1.本技术涉及晶圆检测技术领域,尤其是涉及一种晶粒分选装置。
背景技术:
2.随着半导体产业使用的元器件芯片(晶圆)的集成度越来越高,生产工艺越来越复杂,在生产制造完成后,需要对其进行检测分选及编带打包等工序处理。
3.现有技术中,采用人工检测及转移的方式生产晶圆,不仅检测效率和准确率低下,而且影响下一工序的封装质量。单臂固晶类设备由于自身机械结构限制,其转移速度低下,无法适应高速度、高准确率检测的要求。
4.真空转塔模组直接从晶圆夹臂上取料,影响检测时间,从而影响整机的运行效率,并且,直接从晶圆夹臂上取料,会导致被吸嘴吸取的一面无法检测,影响检测的可靠性。同时,采用一个芯片视觉外观检测装置对芯片的5面进行检测会增加检测时间,导致整机效率低。
5.传统振动盘上料的led分选机已经不适用于mini led芯片的检测测试,其导致芯片损伤程度会加大,无法对芯片全部外观缺陷进行检测,影响产品的最终良率。
技术实现要素:
6.本技术公开了一种晶粒分选装置,能够解决检测可靠性低、运行效率低的技术问题。
7.本技术提供了一种晶粒分选装置,所述晶粒分选装置包括上料组件、夹取组件、晶圆台组件、顶针组件、翻转组件、检测组件、转塔组件及收料组件,所述上料组件获取晶圆盒,所述晶圆盒中装载有多片晶圆,所述夹取组件将所述晶圆盒中的多片晶圆分别夹取至所述晶圆台组件,所述晶圆台组件对所述晶圆进行扩膜,所述顶针组件顶起扩膜后的所述晶圆上的晶粒,所述翻转组件吸取所述晶粒,所述检测组件包括第一检测相机,所述第一检测相机用于检测所述晶粒的第一面,所述翻转组件将所述晶粒的第一面旋转并对准所述转塔组件,以使得所述转塔组件吸取所述晶粒的第一面,所述检测组件还包括第二检测相机、第三检测相机、第四检测相机、第五检测相机及第六检测相机,分别对所述晶粒的第二面、第三面、第四面、第五面及第六面进行检测,所述转塔组件将检测合格的所述晶粒旋转至所述收料组件进行收料。
8.可选的,所述上料组件包括上料z轴位移件、第一托板及第二托板,所述上料z轴位移件沿z轴方向上下位移,从而带动所述第一托板及所述第二托板沿所述z轴方向上下位移,所述第一托板用于承载第一规格的晶圆盒,所述第二托板用于承载第二规格的晶圆盒,所述第一规格和所述第二规格不同。
9.可选的,所述上料组件还包括第一传感器及第二传感器,当所述第一托板上承载有所述第一规格的晶圆盒时,所述第一传感器产生第一电信号;当所述第二托板上承载有所述第二规格的晶圆盒时,所述第二传感器产生第二电信号。
10.可选的,所述夹取组件包括夹取y轴位移件及夹取件,所述夹取y轴位移件沿y轴方向前后位移,从而带动所述夹取件沿所述y轴方向前后位移,所述夹取件用于从所述晶圆盒中夹取晶圆。
11.可选的,所述晶圆台组件包括晶圆台x轴位移件、晶圆台y轴位移件、晶圆台z轴位移件及晶圆台t轴旋转件,所述晶圆台x轴位移件沿x轴方向左右位移,从而带动所述晶圆沿所述x轴方向左右位移;所述晶圆台y轴位移件沿y轴方向前后位移,从而带动所述晶圆沿所述y轴方向前后位移;所述晶圆台z轴位移件沿z轴方向上下位移,从而带动所述晶圆沿所述z轴方向上下位移,并压紧所述晶圆,以对所述晶圆扩膜;所述晶圆台t轴旋转件旋转,从而带动所述晶圆旋转。
