1.本发明涉及一种测量装置、曝光装置和物品制造方法。
背景技术:
2.诸如半导体设备和液晶显示设备之类的微设备通过光刻方法制造,在光刻方法中将形成在原件上的图案转移到基板。在光刻工艺中使用的曝光装置具有用于支撑原件的原件台和用于支撑基板的基板台,并且在依次移动原件台和基板台的同时通过投射光学系统将原件的图案转移到基板。在曝光装置中,每次基板上的相应曝光目标区域(压射区域(shot region))被基板台移动到投射光学系统下方的曝光位置时,投射光学系统的焦点与基板的平面位置(高度位置)之间的偏差被测量装置检测,并且基板的平面位置被校正和聚焦。
3.日本专利no.6491833公开了通过使用其长度、间隔和宽度被致使以逐步方式改变的测量狭缝来执行对作为目标物体的基板的高度的测量。日本专利特许公开no.2018-179665公开了通过同时投射条纹图案和固定图案来使用固定图案获得条纹图案的相位。日本专利no.5443303描述了通过预先测量长周期图案和短周期图案之间的相位关系来执行少量的高精度的高度测量。
4.但是,因为根据日本专利no.6491833的技术使检测目标的区域中的图案改变,所以在测量准确度方面可能是不利的。根据日本专利特许公开no.2018-179665的技术,由于需要使条纹图案的投射位置与固定图案的投射位置相匹配,因此测量点密度可能会与固定图案成比例地减小。此外,根据日本专利no.5443303的技术,由于在改变周期性图案的相位的同时进行投射的步骤需要被执行至少四次,因此这在测量时间即吞吐量方面可能是不利的。
技术实现要素:
5.本发明提供例如有利于实现高精度测量和高吞吐量二者的测量装置。
6.本发明在其第一方面提供了一种用于测量物体的高度位置的测量装置,该装置包括被配置为将测量光投射到物体上的光投射器、被配置为接收被物体反射的测量光的光接收器、以及被配置为基于由光接收器接收到的测量光的图像确定物体的高度位置的处理器,其中光投射器被配置为将粗糙检测图案和具有周期性图案的精细检测图案投射到物体上,并且处理器被配置为基于由光接收器接收到的粗糙检测图案确定物体的高度位置的粗糙检测值,以及基于粗糙检测值和由光接收器接收到的精细检测图案确定物体的高度位置的精细检测值。
7.本发明在其第二方面提供了一种用于通过投射光学系统将原件的图案投射到基板上并对基板进行曝光的曝光装置,该装置包括根据第一方面的被布置为测量基板的高度位置的测量装置以及控制器,该控制器被配置为基于由测量装置测量的结果控制基板的位置,使得高度位置与投射光学系统的像平面的偏差量减小。
8.本发明在其第三方面提供了一种用于制造物品的方法,该方法包括使用根据第二方面的曝光装置对基板进行曝光,以及对经曝光的基板进行显影,其中从经显影的基板制造物品。
9.根据对示例性实施例的以下描述(参考附图),本发明的其它特征将变得清楚。
附图说明
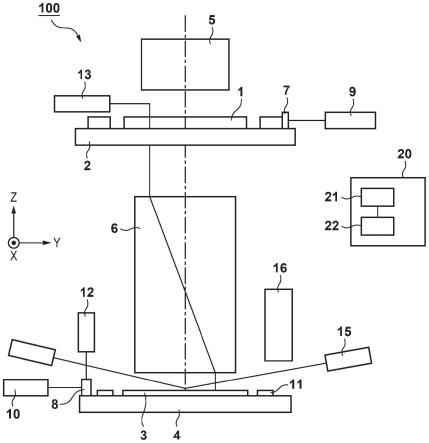
10.图1是图示曝光装置的配置的图。
11.图2是图示基板的压射布局和对准标记的图。
12.图3a和图3b是图示测量装置的配置示例和掩模的配置示例的图。
13.图4a至图4d是用于解释常规技术中的节距偏差的图。
14.图5是图示目标物体上的光投射图案的示例的图。
15.图6是图示目标物体上的光投射图案的示例的图。
16.图7是图示用于由测量装置计算高度位置的方法的图。
17.图8是图示目标物体上的光投射图案的示例的图。
18.图9是图示目标物体上的光投射图案的示例的图。
19.图10是图示用于由测量装置计算高度位置的方法的图。
20.图11是用于描述曝光方法的流程图。
具体实施方式
21.在下文中,将参考附图详细描述实施例。注意的是,以下实施例并非旨在限制要求保护的发明的范围。实施例中描述了多个特征,但并不限于需要所有这些特征的发明,并且多个这样的特征可以适当地组合。此外,在附图中,相同的附图标记被赋予相同或相似的配置,并且省略对其的冗余描述。
22.《第一实施例》
