,并且具有包括在光路中的多个半反射/半透明镜组件。在透射光和反射光之间存在固定的分布。其工作原理是基于部分地反射入射光线并使其部分地透过。反射的类型取决于材料的选择:例如,受抑全内反射、归因于两种光学介质的部分反射、金属反射、偏振分束器。透射和反射的比率由放置在光线光路中的反射组件的透明度决定。
[0210]
在底层和顶层涂覆针对所使用的波长光谱的抗反射涂层是优选且有利的。
[0211]
在图18中,示出了环行器146的实施例的示例。所示的环行器146包括透明镜146a,即对一定量而言透明的镜。例如20%和80%之间透明,例如50%透明。在图18中,示意性地示出了四个透明镜146a,并用虚线斜线示出。传入激光部分地穿过透明镜,且部分地在垂直于传入激光的方向上反射。被第一透明镜反射的激光将再次被相邻透明镜至少部分地反射,且因此作为原始传入激光再次被定向。以此方式,激光就在空间上混合。在图18中,传入激光、反射激光和透射激光用黑色箭头示意性地示出。
[0212]
具有布拉格体积光栅的投影仪
[0213]
根据本公开的投影仪的另一实施在图14e中示出。为清楚起见且不失一般性,所示实施例保留了来自图14d的实施例的所有特征,并且另外包括布拉格体积光栅147。这不应被解释为排除缺少第二mla 122或和/或漫射器145和/或环行器145的实施例。
[0214]
布拉格体积光栅是配置成减小诸第一激光束的波长散布的装置。
[0215]
优选地,布拉格体积光栅147放置在vcsel阵列110和漫射器145之间。布拉格体积光栅150例如由玻璃制成。
[0216]
布拉格体积光栅147将所发射的光的一部分衍射回vcsel阵列110,也称为自成像,从而通过光学注入锁定现象造成vcsel波长锁定。通常,vcsel阵列中的个体vcsel所发射的波长的散布是2-3nm。通过添加布拉格体积光栅147,该散布通常可减小一个数量级,至0.2-0.3nm。
[0217]
优选地,布拉格体积光栅被设计成使得不会导致光功率损失,vcsel的全功率应在较小的波长光谱中发射。
[0218]
波长散布的减小使得能够例如在使用本投影仪来照明场景的lidar系统的检测器中使用更窄带的滤光器,从而增加检测器的信噪比并因此增加所述lidar系统的范围和/或精准度。所发射的光束的较窄带宽的可能副作用是投影仪产生的散斑增多。
[0219]
布拉格体积光栅147使个体vcsel发射的光束的波长较少地依赖于vcsel的温度和
流过vcsel的电流。因此,光束脉冲期间的动态波长偏移被减小。这一减小例如使得能够在使用本投影仪来照明场景的lidar系统的检测器中使用更窄带的滤光器,从而增加所述lidar系统的范围和/或精准度。
[0220]
优选地,布拉格体积光栅147的设计使得其能够在空间上扫描vcsel阵列的波长,以使其与lidar系统的检测器侧的窄带滤光器的波长蓝移相匹配。另选地,该匹配可以通过将vcsel贴片作为波长的函数进行排序并将它们放置在vcsel阵列中的正确位置以便与窄带滤光器相匹配来执行。
[0221]
优选地,布拉格体积光栅147减小所发射光束的发散度。发散度的这一减小增加了投影仪系统的角辐照度,这例如增加了使用本投影仪来照明场景的lidar系统的范围和/或精准度。这一发散度减小的可能副作用是,入射在第一mla 121上的光束之间的角混合降低,并且投影仪所投射的光斑图案的均匀性相应降低。
[0222]
如图14e所示,布拉格体积光栅147被包括在混合室140内,并且优选地在这些实施例中,混合室140被配置成支撑布拉格体积光栅147。
[0223]
具有扩束器的投影仪
[0224]
根据本公开的投影仪的又一实施在图14f中示出,包括扩束器148。扩束器148是配置成改善入射在第一微透镜阵列上的光分布的均匀性的装置。如上所述,当激光器阵列110由形成多个子阵列的贴片组成时,扩束器148的使用尤其有用。图16a和16b中示出了扩束器148的详细实施例以及进一步的实施细节。
[0225]
为清楚起见且不失一般性,图14f上所示的实施例保留了来自图14e的实施例的所有特征,并且另外包括扩束器148。然而,这不应被解释为排除缺少第二mla 122或和/或漫射器145和/或环行器146和/或布拉格体积光栅147的实施例。