12.可选的,所述顶针组件包括顶针x轴位移件、顶针y轴位移件、第一顶针z轴位移件、第二顶针z轴位移件、顶针轴及顶针帽,所述顶针x轴位移件沿x轴方向左右位移,从而带动所述顶针帽沿所述x轴方向左右位移;所述顶针y轴位移件沿y轴方向前后位移,从而带动所述顶针帽沿所述y轴方向前后位移;当所述晶圆位于所述顶针帽的正上方时,所述第一顶针z轴位移件沿z轴方向向上位移,从而带动所述顶针帽沿所述z轴方向向上位移,贴近所述晶圆上的蓝膜;所述第二顶针z轴位移件沿z轴方向向上位移,从而带动所述顶针轴沿所述z轴方向向上位移,顶起所述蓝膜上的晶粒。
13.可选的,所述翻转组件包括下压件、翻转y轴位移件、翻转马达、翻转真空件及翻转吸嘴,所述下压件沿z轴方向上下位移,从而带动所述翻转吸嘴沿所述z轴方向上下位移,所述翻转马达带动所述翻转吸嘴旋转,所述翻转真空件为所述翻转吸嘴提供吸气压或吹气压,从而实现对所述晶粒的搬运。
14.可选的,所述晶粒分选装置还包括校正组件,所述校正组件包括校正x轴位移件、校正y轴位移件、校正t轴旋转件、校正定位相机、xy轴校正块及t轴校正块,所述校正x轴位移件沿x轴方向左右位移,从而带动所述xy轴校正块沿所述x轴方向左右位移;所述校正y轴位移件沿y轴前后位移,从而带动所述xy轴校正块沿所述y轴方向前后位移;所述校正t轴旋转件旋转,从而带动所述t轴校正块旋转,以在x轴方向或y轴方向上对所述晶粒校正;所述校正定位相机的中心与所述xy校正块中心位于一条直线上,当所述xy校正块移动时,带动所述xy轴校正块在所述x轴方向或所述y轴方向上位移,以对所述晶粒的角度校正。
15.可选的,所述转塔组件包括取放吸嘴及转塔马达,所述取放吸嘴吸取所述翻转组件上的晶粒,所述转塔马达带动所述取放吸嘴旋转,从而带动所述晶粒旋转至所述校正组件,对所述晶粒进行校正后,所述转塔马达继续旋转,带动所述晶粒旋转至所述检测组件对所述晶粒进行检测。
16.可选的,所述收料组件包括收料x轴位移件、收料轨道、第一收料u轴转动件、热封z轴位移件、盖带路径、上盖带、裁剪件、第二收料u轴转动件及收料y轴位移件,所述收料x轴位移件及所述收料y轴位移件分别带动所述收料轨道沿x轴方向或y轴方向位移,使得检测完成的晶粒收入编带中;所述第一收料u轴转动件的转动,带动所述收料轨道中的载带等距移动;所述热封z轴位移件沿z轴方向上下位移,从而带动热封刀沿z轴方向上下位移,对所述上盖带经过所述盖带路径到达所述收料轨道上的盖带进行热封。所述第二收料u轴转动件转动,从而带动空载带盘进行编带收料,当收取所述晶粒达到一定数量时,所述裁剪件剪断所述载带。
17.所述翻转组件吸取所述晶粒后,所述第一检测相机先对所述晶粒的第一面完成检测,再通过所述转塔组件吸取所述晶粒的第一面,所述检测组件中的其余检测相机分别对所述晶粒的其余面完成检测,增加了检测可靠性的同时,提高了检测效率。
附图说明
18.为了更清楚的说明本技术实施方式中的技术方案,下面将对实施方式中所需要使用的附图作简单的介绍,显而易见的,下面描述中的附图仅仅是本技术的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
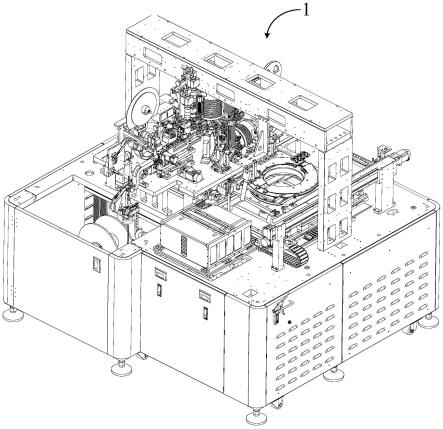
19.图1为本技术一实施方式提供的晶粒分选装置示意图。
20.图2为本技术一实施方式提供的晶粒分选装置俯视示意图。
21.图3为本技术一实施方式提供的上料组件示意图。
22.图4为本技术一实施方式提供的夹取组件示意图。
23.图5为本技术一实施方式提供的晶圆台组件示意图。
24.图6为本技术一实施方式提供的顶针组件示意图。
25.图7为本技术一实施方式提供的翻转组件示意图。