23.图1是图示根据实施例的应用了本发明的测量装置的曝光装置100的配置的图。图2是图示基板3的压射布局和对准标记的图。在本说明书和附图中,方向在xyz坐标系中示出,其中水平平面是xy平面。一般而言,基板3被放置在基板台4上,使得基板3的表面平行于水平平面(xy平面)。因此,在以下描述中,将在沿着基板3的表面的平面中相互正交的方向定义为x轴和y轴,并且将垂直于x轴和y轴的方向定义为z轴。在下面的描述中,平行于xyz坐标系中的x轴、y轴和z轴的方向被称为x方向、y方向和z方向,并且绕x轴、y轴和z轴的旋转方向分别被称为θx方向、θy方向和θz方向。
24.在图1中,曝光装置100包括保持原件1的原件台2、保持基板3并且可移动的基板台4、以及用曝光光照射保持在原件台2中的原件1的照明光学系统5。曝光装置100还包括:投射光学系统6,其将被曝光光照射的原件1的图案投射到由基板台4保持的基板3上并对图案进行曝光;以及控制器20,其共同地控制整个曝光装置的操作。控制器20可以包括例如cpu 21和存储器22。存储器22存储各种控制数据、要由cpu 21执行的曝光装置的控制程序,等等。
25.曝光装置100可以是例如扫描曝光装置(扫描仪),其在沿着扫描方向(例如,y方向)彼此同步地移动原件1和基板3的同时对基板3进行曝光。替代地,曝光装置100可以是这
样一种类型的曝光装置(步进机):其中在固定原件1的状态下对基板3进行曝光并且逐步移动基板3以对下一个压射区域进行曝光。
26.原件1中的预定照明区域由照明光学系统5用具有均匀照度分布的曝光光照射。照明光学系统5中的光源可以是汞灯、krf准分子激光器、arf准分子激光器、f2激光器等。替代地,为了制造更小的半导体元件等,照明光学系统5可以发射波长为几nm至百nm的极紫外光(extreme ultra violet:euv光)。
27.原件台2是可在xy平面中移动的,并且可以在θz方向上微小地旋转。原件台2由诸如线性马达之类的原件台驱动装置(未示出)驱动,并且原件台驱动装置由控制器20控制。原件台2上设有镜7。此外,用于测量镜7的位置的xy平面激光干涉仪9设在面对镜7的位置处。激光干涉仪9实时测量原件1在原件台2上的二维位置和旋转角度,并将测量结果输出到控制器20。控制器20基于激光干涉仪9的测量结果控制原件台驱动装置,并执行原件台2(即原件1)的定位。
28.投射光学系统6以预定的投射倍率将原件1的图案投射到基板3上,并且可以包括多个光学元件。投射光学系统6可以是具有例如1/4或1/5的投射倍率的缩小投射系统。
29.基板台4包括用于经由基板卡盘(未示出)保持基板3的θz倾斜台、用于支撑θz倾斜台的xy台(未示出)和用于支撑xy台的底座(未示出)。基板台4由诸如线性马达之类的基板台驱动装置(未示出)驱动。基板台驱动装置由控制器20控制。此外,与基板台4一起移动的镜8设在基板台4上。此外,设有在面向镜8的位置处用于x和y轴测量的激光干涉仪10,并且设有用于z方向测量的激光干涉仪12。基板台4的x轴位置和y轴位置以及θz由激光干涉仪10实时测量,并且测量结果被输出到控制器20。此外,激光干涉仪12实时测量基板台4的z轴位置、θx和θy,并将测量结果输出到控制器20。控制器20基于激光干涉仪10和12的测量结果控制基板台驱动装置,并执行基板台4(即,基板3)的定位。
30.原件对准检测系统13设在原件台2附近。原件对准检测系统13检测原件1的原件基准标记(未示出)和基板台4上的台基准板11上的基板侧基准标记17(见图2)。此外,原件对准检测系统13安装有诸如ccd相机之类的光电转换元件,例如,以检测来自原件基准标记和基板侧基准标记17的反射光。基于光电转换元件的信号,执行原件与基板之间的对准。此时,通过调整原件基准标记和基板侧基准标记17的位置和聚焦,可以调整原件与基板之间的相对位置关系(x、y、z)。顺便提及,基板侧基准标记17可以是透射的或反射的。在基板台4的角部处的台基准板11安装在与基板3的表面大致相同的高度处。
