技术特征:
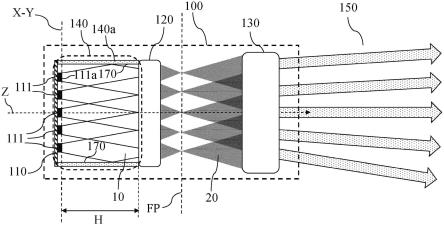
1.一种用于用离散光斑图案(150)照亮场景(99)的投影仪(100),所述投影仪(100)包括:激光器阵列(110),所述激光器阵列包括能操作用于发射发散的第一激光束(10)的多个离散的固态激光源(111),混合室(140),所述混合室沿着主光轴(z)延伸并且被配置成接收并允许所述第一激光束(10)中的每一者发散,直到对于每个第一激光束,其光线的至少一部分与相邻第一激光束的光线交叠,整形光学系统(120),其被配置成:i)接收从所述混合室(140)出射的所述第一激光束(10)的交叠光线,以及ii)生成多个离散的第二激光束(20),其中每个第二激光束包括源自多个第一激光束的光线,投影仪透镜系统(130),所述投影仪透镜系统被配置成接收所述第二激光束(20)并向场景(99)投射所述第二激光束,并且其中所投射的第二激光束形成所述离散光斑图案(150)。2.根据权利要求1所述的投影仪(100),其特征在于,所述混合室(140)的内壁的至少一部分包括镜(141)。3.根据权利要求1所述的投影仪(100),其特征在于,所述混合室(140)的内壁的至少一部分是用于反射激光的反射壁(170)。4.根据权利要求3所述的投影仪,其特征在于,所述反射壁(170)包括被布置成在使用时检查所述投影仪的操作的检查口(180)。5.根据权利要求1至3中的任一项所述的投影仪,其特征在于,所述混合室(140)包括被配置成在使用时检查所述投影仪的操作的检查口(180)。6.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述整形光学系统(120)被配置成使得由所述整形光学系统形成的第二激光束的数量低于由所述激光器阵列(110)发射的第一激光束的数量。7.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述多个离散固态激光源被编组成多个贴片(t
i
),并且所述贴片被布置成形成一维或二维贴片阵列,并且其中每个贴片(t
i
)包括所述多个离散固态激光源中的与所述贴片(t
i
)相关联的多个(st
i
)离散固态激光源。8.根据权利要求7所述的投影仪,其特征在于,所述贴片(ti)中的每一者形成固态激光源的一维或二维子阵列。9.根据权利要求7或8所述的投影仪,其特征在于,沿所述主光轴(z)测量的所述混合室的长度(h)被定义成使得在所述第一激光束传播通过所述混合室之后,对于每个贴片,其至少一部分光线与相邻贴片的光线交叠。10.根据权利要求7至9中的任一项所述的投影仪(100),其特征在于,所述贴片具有矩形形状,并且其中所述贴片被布置成形成规则图案,以使得贴片间距离对于整个激光器阵列(110)而言是相同的。11.根据权利要求10所述的投影仪(100),其特征在于,所述混合室的所述长度被选择成使得:
其中h是所述混合室的长度,δ是两个相邻贴片的中心之间的距离,θ是所述固态激光源的光束发散角,且l是矩形贴片的一边的长度。12.根据权利要求7至11中的任一项所述的投影仪,其特征在于,所述投影仪还包括扩束器(148),所述扩束器被配置成增加贴片间区域中的照明,从而增加入射在所述第一微透镜阵列上的光分布的均匀性。13.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述整形光学系统包括第一微透镜阵列(121),所述第一微透镜阵列(121)包括多个微透镜(ml[i]),并且其中每个微透镜(ml[i])被配置成生成所述多个第二激光束中的一个第二激光束(20)。14.根据权利要求13所述的投影仪(100),其特征在于,所述第一微透镜阵列(121)被配置成使得所述第一微透镜阵列的每个微透镜(ml[i])包括位于平面(fp)或曲面(cfp)上的焦点(rfp[i]),并且其中所述平面(fp)或所述曲面(cfp)位于所述第一微透镜阵列(ml[i])和所述投影仪透镜系统(130)之间。15.根据权利要求13所述的投影仪(100),其特征在于,所述第一微透镜阵列(121)被配置成使得每个微透镜(ml[i])包括位于曲面(cfp)上的焦点(rfp[i]),并且其中所述曲面(cfp)对应于所述投影仪透镜系统(130)的弯曲焦平面。16.根据权利要求14或15所述的投影仪(100),其特征在于,所述微透镜(ml[i])中的每一者包括平行于所述主光轴(z)的光轴(z