26.图8为本技术一实施方式提供的下压件示意图。
27.图9为本技术一实施方式提供的翻转原理示意图。
28.图10为本技术一实施方式提供的校正组件示意图。
29.图11为本技术一实施方式提供的转塔组件示意图。
30.图12为本技术一实施方式提供的转塔组件工位示意图。
31.图13为本技术一实施方式提供的第二检测相机示意图。
32.图14为本技术一实施方式提供的第三检测相机示意图。
33.图15为本技术一实施方式提供的收料组件示意图。
34.附图标号说明:晶粒分选装置-1、上料组件-11、上料z轴位移件-111、第一托板-112、第二托板-113、夹取组件-12、夹取y轴位移件-121、夹取件-122、晶圆台组件-13、晶圆台x轴位移件-131、晶圆台y轴位移件-132、晶圆台z轴位移件-133、晶圆台t轴位移件-134、顶针组件-14、顶针x轴位移件-141、顶针y轴位移件-142、第一顶针z轴位移件-143、第二顶针z轴位移件-144、顶针轴-145、顶针帽-146、翻转组件-15、下压件-151、驱动马达-1511、下压y轴位移件-1512、下压块-1513、翻转y轴位移件-152、翻转马达-153、翻转真空件-154、翻转吸嘴-155、检测组件-16、第二x轴位移件-160、第二感光件-161、第二镜头-162、第二转角光源-163、第二面光源-164、第三x轴位移件-165、第三感光件-166、第三镜头-167、第三棱镜-168、第三面光源-169、转塔组件-17、取放吸嘴-171、转塔马达-172、第一下压件-173、第二下压件-174、第三下压件-175、第四下压件-176、收料组件-18、收料x轴位移件-181、收料轨道-182、第一收料u轴转动件-183、热封z轴位移件-184、盖带路径-185、上盖带-186、裁剪件-187、第二收料u轴转动件-188、收料y轴位移件-189、校正组件-19、校正x轴位移件-191、校正y轴位移件-192、校正t轴旋转件-193、校正定位相机-194、xy轴校正块-195、t轴校正块-196
具体实施方式
35.下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整的描述,显然,所描述的实施方式仅是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
36.本技术提供了一种晶粒分选装置1,请一并参阅图1及图2,图1为本技术一实施方式提供的晶粒分选装置示意图;图2为本技术一实施方式提供的晶粒分选装置俯视示意图。所述晶粒分选装置1包括上料组件11、夹取组件12、晶圆台组件13、顶针组件14(见图6)、翻转组件15、检测组件16、转塔组件17及收料组件18,所述上料组件11获取晶圆盒,所述晶圆盒中装载有多片晶圆,所述夹取组件12将所述晶圆盒中的多片晶圆分别夹取至所述晶圆台组件13,所述晶圆台组件13对所述晶圆进行扩膜,所述顶针组件14顶起扩膜后的所述晶圆上的晶粒,所述翻转组件15吸取所述晶粒,所述检测组件16包括第一检测相机,所述第一检测相机用于检测所述晶粒的第一面,所述翻转组件15将所述晶粒的第一面旋转并对准所述转塔组件17,以使得所述转塔组件17吸取所述晶粒的第一面,所述检测组件16还包括第二检测相机、第三检测相机、第四检测相机、第五检测相机及第六检测相机,分别对所述晶粒的第二面、第三面、第四面、第五面及第六面进行检测,所述转塔组件17将检测合格的所述晶粒旋转至所述收料组件18进行收料。