31.离轴(oa)检测系统16包括用于将测量光辐照到基板3上的基板对准标记19(见图2)和台基准板11上的oa检测系统基准标记18(见图2)的辐照器。oa检测系统16内部还包括用于接收来自这些标记的反射光的光接收器、检测基板对准标记19和oa检测系统基准标记18的位置。
32.作为聚焦/倾斜检测系统的测量装置15通过将测量光投射到作为目标物体(物体)的基板3的表面上并接收由基板3反射的测量光来测量基板3在高度方向(z轴)上的表面位置(高度位置)。这里,测量装置15被配置为由控制器20控制,但是测量装置15可以设有专用控制器。
33.参考图3a,将详细描述测量装置15。测量装置15可以包括将测量光投射到基板3的光投射器110和接收被基板3反射的测量光的光接收器120。由光接收器120接收到的测量光
的图像的信号被传送到作为处理器的控制器20,并且控制器20基于接收到的信号执行确定基板3的高度位置的处理。
34.光投射器110可以包括聚光透镜111、掩模112、透镜113和镜114。光接收器120可以包括镜124、透镜122和图像捕获单元123。图像捕获单元123可以包括图像捕获元件121,诸如ccd或cmos。从光源115反射的光被聚光透镜111会聚以照射掩模112。构成图案的多个狭缝形成在掩模112中,并且测量光由掩模112从来自光源115的光形成。穿过掩模112的多个狭缝的光经由透镜113和镜114以预定的入射角入射到基板3上。掩模112和基板3相对于透镜113具有成像关系,并且在基板3上形成掩模112的多个狭缝的空中图像。透镜113可以用于将掩模112和基板3置于shine-proof光学关系。因此,可以通过将掩模112的整个表面聚焦在基板3上来提高测量准确度。在测量基板3的高度时,还可以防止测量值因基板3局部倾斜而发生变化。被基板3反射的测量光经由镜124和透镜122重新成像在图像捕获单元123的图像捕获元件121上,并且获得与掩模112的多个狭缝对应的狭缝图像的信号125。透镜122可以用于将基板3和图像捕获元件121置于shine-proof光学关系。因此,通过将基板3的整个表面聚焦在图像捕获元件121上,可以提高测量准确度。在测量基板3的高度时,还可以防止测量值因基板3局部倾斜而发生变化。信号125被传送到作为处理器的控制器20。控制器20通过检测在图像捕获元件121上接收到的信号125的位置偏差,获得基板3在z方向上的位置(高度位置)。
35.掩模112的多个狭缝的图像通过光投射器110投射到基板3上。在下文中,这被称为“光投射图案”。参考图4a至图4d,将描述常规技术的基板3上的光投射图案140。测量装置基于投射到图像捕获元件的视场303中的预定的精细检测区域301上的光投射图案来精确地确定高度位置。在测量装置中,为了详细测量基板3的表面的精细检测区域301中的高度,需要使光投射图案140的图案间隔141(图4a)尽可能窄。当光接收器120接收到光投射图案140时,图案图像151出现在图像捕获元件121的成像表面上(图4b)。当使用图案图像151的信号的每个峰位置执行高度测量时,测量点的数量与图像捕获元件的视场303中的峰位置153的数量的增加成比例地增加。为了增加精细检测区域301中的测量点的数量,需要使图案间隔141更窄。
36.但是,当使光投射图案140的图案间隔更窄时,“节距偏差”的问题可能变得显著。例如,如图4c中所示,由于基板3的高度变化,因此存在精细检测区域301中的光投射图案140相对于图4a的图案偏离一个周期的情况。图4d图示了此时由光接收器120接收到的图案图像151,其可以与图4b中的相同。因此,即使基板3的高度变化,由控制器20计算出的精细检测区域301中的高度的检测值也可能不变。因此,当具有周期性结构的光投射图案的投射位置出现一个周期以上的误差时,不可能准确地执行高度测量。