[0226]
扩束器要被解释为一种光学元件,其通过在光路中放置半透明组件来将激光弯曲/衍射到在空间上的不同位置,以及其他。这些组件部分地使入射激光透过且部分地将其弯曲90
°
以使其传播到另一位置,在该另一位置处入射激光离开该光学组件。
[0227]
扩束器的目标是创建入射在第一mla 121上的更均匀光场,更具体而言,其目的是在vcsel贴片的互连处产生经拉平的辐射,在互连处通常由于两个贴片之间的距离而显示出较低的辐射。
[0228]
扩束器通常由例如塑料和/或玻璃制成,并且作用于放置在光路中的半透明、半反射组件,或者可以通过正/负透镜级联实现。
[0229]
优选地,扩束器148放置在vcsel阵列110和第一mla 121之间,或者当存在布拉格体积光栅147时,放置在vcsel阵列110和布拉格体积光栅147之间。如上所述,扩束器148的目的是增加贴片间区域中的照明,从而造成入射到第一mla 121的更均匀的功率场,并且作为结果,场景的照明更均匀,这例如提高了使用本投影仪来照明场景的lidar系统的准确度。以此方式,在不牺牲所投射图案的均匀性的情况下,可以减小vcsel贴片的大小并且因此降低投影仪的价格和/或可增加vcsel贴片的数量并因此增大投影仪的大小。
[0230]
不失一般性,图16a和16b各自参考两个贴片100a和100b来解说了扩束器的工作原理,其中扩束器148用于填充本来因贴片之间存在接缝而出现的低强度间隙。本领域技术人员将明白,这些原理可应用于任何数量的贴片,包括以二维阵列排列的贴片,在这种情况下,它们用于填充由所得的接缝网格所形成的低强度区域。
[0231]
在如图16a所示的实施例中,扩束器148包括多个成角度的镜148a、148b、148c,这些镜与贴片表面成45
°
角。当源自贴片100a、100b的激光到达附图标记148a和148b所指示的镜时,激光以45
°
的角度反射,并且因此平行于贴片传播,直到到达附图标记148c所指示的另一镜。该另一镜148c将再次以45
°
的角度反射光,使得激光再次垂直于贴片100a、100b。图16a上的水平箭头指示在通过由附图标记148a和148b所示的镜进行反射后的激光。由于附图标记148c所示的镜位于两个贴片之间的区域,所以激光也将到达两个贴片之间的区域,并且因此贴片之间不会出现低强度间隙。
[0232]
在其他实施例中,扩束器包括对于每个贴片而言,与贴片表面平行的一对负l-和正l 透镜,如图16b所示。以此方式,激光首先被负透镜散焦并以此方式到达贴片间区域。此后,激光被正透镜重新聚焦,使得激光再次沿主轴z传播。
[0233]
如图14f所示,扩束器148被包括在混合室140内,并且优选地在包括扩束器148的这些实施例中,混合室140被配置成支撑扩束器。
[0234]
如图14g和图14h中,示出了投影仪100的其他实施例,其中混合室包括反射内壁170。以此方式,形成了镜腔。在图14g和图14h所示的示例中,投影仪100包括图14f中所示的投影仪的组件,然而在其他实施例中,投影仪可以包括图14a至图14f所示的任何投影仪的组件或其任何组合。
[0235]
具有检查孔的混合室
[0236]
在各实施例中,混合室140,更具体而言是周向侧140a,包括用于检查投影仪的操作的检查口。在图14h中,示出了一个实施例的示例,其中混合室的周向侧由反射壁170构成,并且其中提供了贯穿反射壁170的检查口180。以此方式,可以在使用时监视投影仪的操作。优选地,这些检查口180位于不同高度,例如位于特定光学组件的位置或在不同光学组件之间。不失一般性,图14h示出了此类检查口180的三个可能位置的示例。
[0237]
当提供检查口时,镜腔中的一些光将向检查口180传播,并且因此可以通过开口180在光学堆叠的不同层次上分析投影仪系统所发射的光。例如,可以使用位于检查口处的光学光电二极管190a或使用装载在光学腔外部pcb上的相机190b来进行该分析。
[0238]
检查口180具有操作人员监控所发射光束的质量的优点,其中所获得的信息可被用于评估光学堆叠中的个体组件的性能、诊断故障、安排维护或零件更换、或为控制系统提供反馈。
