技术特征:
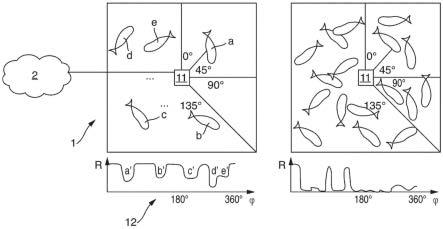
1.一种用于在过程工程中操作测量点(1,1’)的方法,其中,在所述测量点(1,1’)处使用至少一个激光雷达(光检测和传输)系统(11,11’),所述方法包括:-借助于所述激光雷达系统(11,11’)从所述测量点(1,1’)的周围环境获取空间信息(12);-从所述空间信息提取对象信息(a’,
……
,e’);以及-基于所述对象信息(a’,
……
,e’)重建和标识对象(a,
……
,f),并且将所述对象信息(a’,
……
,e’)与所重建和所标识的对象(a,
……
,f)相关联。2.根据权利要求1所述的方法,包括:-以预定时间间隔重复上述方法步骤,并且记录每个所重建和所标识的对象(a,
……
,f)的所述对象信息(a’,
……
,e’)的时间曲线,特别是它们随时间在空间位置、数量、形状和/或大小上的改变;-分析所述对象信息(a’,
……
,e’)的所述时间曲线;以及-基于对所述对象信息(a’,
……
,e’)的所述时间曲线的所述分析来确定预测,和/或基于对所述对象信息(a’,
……
,e’)的所述时间曲线的所述分析和/或基于所述预测来确定——尤其是执行——至少一个动作。3.根据权利要求1或2所述的方法,其中,ai算法用于重构和标识所述对象(a,
……
,f)以用于分析所述对象信息(a’,
……
,e’)的所述时间曲线,和/或用于确定所述动作或所述预测。4.根据前述权利要求中的至少一项所述的方法,其中,所述对象信息(a’,
……
,e’)用来自至少一个另外的传感器系统——尤其是相机或雷达系统——的信息来丰富。5.根据前述权利要求中的至少一项所述的方法,其中,所述测量点(1,1’)是在水产养殖中使用的测量点(1),其中,所述对象(a,
……
,e)是水生生物,并且其中,所述对象信息是水生生物的大小和/或数量和/或大小或数量的平均值。6.根据权利要求5所述的方法,其中,所述预测包含关于水生生物的所述数量的增加或减少或关于水生生物的所述数量的平均值的信息。7.根据权利要求1至4中至少一项所述的方法,其中,所述测量点(1,1’)是在精确农业中使用的测量点(1),其中,所述对象是农产品,尤其是农作物或动物,并且其中,所述对象信息(a’,
……
,e’)是农产品的大小和/或数量。8.根据权利要求8所述的方法,其中,所述预测包含关于农产品的所述数量的增加或减少或者关于农产品的所述数量的平均值的信息。9.根据权利要求1至4中至少一项所述的方法,其中,所述测量点(1’)位于具有至少一个设施组件——特别是罐、通道、开放池和/或管道——的过程设施中,并且其中,所述对象(f)是至少两种不同介质的相界或具有不同光密度的至少两种介质的相界,并且其中,所述对象信息是气泡或固体的含量。10.根据权利要求9所述的方法,其中,所述预测包含过程质量的改变程度。11.根据权利要求1至4中至少一项所述的方法,其中,所述测量点(1,1’)用在输送系统中,并且其中,所述对象是散装材料中的异物,尤其是有缺陷的散装材料或外来对象。12.根据权利要求11所述的方法,其中,确定并且执行所述异物的距离作为所述测量,其中,指示所述异物的位置。
13.根据权利要求5至8中至少一项所述的方法,其中,所述预定时间间隔为1小时至几天的数量级。14.根据权利要求9至12中至少一项所述的方法,其中,所述预定时间间隔为0.1ms至10s的数量级。
技术总结
本发明涉及激光雷达测量原理在过程技术中的应用。一种用于在过程工程中操作测量点(1、1')的方法,其中在所述测量点(1、1')使用至少一个激光雷达(光探测和传输)系统(11、11'),所述方法包括:-借助于所述激光雷达系统(11,11’)从所述测量点(1,1’)的周围环境获取空间信息(12);-从所述空间信息提取对象信息(a’,
技术研发人员:埃里克
受保护的技术使用者:恩德莱斯和豪瑟尔分析仪表两合公司
技术研发日:2021.12.16
技术公布日:2022/6/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。