37.需要说明的是,所述晶圆盒通常由人工放置于所述上料组件11上,对所述晶圆进行切割等加工将得到晶粒,即芯片电路。通常情况下,所述晶粒为具有六个表面的立体结构。具体的,由于所述翻转组件15先吸取所述晶粒的第一面,所述第一检测相机对所述晶粒的第一面进行检测后,再经由所述翻转组件15将所述晶粒的第一面旋转对准至所述转塔组件17,以使得所述转塔组件17吸取所述晶粒的第一面,并在所述转塔组件17的旋转带动下,所述检测组件16还用于对所述晶粒的第二面、第三面、第四面、第五面及第六面进行检测,也就是说,所述检测组件16对所述晶粒的六个表面均进行了检测,增加了检测的可靠性。
38.在本实施方式中,所述检测组件16包括所述第二检测相机、所述第三检测相机、所述第四检测相机、所述第五检测相机及所述第六检测相机,可以一次性检测所述晶粒的第二面、第三面、第四面、第五面及第六面,极大的提高所述晶粒的检测效率。可以理解的,在其他可能的实施方式中,所述检测组件16包括的检测相机的数量还可以是其他数量,本技术对此不加以限制。
39.可以理解的,在本实施方式中,所述翻转组件15吸取所述晶粒后,所述第一检测相机先对所述晶粒的第一面完成检测,再通过所述转塔组件17吸取所述晶粒的第一面,所述检测组件16中的其余检测相机分别对所述晶粒的其余面完成检测,增加了检测可靠性的同时,提高了检测效率。
40.在一种可能的实施方式中,请一并参阅图3,图3为本技术一实施方式提供的上料组件示意图。所述上料组件11包括上料z轴位移件111、第一托板112及第二托板113,所述上料z轴位移件111沿z轴方向上下位移,从而带动所述第一托板112及所述第二托板113沿所述z轴方向上下位移,所述第一托板112用于承载第一规格的晶圆盒,所述第二托板113用于承载第二规格的晶圆盒,所述第一规格和所述第二规格不同。
41.需要说明的是,所述晶圆盒具有不同规格尺寸,以适配不同的工艺生产流程或设
备。通常情况下,所述晶圆盒具有8寸或12寸的规格尺寸。在本实施方式中,所述第一规格为12寸,所述第二规格为8寸,可以理解的,在其他可能的实施方式中,所述第一规格和所述第二规格还可以是其他规格尺寸,本技术对此不加以限制。
42.具体的,通过人工或其他方式将晶圆盒放置于所述第一托板112或所述第二托板113后,所述上料z轴位移件111沿z轴方向上下位移,带动所述第一托板112及所述第二托板113沿所述z轴方向上下位移,从而将所述晶圆盒推动至所述夹取组件12,以使得所述夹取组件12由所述晶圆盒中夹取晶圆。
43.在一种可能的实施方式中,所述上料组件11还包括第一传感器及第二传感器,当所述第一托板112上承载有所述第一规格的晶圆盒时,所述第一传感器产生第一电信号;当所述第二托板113上承载有所述第二规格的晶圆盒时,所述第二传感器产生第二电信号。
44.具体的,请再次参阅图3,所述第一托板112和所述第二托板113在所述z轴方向上具有高度差,在本实施方式中,所述第一传感器和所述第二传感器为光电传感器,当所述第一托板112上承载有所述第一规格的晶圆盒时,由于所述第一规格的晶圆盒遮挡所述第一传感器,而并未遮挡所述第二传感器,所述第一传感器响应,并产生所述第一电信号,所述第二传感器不响应;当所述第二托板113上承载有所述第二规格的晶圆盒时,由于所述第二规格的晶圆盒遮挡所述第一传感器,同时还遮挡所述第二传感器,所述第二传感器产生所述第二电信号,所述第一传感器响应,所述第二传感器响应,从而实现所述晶粒分选装置1中的处理器根据所述第一电信号的有无,识别不同规格尺寸的晶圆盒的上料。