i
)。17.根据权利要求14或15所述的投影仪(100),其特征在于,所述微透镜(ml[i])中的至少一部分包括不平行于所述主光轴(z)的光轴(z
i
)。18.根据权利要求13至17中的任一项所述的投影仪,其特征在于,所述第一微透镜阵列(121)被布置成使得所述第一微透镜阵列(121)的每个微透镜位于所述激光器阵列(110)的多个固态激光源的光路中。19.根据权利要求13至18中的任一项所述的投影仪,其特征在于,所述第一微透镜阵列(121)包括第一数量的微透镜,并且其中所述激光器阵列(110)包括第二数量的离散固态激光源,并且其中所述第一数量等于或小于所述第二数量。20.根据权利要求13到19中的任一项所述的投影仪(100),其特征在于,所述投影仪还包括第二微透镜阵列(122),所述第二微透镜阵列被配置成减小由所述固态激光源(111)发射的第一激光束的发散角,优选地所述第二微透镜阵列(122)被布置在所述激光器阵列(110)和所述第一微透镜阵列(121)之间。21.根据前述权利要求中的任一项所述的投影仪,其特征在于,所述投影仪还包括配置成增加所述混合室内的第一激光束的交叠的漫射器(145)和/或环行器(146)。22.根据权利要求20所述的投影仪,其特征在于,还包括被配置成增加所述混合室内的第一激光束的交叠的漫射器(145),并且其中所述漫射器(145)布置在所述第二微透镜阵列(122)和所述第一微透镜阵列(121)之间。23.根据权利要求20所述的投影仪,其特征在于,还包括漫射器(145)和环行器(146),并且其中所述环行器(146)布置在所述第二微透镜阵列(122)和所述漫射器(145)之间。24.根据权利要求20所述的投影仪,其特征在于,所述激光器阵列(110)由多个vcsel芯
片组成,其中每个vcsel芯片包括多个激光发射器,并且其中每个激光发射器对应于所述离散固态激光源中的一个,优选地所述第二微透镜阵列(122)中的微透镜的数量等于或小于所述激光器阵列的发射器的总数。25.根据前述权利要求中的任一项所述的投影仪,其特征在于,还包括被配置成减小所述第一激光束的波长散布的布拉格体积光栅(147)。26.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述激光器阵列的每个激光源具有位于发射平面(x-y)中的发射表面(111a),并且其中所述第一激光束(10)在与垂直于所述发射平面(x-y)的主光轴(z)平行的方向上传播。27.根据前述权利要求中的任一项所述的投影仪,其特征在于,所述混合室(140)包括形成三维中空体的周向侧(140a)。28.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述激光器阵列(110)是一维或二维激光器阵列(110)。29.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述激光器阵列(110)的所述固态光源中的每一者都是半导体激光器,优选地是垂直腔面发射激光器。30.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述激光器阵列(110)是前端vcsel阵列。31.根据权利要求1至29中的任一项所述的投影仪(100),其特征在于,所述激光器阵列(110)是包括多个垂直腔面发射激光器的后端vcsel阵列,所述垂直腔面发射激光器被配置成发射激光通过所述后端vcsel阵列的基板(70)。32.根据权利要求20所述的投影仪(100),其特征在于,所述激光器阵列(110)是包括所述第二微透镜阵列(122)的后端vcsel阵列,并且其中所述第二微透镜阵列包括配置成减小所述vcsel阵列的每个垂直腔面发射激光器的发散角(θ
vcsel
)的微透镜(ml
vcsel