37.作为针对这种节距偏差的对策,在本实施例中,光投射器110将不同类型的光投射图案投射在基板3上。掩模112的平面图在图3b中示出。掩模112具有第一区域r1和第二区域r2。例如,第一区域r1是在掩模112的中心的区域,并且第二区域r2可以是与第一区域r1相邻的区域或在第一区域r1周围的区域。在第一区域r1中,多个狭缝s1以间隔d1周期性地布置。当来自光源115的光穿过多个狭缝s1时,具有周期性的精细检测图案被投射在基板3上。在第二区域r2中,形成一个或多个狭缝。在图3b的示例中,在第二区域r2中,多个狭缝s2以大于间隔d1的间隔d2周期性地布置。来自光源115的光穿过多个狭缝s2,由此粗糙检测图案
被投射到基板3上。
38.作为处理器的控制器20基于由光接收器123接收到的粗糙检测图案和精细检测图案确定基板3的高度位置。例如,控制器20基于由光接收器123接收到的粗糙检测图案获得基板3的高度位置的粗糙检测值。之后,控制器20基于获得的粗糙检测值和由光接收器123接收到的精细检测图案确定基板3的高度位置的精细检测值。
39.图5图示了在该实施例中投射在基板3上的光投射图案的示例。在图5中,光投射图案212由精细检测图案210和粗糙检测图案220组成。光投射器110使用具有如图3b中所示的配置的掩模112来投射精细检测图案210和粗糙检测图案220二者。光投射器110可以同时投射精细检测图案210和粗糙检测图案220,或者可以投射精细检测图案210和粗糙检测图案220使得投射粗糙检测图案220的时段与投射精细检测图案210的时段的至少一部分重叠。精细检测图案210被投射到精细检测区域301上,并且粗糙检测图案220被投射到与精细检测区域301相邻的粗糙检测区域302上。在图像捕获元件121的视场303中,精细检测图案210和粗糙检测图案220二者都入射。在图像捕获元件121的视场303中,精细检测图案210和粗糙检测图案220可以同时入射,并且粗糙检测图案210入射的时段与精细检测图案220入射的时段的至少一部分可以重叠。顺便提及,光投射图案212取决于基板3的高度而在图案从光投射器110投射到基板3上的方向(从上方沿z方向观察的平面图中的y方向)上变化,但是不需要整个变化的光投射图案212适合于图像捕获元件121的视场303。控制器20可以接收足够的图案光使得可以在精细检测图案210和粗糙检测图案220中的每一个中执行高度位置的计算就足够了。
40.精细检测图案210和粗糙检测图案220由彼此不同的图案形成。此外,为了增加精细检测区域301中的测量点的数量,例如,使精细检测图案210的间隔211小于粗糙检测图案220的间隔221。使粗糙检测图案220的间隔221为在基板3的高度变化的范围(其被预先确定为测量装置100的测量范围)内粗糙检测图案220不会变化单个周期的长度。因此,由于粗糙检测图案220不会引起节距偏差(周期性误差),因此粗糙检测值被唯一地确定。
41.粗糙检测图案220可以是没有周期性的单一图案,只要总是可以相对于由于基板3在测量装置100的测量范围内的高度变化引起的光投射图案112的变化在控制器20中执行高度计算即可。作为示例,粗糙检测图案220可以是如图6中所示的点图案。考虑到基板3的反射率和图像捕获元件121的视场303在基板3中的位置的变化、以及由于内部结构造成的渐晕等,可以在多个位置布置点图案作为粗糙检测图案220,如图6中所示。
42.例如,精细检测图案210和粗糙检测图案220彼此相邻。因为精细检测图案210和粗糙检测图案220相邻,所以可以减小基板3的使用精细检测图案210的高度测量与基板3的使用粗糙检测图案220的高度测量之间的测量位置差异。
43.参考图7,将给出对由控制器20执行的高度位置计算方法的描述。控制器20使用粗糙检测区域302中的粗糙检测图案220获得基板3的高度位置的粗糙检测值233。如上所述,由于使粗糙检测图案220成为不引起节距偏差(周期性误差)的图案,因此唯一地确定粗糙检测值233。此后,控制器20基于粗糙检测值233和精细检测图案210获得基板3的高度位置的精细检测值。具体而言,如下获得精细检测值。
44.控制器20使用精细检测区域301中的精细检测图案210确定基板3在测量范围内的多个高度位置候选231。多个高度位置候选231可以包括在没有节距偏差的情况下检测到的