45.可以理解的,在其他可能的实施方式中,所述第一传感器和所述第二传感器还可以是其他类型的传感器,或者,还可以以其他实施方式实现识别不同规格尺寸的晶圆盒的上料,本技术对此不加以限制。
46.在一种可能的实施方式中,请一并参阅图4,图4为本技术一实施方式提供的夹取组件示意图。所述夹取组件12包括夹取y轴位移件121及夹取件122,所述夹取y轴位移件121沿y轴方向前后位移,从而带动所述夹取件122沿所述y轴方向前后位移,所述夹取件122用于从所述晶圆盒中夹取晶圆。
47.具体的,所述夹取y轴位移件121沿y轴方向前后位移,从而带动所述夹取件122沿所述y轴方向前后位移,当所述夹取件122与所述晶圆盒在所述z轴方向同轴时,所述夹取y轴位移件121停止位移,所述上料z轴位移件111带动所述晶圆盒位移至所述夹取件122附近,从而使得所述夹取件122可以由所述晶圆盒中夹取晶圆。
48.在本实施方式中,所述晶粒分选装置1还包括扫描组件,所述夹取件122夹取晶圆后,所述夹取y轴位移件121位移至所述扫描组件,所述扫描组件对所述晶圆上的标签码进行识别,并与数据库中的数据进行对比,若所述晶圆上的标签码与数据库中的数据匹配,则所述夹取y轴位移件121位移至所述晶圆台组件13,并将所述晶圆放置于所述晶圆台组件13。在所述夹取件122将所述晶圆放置于所述晶圆台组件13,并完成扩膜、吸取晶粒后,所述夹取y轴位移件121夹取空的晶圆载体位移至所述上料组件11,以将空的晶圆载体下料至所述晶圆盒。
49.在一种可能的实施方式中,请一并参阅图5,图5为本技术一实施方式提供的晶圆台组件示意图。所述晶圆台组件13包括晶圆台x轴位移件131、晶圆台y轴位移件132、晶圆台z轴位移件133及晶圆台t轴旋转件134,所述晶圆台x轴位移件131沿x轴方向左右位移,从而
带动所述晶圆沿所述x轴方向左右位移;所述晶圆台y轴位移件132沿y轴方向前后位移,从而带动所述晶圆沿所述y轴方向前后位移;所述晶圆台z轴位移件133沿z轴方向上下位移,从而带动所述晶圆沿所述z轴方向上下位移,并压紧所述晶圆,以对所述晶圆扩膜;所述晶圆台t轴旋转件134旋转,从而带动所述晶圆旋转。
50.具体的,所述晶圆台x轴位移件131和所述晶圆台y轴位移件132分别用于控制所述晶圆在所述x轴方向上的位移和所述y轴方向上的位移,所述晶圆台t轴旋转件134用于对所述晶圆进行角度修正。在修正所述晶圆的位置和角度后,所述晶圆台z轴位移件133对所述晶圆进行压紧及扩膜,从而使得所述顶针组件14能够顶起所述晶圆上的晶粒。
51.在一种可能的实施方式中,请一并参阅图6,图6为本技术一实施方式提供的顶针组件示意图。所述顶针组件14包括顶针x轴位移件141、顶针y轴位移件142、第一顶针z轴位移件143、第二顶针z轴位移件144、顶针轴145及顶针帽146,所述顶针x轴位移件141沿x轴方向左右位移,从而带动所述顶针帽146沿所述x轴方向左右位移;所述顶针y轴位移件142沿y轴方向前后位移,从而带动所述顶针帽146沿所述y轴方向前后位移;当所述晶圆位于所述顶针帽146的正上方时,所述第一顶针z轴位移件143沿z轴方向向上位移,从而带动所述顶针帽146沿所述z轴方向向上位移,贴近所述晶圆上的蓝膜;所述第二顶针z轴位移件144沿z轴方向向上位移,从而带动所述顶针轴145沿所述z轴方向向上位移,顶起所述蓝膜上的晶粒。