[i]),优选地所述第二微透镜阵列(122)被蚀刻在所述后端vcsel阵列110的基板70中。33.根据前述权利要求中的任一项所述的投影仪,其特征在于,所述整形光学系统(120)还被配置成对交叠光线进行再聚焦。34.根据前述权利要求中的任一项所述的投影仪(100),其特征在于,所述多个离散固态激光源(111)能操作用于同时发射发散且脉冲式的第一激光束(10),并且其中所述脉冲式的第一激光束中的每一者包括具有时间脉宽(pw)的第一脉冲的时间序列,并且其中所述整形光学系统(120)被配置成i)接收从所述混合室(140)出射的所述脉冲式的第一激光束(10)的交叠光线,以及ii)生成多个离散的脉冲式的第二激光束(20),其中每个第二激光束包括源自多个第一激光束的光线,并且其中每个脉冲式的第二激光束包括具有所述时间脉宽(pw)的第二脉冲的时间序列,并且其中所述投影仪透镜系统(130)被配置成接收所述脉冲式的第二激光束(20)并向所述场景(99)投射所述脉冲式的第二激光束,并且其中所投射的脉冲式的第二激光束形成所述离散光斑图案(150)。35.一种用于确定到场景(99)中的一个或多个对象的距离的固态lidar系统(1),包括:根据前述权利要求中的任一项所述的投影仪(100),用于用离散光斑图案照亮所述场景(99),
包括多像素检测器的光接收设备(300),所述多像素检测器被配置成检测反射的激光光斑,所述反射的激光光斑表示由所述场景的一个或多个对象反射的离散光斑图案,控制器(200),所述控制器用于控制所述投影仪(100)和所述光接收设备(300),以便与所述场景的所述照明同步地检测和积累所述反射激光,以及处理装置(400),所说处理装置被配置成基于所累积的反射激光来计算到所述场景的一个或多个对象的距离。36.一种用于确定到场景(99)的一个或多个对象的距离的固态lidar系统,包括:根据权利要求34所述的投影仪(100),用于用离散光斑图案照亮所述场景(99),包括多像素检测器的光接收设备(300),所述多像素检测器被配置成检测反射的激光光斑,所述反射的激光光斑表示由所述场景的一个或多个对象反射的离散光斑图案,并且其中所述多像素检测器是被配置成在连贯检测时间窗口期间检测反射激光的距离选通多像素检测器,控制器(200),所述控制器用于控制所述投影仪(100)和所述光接收设备(300),以便与所述场景的所述照明同步地检测和积累所述反射激光,以及处理装置(400),所述处理装置被配置成基于所累积的反射激光来计算到所述场景的一个或多个对象的距离。37.根据权利要求36所述的固态lidar系统,其特征在于,所述距离选通多像素检测器被配置成在至少两个连贯检测时间窗口期间检测反射激光,并且其中所述处理装置(400)被配置成基于在所述两个连贯检测时间窗口期间检测到的激光来计算到所述对象的距离。38.根据权利要求36至37中的任一项所述的固态lidar系统,其特征在于,所述控制器(200)被配置成控制所述激光器阵列(110),以使得所述多个离散固态激光源中的每一者以脉冲频率(fp)发射所述第一脉冲,以使得f
p
≤1/(tof
max
pw),其中f
p
是所述脉冲频率,pw是所述时间脉宽,且tof
max
是要确定的预定义最大距离(d
max
)的最大飞行时间。39.根据权利要求35所述的固态lidar系统,其特征在于,所述多像素检测器是直接飞行时间多像素检测器,并且所述处理装置被配置成借助于直接飞行时间方案来计算到所述对象的距离。40.一种包括根据权利要求35至39中的任一项所述的固态lidar系统的交通工具,所述交通工具具有覆盖所述交通工具周围区域的至少一部分的视野,并且其中所述区域的所述至少一部分对应于所述场景。41.根据权利要求1至34中任一项所述的投影仪(100)用于遥测系统的用途。
技术总结
本公开涉及一种用于用于确定到场景的距离的固态LIDAR系统的投影仪。该投影仪被配置成用离散的光斑图案照亮场景。该投影仪包括:激光器阵列,该激光器阵列包括用于同时发射第一激光束的多个离散的固态激光源;混合室,其被配置成接收并允许每个第一激光束的传播,直到每个第一激光束的至少一部分光线与相邻第一激光束的至少一部分光线交叠;整形光学系统,其被配置成接收第一激光束的交叠光线并生成多个第二激光束,使得每个第二激光束包括源自多个第一激光束的光线;以及投影仪透镜系统,用于将由第二激光束形成的离散光斑图案投影到场景。本公开还涉及一种包括此类投影仪和用于检测反射激光的光接收设备的固态LIDAR系统。统。统。
技术研发人员:R
受保护的技术使用者:齐诺马蒂赛股份有限公司
技术研发日:2020.09.02
技术公布日:2022/6/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。