1.本实用新型涉及运输设备技术领域,尤其涉及一种物流托盘运输车。
背景技术:
2.物流托盘用来托载商品和货物,便于商品和货物的运输。目前,普遍采用结构简单的托盘,托盘需要通过叉车运输,叉车将一个工位的托盘转移到另一个工位处时,需要工人手动将托盘放置装卸到叉车上,耗费了大量的人力和时间;叉车运输导致托盘运输机动性差、运输效率低、稳定性和安全性较差。且不能做到无人、自动化管理。
技术实现要素:
3.本实用新型主要解决目前托盘需要通过叉车运输,耗费了大量的人力和时间、运输效率低等技术问题,提出一种物流托盘运输车,以达到提高运输效率,降低劳动强度、降低生产成本的目的。
4.本实用新型提供了一种物流托盘运输车,包括:车架;
5.所述车架的底部四角分别设置万向轮;
6.所述车架上安装工字型连接架;
7.所述工字型连接架的底面留有用于与牵引机器人对接的接口;
8.所述工字型连接架的下方对称设置两根导向滑道,两根导向滑道之间形成牵引机器人行走通道。
9.优选的,所述车架呈矩形;
10.所述车架由四根连接板依次连接形成;
11.所述连接板之间通过框架连接块固定连接。
12.优选的,所述万向轮安装在框架连接块下方;
13.在四个万向轮中,至少有一个万向轮配置制动装置,所述制动装置安装在框架连接块中,并伸向所述万向轮。
14.优选的,所述制动装置通过钢丝牵引机构与刹车踏板连接,所述刹车踏板安装在工字型连接架的底面。
15.优选的,所述车架顶面设置多个防滑垫。
16.优选的,所述车架的对向侧面分别设置牵引连接件。
17.优选的,所述牵引机器人行走通道两端由内向外逐渐变大。
18.本实用新型提供的一种物流托盘运输车,车架顶部用来放置货物,防滑垫能够起到防滑作用。牵引机器人精准与物流托盘运输车连接,牵引机器人工作时在车架下方,对车架进行牵引,牵引机器人工作带动物流托盘运输车行走,实现货物高效运输。本实用新型能够把多台物流托盘运输车串接在一起,通过一台牵引机器人带动多台物流托盘运输车行走。本实用新型运输效率高、安全性高、机动性强、节省人工,可以达到无人化管理,降低劳动强度、降低生产成本。
附图说明
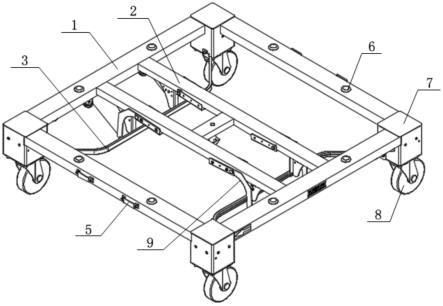
19.图1是本实用新型提供的物流托盘运输车的立体图;
20.图2是本实用新型提供的物流托盘运输车的底面结构示意图;
21.图3是本实用新型提供的物流托盘运输车的侧面结构示意图;
22.图4是本实用新型提供的制动装置的结构示意图。
23.附图标记:1、车架;2、工字型连接架;3、导向滑道;4、接口;5、牵引连接件;6、防滑垫;7、框架连接块;8、万向轮;9、刹车踏板;10、钢丝连接扣;11、钢丝;12、制动杆;13、挂钩。
具体实施方式
24.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部内容。
25.如图1-3所示,本实用新型实施例提供的物流托盘运输车,包括:车架1。
26.所述车架1的底部四角分别设置万向轮8;所述车架1顶面设置多个防滑垫6,车架1顶部用来放置货物托盘,防滑垫6能够起到防滑作用。所述车架1的对向侧面分别设置牵引连接件5,能够串接多台物流托盘运输车。
27.所述车架1上安装工字型连接架2;所述工字型连接架2的底面留有用于与牵引机器人对接的接口4;所述工字型连接架2的下方对称设置两根导向滑道3,两根导向滑道3之间形成牵引机器人行走通道,对牵引机器人进行导向。所述牵引机器人行走通道两端由内向外逐渐变大,方便牵引机器人进入。行走通道与工字型连接架2的长度方向垂直。
28.在本实施例中,工字型连接架2一方面能够使车架1结构稳固,另一方面用来连接牵引机器人,在本实施例中,工作时牵引机器人在工字型连接架2下方,牵引机器人上有与接口4对接的凸起,实现牵引机器人与工字型连接架2连接,带动车架1行走。