52.具体的,所述顶针x轴位移件141和所述顶针y轴位移件142分别用于控制所述顶针帽146在所述x轴方向上的位移和所述y轴方向上的位移,当所述顶针帽146位于所述晶圆台组件13上的晶圆的正下方时,所述第一顶针z轴位移件143沿z轴方向向上位移,从而带动所述顶针帽146沿所述z轴方向向上位移,贴近所述晶圆上的蓝膜。
53.可以理解的,由于所述顶针帽146内为真空状态,使得所述晶圆的蓝膜上切割好的晶粒会吸附在所述顶针帽146上,此时,所述第二顶针z轴位移件144沿z轴方向向上位移,从而带动所述顶针轴145沿所述z轴方向向上位移,顶起所述蓝膜上的晶粒,从而使得晶粒可以被吸嘴吸取。
54.在一种可能的实施方式中,请一并参阅图7及图8,图7为本技术一实施方式提供的翻转组件示意图;图8为本技术一实施方式提供的下压件示意图。所述翻转组件15包括下压件151、翻转y轴位移件152、翻转马达153、翻转真空件154及翻转吸嘴155,所述下压件151沿z轴方向上下位移,从而带动所述翻转吸嘴155沿所述z轴方向上下位移,所述翻转马达153带动所述翻转吸嘴155旋转,所述翻转真空件154为所述翻转吸嘴155提供吸气压或吹气压,从而实现对所述晶粒的搬运。
55.具体的,所述下压件151包括驱动马达1511、下压y轴位移件1512及下压块1513,所述下压块1513设置于所述下压y轴位移件1512上,所述驱动马达1511带动所述下压y轴位移件1512沿z轴方向上下位移,带动所述下压块1513沿所述z轴方向上下位移,从而带动所述翻转吸嘴155沿所述z轴方向上下位移,使得所述翻转吸嘴155靠近所述晶圆,实现对所述晶圆上的晶粒吸取的目的。
56.具体的,所述翻转组件15还包括定位相机,所述晶圆台x轴位移件131及所述晶圆台y轴位移件132将所述晶圆位移至所述顶针帽146正上方后,所述定位相机对单个晶圆进行拍照定位,所述晶圆台t轴旋转件134对所述晶圆进行角度修正。所述驱动马达1511带动
所述翻转吸嘴155下移,此时所述顶针帽146顶起晶粒,使得所述翻转吸嘴155吸取晶粒。之后通过所述晶圆台x轴位移件131及所述晶圆台y轴位移件132将下一晶粒位移至所述翻转吸嘴155下方,依次循环将晶圆载体上的每个晶粒吸取完毕。
57.可以理解的,在本实施方式中,请一并参阅图9,图9为本技术一实施方式提供的翻转原理示意图。所述翻转吸嘴155先吸取所述晶粒,此时,所述晶粒与所述翻转吸嘴155相对的一面为所述晶粒的第一面。所述翻转吸嘴155先将所述晶粒旋转至检测工位,所述检测组件16对所述晶粒的第一面进行检测。在所述检测组件16对所述晶粒的第一面完成检测后,所述翻转马达153带动所述翻转吸嘴155旋转180
°
,使得所述晶粒的第一面对准所述转塔组件17,从而使得所述转塔组件17吸取所述晶粒的第一面,完成所述晶粒的翻转。若所述晶粒的第一面检测不合格,则所述翻转吸嘴155旋转至不良品处理位置,将所述晶粒抛除。
58.可以理解的,在其他可能的实施方式中,还可以以其他实施方式对所述晶粒完成翻转,本技术对此不加以限制。