[0239]
距离选通检测技术,概述
[0240]
如上所述,在lidar系统的一些实施例中,用于检测反射激光的多像素检测器结合脉冲激光束应用距离选通检测技术,以用于确定到场景的对象的距离。这是不同于直接飞行时间技术的技术。距离选通技术必须被解释为其中作为时间的函数来检测并累积反射激光的检测技术。检测和累积通常在时间窗口中执行,并且距离选通技术使用至少两个连贯的时间窗口。如上所述,处理装置基于通过距离选通多像素检测器获得的所累积的反射激光来计算到场景中的一个或多个对象的距离。当将dtof技术与脉冲激光束结合应用时,使用几纳秒的脉宽,即脉宽比要测量的tof短得多。另一方面,当应用距离选通技术时,使用的脉宽要长得多,并且通常等于要测量的tof或是要测量的tof的数量级。例如,如果一个对象在100米的距离处,则光来回传播需要大约666纳秒。使用更宽的脉冲允许检测器在更长的时间区间内累积电荷。尽管固态激光束提供的功率比传统激光束小,但当应用足够的脉冲
重复时,使用基于cmos的检测器使用距离选通技术可以获得足够的信噪比。距离选通技术的示例是从wo2017/068199知悉的。用于距离选通技术的多像素检测器包括多个像素,所述多个像素被配置成通过对激光束的脉冲时间序列的所有脉冲,累积代表在第一预定时间窗口期间由场景反射的光的第一量的第一电荷量和代表在第二预定时间窗口期间由场景反射的光的第二量的第二电荷量,来为检测到的反射激光的每个光斑生成曝光值。第二预定时间窗口在顺序上出现在第一预定时间窗口之后。到场景的对象的距离是基于第一电荷量和第二电荷量计算的。在各实施例中,第一预定时间窗口和第二预定时间窗口的持续时间基本相等,并且等于形成照明图案的脉冲的脉宽pw。
[0241]
然而,根据本公开的投影仪的使用不限于特定距离选通技术,并且因此不限于wo2017/068199中公开的特定距离选通技术,实际上,使用作为时间函数来检测和累积反射激光的原理的其他距离选通技术也可以应用。
[0242]
距离选通检测技术,距离准确度
[0243]
在激光是脉冲式的实施例中,使用形成光斑图案的脉冲的时间序列来照明场景、反射激光的累积、电荷的读出以及基于所累积的电荷的距离计算通常被称为帧或帧测量。应用距离选通检测技术的lidar系统所能达到的空间准确度通常取决于单帧测量的精准度和用于确定平均目标距离所拍摄的帧数。事实上,当执行多帧测量时,在逐帧之间存在测得距离的散布。单帧测量的误差通常称为时间误差,即测量分布的西格玛值σ。因此,总是拍摄多个帧,并确定平均对象距离。以此方式,与单帧测量的误差相比,平均对象距离值的误差以因子来减小,其中nf是帧数。对于经完美校准的lidar设备,从多个帧获得的计算得到的平均距离等于标准偏差所确定的置信区间内的实际距离。
[0244]
这些系统(例如汽车应用)的可接受空间准确度是四西格玛置信区间,即4xσ
avg
,即在平均距离值的0.1%到0.5%之间。当在多次帧测量后确定的平均距离等于例如100m时,并且如果所获得的四西格玛置信区间等于0.2%,则所确定的100m的平均目标距离以99.99%的概率在 /-20cm的区间内等于实际距离。
[0245]
本公开至少部分地基于发明人的如下观察:尽管为降低或校正检测到的信号来免于噪声贡献(例如来自环境光的背景噪声、像素噪声或由例如tof响应时间产生的噪声)而付出了巨大努力,但使用wo2017/068199中描述的lidar系统获得的空间准确度小于理论上预期的准确度,即发现例如与实际距离相等的平均所确定距离在99.99%的置信区间内。即使在进行足够多次的距离测量以降低泊松噪声后,还观察到测得的平均距离仍然与实际距离不同,其不同的量远远大于预期的空间准确度。发明人对wo2017/068199中所述的固态lidar系统执行的多个测试的分析使发明人认识到,在对已知系统噪声元素进行校准后,当使用lidar系统产生在空间上分开的相干激光脉冲并结合距离选通检测技术时,剩余的主噪声贡献是散斑相关噪声。
[0246]