高度位置和在具有一个周期以上的节距偏差的情况下检测到的高度位置。由于粗糙检测图案测量位置(粗糙检测区域302)和精细检测图案的测量位置(精细检测区域301)相邻,因此粗糙检测值233是接近于基板3在精细检测区域301中的实际高度位置230的值。因此,控制器20获得多个高度位置候选231中的与粗糙检测值233之间具有最小差异234(最接近粗糙检测值233)的精细检测值作为精细检测值。
45.因此,可以防止由于节距偏差引起的错误检测,并且实现高精度的高度位置检测。这种测量技术在吞吐量方面也是有利的,因为不需要像常规技术那样为了确定高度位置而执行多次投射。
46.《第二实施例》
47.图8图示了第二实施例中目标物体上的光投射图案的示例。当作为目标物体的基板3的高度变化时,基板3上的光投射图案112被投射的位置发生变化。此时,如果光投射图案112偏离精细检测区域301,那么不可能执行测量。因此,在本实施例中,精细检测图案210被投射到基板3的表面的包括精细检测区域301的比精细检测区域301大的区域上,使得即使物体的高度变化,也确然可以在精细检测区域301中观察到精细检测图案210。
48.在一个示例中,在从上方沿z方向观察精细检测区域301的平面图中,光投射器110和光接收器120之间的测量光的光轴方向平行于y方向。在这种情况下,当精细检测区域301的高度波动时,精细检测图案210在精细检测区域301上投射的位置在y方向上改变。因此,为了始终将精细检测图案210投射到精细检测区域301上,使精细检测图案210在y方向上的投射范围大于精细检测区域301在y方向上的范围。
49.在这种情况下,例如,如图8中所示,粗糙检测图案220被设置于在x方向上分离的位置处,其中精细检测图案210介于其间。为了使用粗糙检测图案220测量物体的高度,无论精细检测区域301的高度变化如何,图像捕获元件121都必须始终接收粗糙检测图案220。如果物体的高度变化,那么光投射图案112在y方向上变化,y方向是平面图中测量光的光轴方向。因此,通过沿着垂直于y方向(该方向为在其上图案由于物体高度变化而变化的方向)的x方向布置粗糙检测图案220,可以减小图像捕获元件121的所需尺寸。一般而言,由于图像捕获元件的尺寸与价格直接成比例,因此期望图像捕获元件的尺寸更小。此外,由于当图像捕获元件的像素数量增加时传送速度和计算处理速度增加,并且较大的图像捕获元件在测量吞吐量方面不利,因此期望较小的图像捕获元件。
50.《第三实施例》
51.图9图示了投射到精细检测区域301的粗糙检测图案92和投射到精细检测区域301附近的粗糙检测区域302的精细检测图案91的示例。精细检测图案91是具有第一周期的图案,并且粗糙检测图案92是具有比第一周期长的第二周期的图案。与图5的示例相比,图9中的粗糙检测图案92的周期比图5的粗糙检测图案220的周期短。由于可以增加测量点的数量,因此粗糙检测图案92的周期性图案越短,就可以以越高的准确度执行高度测量。通过提高使用粗糙检测图案92确定的粗糙检测区域302的高度测量的准确度,可以从使用精细检测图案91选择的多个高度位置候选231中更准确地确定精细检测区域301的高度位置。
52.但是,虽然图5的示例中的粗糙检测图案220的周期被设置为不会引起节距偏差的长度,但是图9的粗糙检测图案92的周期比它更短,并且与精细检测图案91一样,存在节距偏差的可能性。因此,在本实施例中,如下获得高度位置。
53.参考图10,将描述本实施例中计算高度位置的方法。控制器20使用粗糙检测区域302中的粗糙检测图案92获得基板3的高度位置的粗糙检测值。但是,在本实施例中,由于粗糙检测图案92可能导致节距偏差,因此高度位置不是唯一确定的。因此,控制器20使用粗糙检测图案92获得针对基板3在测量范围的高度位置的多个粗糙检测值候选232。多个粗糙检测值候选232可以包括在没有节距偏差的情况下检测到的粗糙检测值和在具有一个周期以上的节距偏差的情况下检测到的粗糙检测值。接下来,控制器20使用精细检测图案91获得针对基板3在测量范围中的高度位置的多个精细检测值候选231。