59.在一种可能的实施方式中,请一并参阅图10,图10为本技术一实施方式提供的校正组件示意图。所述晶粒分选装置1还包括校正组件19,所述校正组件19包括校正x轴位移件191、校正y轴位移件192、校正t轴旋转件193、校正定位相机194、xy轴校正块195及t轴校正块196,所述校正x轴位移件191沿x轴方向左右位移,从而带动所述xy轴校正块195沿所述x轴方向左右位移;所述校正y轴位移件192沿y轴前后位移,从而带动所述xy轴校正块195沿所述y轴方向前后位移;所述校正t轴旋转件193旋转,从而带动所述t轴校正块196旋转,以在x轴方向或y轴方向上对所述晶粒校正;所述校正定位相机194的中心与所述xy校正块中心位于一条直线上,当所述xy校正块移动时,带动所述xy轴校正块195在所述x轴方向或所述y轴方向上位移,以对所述晶粒的角度校正。
60.在一种可能的实施方式中,请一并参阅图11,图11为本技术一实施方式提供的转塔组件示意图。所述转塔组件17包括取放吸嘴171及转塔马达172,所述取放吸嘴171吸取所述翻转组件15上的晶粒,所述转塔马达172带动所述取放吸嘴171旋转,从而带动所述晶粒旋转至所述校正组件19,对所述晶粒进行校正后,所述转塔马达172继续旋转,带动所述晶粒旋转至所述检测组件16对所述晶粒进行检测。
61.具体的,请一并参阅图12,图12为本技术一实施方式提供的转塔组件工位示意图。所述取放吸嘴171由所述翻转吸嘴155吸取所述晶粒的第一面后,所述转塔旋转马达驱动旋转所述取放吸嘴171,将所述晶粒携带旋转至所述校正组件19的校正工位。所述校正定位相机194与所述xy轴校正块195的中心同轴,所述xy轴校正块195沿x轴方向位移,并触碰所述晶粒以对所述晶粒在x轴方向校正;所述转塔组件17还包括第一下压件173,所述第一下压件173沿z轴方向向下位移,从而使得所述取放吸嘴171沿z轴方向向下位移,且所述xy轴校正块195沿y轴方向位移,并触碰所述晶粒以对所述晶粒在y轴方向校正;当所述取放吸嘴171与所述校正定位相机194中心同轴时,所述取放吸嘴171下移,所述校正t轴旋转件193转动,从而带动所述晶粒转动以对所述晶粒的角度进行校正。
62.在本实施方式中,如图12所示,所述晶粒旋转至底面检测工位时,所述第二检测相机对所述晶粒的第二面(底面)进行拍照检测。请一并参阅图13,图13为本技术一实施方式提供的第二检测相机示意图。所述第二检测相机包括第二x轴位移件160、第二感光件161、第二镜头162、第二转角光源163及第二面光源164。可以理解的,通过所述第二x轴位移件
160的位移,可以改变焦距以适应不同规格尺寸的晶粒的检测。通过所述第二转角光源163中的棱镜改变光的方向,从而使得所述第二感光件161能够检测所述第二面光源164正上方的晶粒,即检测所述晶粒的第二面。
63.具体的,所述晶粒的第二面检测完成后,所述取放吸嘴171继续旋转至侧面检测工位,所述第三检测相机对所述晶粒的第三面(右侧面)进行检测。请一并参阅图14,图14为本技术一实施方式提供的第三检测相机示意图。所述第三检测相机包括第三x轴位移件165、第三感光件166、第三镜头167、第三棱镜168及第三面光源169。可以理解的,通过所述第三x轴位移件165的位移,改变焦距以适应不同规格尺寸的晶粒检测。通过所述第三棱镜168改变光的方向,从而使得所述第三感光件166能够检测所述晶粒的第三面。可以理解的,除了光源分别面对4个不同方向,且4个感光件在z轴方向上具有一定高度差之外,所述第四检测相机、第五检测相机及第六检测相机的工作原理及结构与所述第三检测相机类似,本技术在此不再赘述。