散斑噪声是由与反射激光的对象相交处的干扰效应所引起的半随机噪声,并且它通过反射激光传播且在检测器中进一步累积,从而向距离选通检测器中的经积分电荷添加了噪声。散斑会导致激光的反射不均匀,并且取决于对象的材料结构。散斑图案也因变于时间而变化,并且因此散斑在各脉冲之间并且在脉冲激光束的脉宽内变化。当应用距离选通技术时,其中反射激光在与所投射的脉冲的时间序列相对应的多个检测时间窗口中累积,
观察到散斑的效果可以在逐检测时间窗口地变化,并且在检测时间窗口期间积分电荷的多个像素或电荷阱之间是不同的。例如,如wo2017/068199中所述,当应用距离选通技术时,脉冲序列上的累积计数通常在第一时间窗口和随后的第二时间窗口中被检测。为了确定距离,确定在第一时间窗口中检测到的累积计数与在第一时间窗口中检测到的累积计数和在第二时间窗口中检测到的累积计数的总和之间的比率。因此,当采用这样的计数比率时,并且由于散斑逐时间窗口地变化,实际距离和测得距离之间会出现不可校准的偏差。因此,这导致较差的空间准确度。
[0247]
主散斑噪声贡献被认为是激光的特性以及以下组合的结果:用离散激光光斑图案照亮场景并结合在tof量级的时间段期间对电荷进行积分的距离选通检测器的使用,其中每个光斑由相干激光的脉冲序列形成。作为对比,对于dtof lidar系统,使用纳秒范围内的极短脉冲,并且没有像距离选通技术那样的电荷积分。因此,散斑噪声并未被观察到是此类dtof系统的主要问题。鉴于固体lidar系统的紧凑性,对于基于用离散激光光斑的图案照明和基于距离选通技术的此类系统而言,解决随机散斑问题具有挑战性。
[0248]
有利地,利用根据本公开的新型投影仪,其中通过混合第一激光束来形成第二激光束,第二激光束基本上发射非相干光。结果,投射由离散脉冲激光束形成的激光光斑图案的投影仪可被用作包含距离选通检测技术的lidar系统的一部分。实际上,由于在生成离散光斑图案之前投影仪对激光束进行混合,上述散斑噪声被消除,并且使用根据本公开的lidar系统获得的空间准确度落在理论预期之内。换言之,当拍摄多个帧并确定平均对象距离值时,则在标准偏差σ
avg
等于内,其中nf是帧数且σ是单帧测量的标准偏差,所获得的平均目标距离值在标准偏差σ
avg
内等于实际距离。因此,通过拍摄足够数量的帧,所确定的平均距离以99.99%的概率在平均值周围区间(例如 /-0.1%或 /-0.5%,这取决于所拍摄的帧数)内等于实际距离。
[0249]
其他检测技术
[0250]
根据本公开的投影仪不限于与基于距离选通技术的lidar系统一起使用。根据本公开的投影仪可以与适用于距离确定的任何距离检测技术一起使用。除了距离选通之外的其他示例还有直接飞行时间检测技术或位移技术,其中光斑相对于参考位置的位移被确定以用于推导距离信息。
[0251]
独立于检测技术,使用根据本公开的投影仪的lidar系统的技术效果和优点与底层投影系统的特征直接相关。如上所述,投影仪具有混合室,该混合室混合激光,使得由投影仪透镜系统生成的所得光图案是均匀的,即光斑图案的所有光斑(包括光斑图案周界处的光斑)具有相同的光强度。此外,实际上归因于光源的混合,投影仪非常稳健,如果单个光源(例如vcsel芯片的发射器)不工作,则对个体光斑的光强度的影响可以忽略不计。另外,激光器阵列可以有利地由多个vcsel芯片组成,即vcsel贴片,这便于激光器阵列的生产过程和成本。最后,混合造成较不相干的激光,并且因此减少了散斑噪声;
[0252]
根据本公开的lidar系统适于集成到交通工具中。集成在交通工具中的lidar系统被布置成可操作地覆盖该交通工具周围区域的至少一部分。区域的该至少一部分对应于需要确定距离的场景。所覆盖的区域取决于lidar设备的视野(fov),并且在各实施例中,fov是例如30
°
x10
°
或120
°
x30
°
或63
°
x21
°
或适合lidar系统的任何其他fov。根据本公开的
lidar系统不仅限于用于汽车应用的lidar,而且该系统还可应用于其中lidar例如安装在飞机或卫星上的其他领域。
[0253]
附图标记
[0254]
[0255]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。