54.接下来,控制器20从多个对当中指定具有差异dmin(高度位置的最小差异d)的对的精细检测值候选235,每个对包括多个粗糙检测值候选232之一和多个精细检测值候选231之一。识别出的精细检测值候选235最接近实际高度位置230。因此,控制器20获得指定的精细检测值候选235作为精细检测值。
55.考虑多个粗糙检测值候选232和多个精细检测值候选231的组合,测量范围是从基准状态直到精细检测图案91的周期和粗糙检测图案92的周期各自都是确切的整数倍的区间236。因此,在提高精细检测图案91和粗糙检测图案92的相应的测量准确度的同时,可以进一步扩大精细检测图案91的测量范围。
56.此外,通过使精细检测图案91和粗糙检测图案92二者都为周期性图案,可以对精细检测图案91和粗糙检测图案92中的每一个使用相同的高度计算方法。因此,由于控制器20中不需要具有多个处理器(未示出),因此可以通过简化处理器来降低成本,并且可以通过单个处理来提高处理速度。
57.《第四实施例》
58.如图2中所示,曝光装置100将原件1的图案传送到基板3的多个压射区域中的每个压射区域。参考图11的流程图,将描述通过曝光装置100曝光基板的方法。
59.首先,在步骤s21中,基板3被传送到曝光装置100中,并且在步骤s22中,由oa检测系统16执行基板3的对准。接下来,在步骤s10中,由测量装置15执行根据上述方法的基板3的表面位置测量,并且例如作为测量结果的表面形状数据被存储在存储器22中。接下来,在步骤s23中,基板3被基板台4定位在用于开始扫描要曝光的压射区域的位置处。此时,基板台4基于基板3的表面形状数据控制基板3的在z方向上的位置(聚焦)和倾斜度(倾斜),使得基板3的表面位置与投射光学系统6的像平面的偏差量减少。在步骤s24中,要曝光的压射区域被扫描并曝光。在该扫描曝光中,控制器20使基板台4控制基板3的z轴位置(聚焦)和倾斜度(倾斜),使得与像平面的偏差量减小。因此,在每个压射区域的扫描曝光中,能够与基板3的扫描同步地使基板3的表面与投射光学系统6的像平面相匹配。在步骤s25中,控制器20确定是否存在未曝光的压射区域。如果存在未曝光的压射区域,那么该处理返回到步骤s10以对下一个压射区域重复该处理。在所有压射区域的曝光完成之后,在步骤s26中,从曝光装置100卸载基板3。
60.通过上述曝光方法,曝光装置100将原件1的图案转移到基板3的多个压射区域中的每个压射区域,如图2中所示。即,共同的图案被转移到每个压射区域。因此,可以仅在第一次测量基板3的高度位置时执行使用粗糙检测图案的测量。此外,当预先设想基板3的高度变化时,可以采用不执行使用粗糙检测图案的测量的配置。由于在这种情况下减少了测量点的数量,因此提高了图像捕获元件的捕获速度和控制器中的高度计算速度。替代地,使
用精细检测图案的高度测量的测量点的数量可以增加测量点数量减少的量。在这种情况下,可以在不改变高度计算速度的情况下进行高密度的高度测量。
61.《物品制造方法的实施例》
62.例如,根据本发明的实施例的物品制造方法适用于制造诸如微设备(诸如半导体设备)或具有微结构的元件之类的物品。本实施例的物品制造方法包括使用上述曝光装置在施加到基板的感光剂上形成潜像图案的步骤(对基板进行曝光的第一步骤)和对通过这样的步骤在其上形成有潜像图案的基板进行显影的第二步骤。此外,此类制造方法包括诸如氧化、沉积、蒸镀、掺杂、平坦化、蚀刻、抗蚀剂剥离、切割、接合、封装等其它众所周知的处理。本实施例的物品制造方法与常规方法相比,在物品的性能、质量、生产率和生产成本中的至少一项上具有优势。
63.虽然已经参考示例性实施例描述了本发明,但是应该理解的是,本发明不限于所公开的示例性实施例。所附权利要求的范围被赋予最广泛的解释以涵盖所有此类修改和等效结构及功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。