64.可以理解的,当所述晶粒分别位于不同检测工位时,所述晶粒可能位于光源的上方或下方,使得所述晶粒无法被感光件检测。此时,所述转塔组件17还包括第二下压件174,所述第二下压件174沿z轴方向上下位移,从而使得所述取放吸嘴171沿z轴方向上下位移,使得所述晶粒位于光源内,使得所述晶粒可以被感光件检测到。
65.具体的,当所述晶粒的6个面均被检测完成后,所述取放吸嘴171将所述晶粒旋转至编带下料工位,所述收料组件18对合格晶粒进行编带下料。在本实施方式中,如所述晶粒的6个面的其中之一为次品时,所述取放吸嘴171将所述晶粒旋转至抛料进行抛除。所述转塔组件17还具有清洁工位,当所述取放吸嘴171位于清洁工位是,会通过吸嘴清料组件进行清理,再进入晶粒上料工位吸取晶粒。
66.在一种可能的实施方式中,请一并参阅图15,图15为本技术一实施方式提供的收料组件示意图。所述收料组件18包括收料x轴位移件181、收料轨道182、第一收料u轴转动件183、热封z轴位移件184、盖带路径185、上盖带186、裁剪件187、第二收料u轴转动件188及收料y轴位移件189,所述收料x轴位移件181及所述收料y轴位移件189分别带动所述收料轨道182沿x轴方向或y轴方向位移,使得检测完成的晶粒收入编带中;所述第一收料u轴转动件183的转动,带动所述收料轨道182中的载带等距移动;所述热封z轴位移件184沿z轴方向上下位移,从而带动热封刀沿z轴方向上下位移,对所述上盖带186经过所述盖带路径185到达所述收料轨道182上的盖带进行热封。所述第二收料u轴转动件188转动,从而带动空载带盘进行编带收料,当收取所述晶粒达到一定数量时,所述裁剪件187剪断所述载带。
67.具体的,收料定位相机识别收料组件18上的编带进行定位检测,所述转塔组件17还包括第三下压件175,所述第三下压件175沿z轴方向向下位移,使得所述取放吸嘴171沿z轴方向向下位移至所述收料组件18的编带放置位,所述取放吸嘴171进行吹气以将晶粒放置在编带上,所述第一收料u轴转动,带动编带向前移动。当编带移动至编带检测位置时,编带检测相机对编带上晶粒的放置情况进行检测,如出现不良品则通过真空吸嘴吸至不良品处理位。所述收料y轴位移件189使编带向y轴方向位移,所述第三下压件175使得所述取放吸嘴171沿z轴方向向下位移,以重新放置下一个晶粒进行检测。放置于编带上的晶粒会继续向y轴方向位移一段距离后,所述热封z轴位移件184转动,将上盖带186与编带压合,从而实现晶粒在编带上的封装。
68.此外,本技术提供的所述晶粒分选装置1具有重新编带的方式,即撒开封装好的编带上的上封带,露出编带内的晶粒,所述转塔组件17还包括第四下压件176,所述第四下压件176沿z轴方向向下位移,从而带动所述取放吸嘴171沿z轴方向向下位移,吸取编带中的晶粒,再依次通过校正、晶粒多个面的检测、编带收料,完成编带重编流程。
69.此外,本技术提供的所述晶粒分选装置1具有对芯片进行性能测试的方式,可以根据需求在检测工位之前添加测试装置,对芯片进行电性能测试。
70.需要说明的是,在本技术中,所述顶针组件14、所述晶圆台组件13与所述翻转吸嘴155同轴,所述取放吸嘴171与所述翻转吸嘴155同轴。
71.本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施方式的说明只是用于帮助理解本技术的核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。