29.所述车架1呈矩形;所述车架1由四根连接板依次连接形成;所述连接板之间通过框架连接块7固定连接,框架连接块7位于车架1的四角。所述万向轮8安装在框架连接块7下方;在四个万向轮8中,至少有一个万向轮8配置制动装置,所述制动装置安装在框架连接块7中,并伸向所述万向轮8。所述制动装置通过钢丝牵引机构与刹车踏板9连接,所述刹车踏板9安装在工字型连接架2的底面。
30.具体的,钢丝牵引机构包括钢丝连接扣10、钢丝连接扣10两端的钢丝绳11以及多个导轮。钢丝绳11连接刹车踏板9。刹车踏板9一端铰接在工字型连接架2上,在万向轮制动状态下,刹车踏板9向下翘起;牵引机器人进入人行走通道,行走到工字型连接架2下方,能够顶起刹车踏板9,刹车踏板9扣合拉动钢丝绳11,使钢丝绳11牵引制动装置。
31.如图4所示,所述制动装置包括:挂钩13、传动机构和制动杆12,挂钩13伸出框架连接块7并连接钢丝牵引机构,挂钩13通过传动机构与制动杆12连接。在万向轮8制动状态下,制动杆12抵在万向轮8上,实现万向轮8制动;挂钩13向外拉动能够通过传动机构使制动杆12与万向轮8分离,解除万向轮8制动。
32.在本实施例中,选择对向设置的一对万向轮8配置制动装置,另一对万向轮8非制动;配置制动装置的每个万向轮8通过钢丝牵引机构连接两个刹车踏板9。两个刹车踏板9扣
合,牵引制动装置制动,制动杆12伸出抵在万向轮8上,锁紧对应的万向轮8。
33.本实施例的物流托盘运输车,在工作时,牵引机器人从行走通道的一端进入,牵引机器人到工字型连接架2下方,牵引机器人通过接口4与工字型连接架2连接,同时扣合刹车踏板9,通过钢丝牵引机构解除万向轮8制动,实现万向轮8自由活动。牵引机器人工作带动物流托盘运输车行走,实现货物高效运输。通过牵引连接件5能够把多台物流托盘运输车串接在一起,通过一台牵引机器人带动多台物流托盘运输车行走。
34.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
技术特征:
1.一种物流托盘运输车,其特征在于,包括:车架(1);所述车架(1)的底部四角分别设置万向轮(8);所述车架(1)上安装工字型连接架(2);所述工字型连接架(2)的底面留有用于与牵引机器人对接的接口(4);所述工字型连接架(2)的下方对称设置两根导向滑道(3),两根导向滑道(3)之间形成牵引机器人行走通道。2.根据权利要求1所述的物流托盘运输车,其特征在于,所述车架(1)呈矩形;所述车架(1)由四根连接板依次连接形成;所述连接板之间通过框架连接块(7)固定连接。3.根据权利要求2所述的物流托盘运输车,其特征在于,所述万向轮(8)安装在框架连接块(7)下方;在四个万向轮(8)中,至少有一个万向轮(8)配置制动装置,所述制动装置安装在框架连接块(7)中,并伸向所述万向轮(8)。4.根据权利要求3所述的物流托盘运输车,其特征在于,所述制动装置通过钢丝牵引机构与刹车踏板(9)连接,所述刹车踏板(9)安装在工字型连接架(2)的底面。5.根据权利要求1或4所述的物流托盘运输车,其特征在于,所述车架(1)顶面设置多个防滑垫(6)。6.根据权利要求5所述的物流托盘运输车,其特征在于,所述车架(1)的对向侧面分别设置牵引连接件(5)。7.根据权利要求1或4所述的物流托盘运输车,其特征在于,所述牵引机器人行走通道两端由内向外逐渐变大。
技术总结
本实用新型涉及运输设备技术领域,提供一种物流托盘运输车,包括:车架;所述车架的底部四角分别设置万向轮;所述车架上安装工字型连接架;所述工字型连接架的底面留有用于与牵引机器人对接的接口;所述工字型连接架的下方对称设置两根导向滑道,两根导向滑道之间形成牵引机器人行走通道。所述车架呈矩形;所述车架由四根连接板依次连接形成;所述连接板之间通过框架连接块固定连接。本实用新型能够提高运输效率,降低劳动强度、降低生产成本。降低生产成本。降低生产成本。
技术研发人员:姜建国
受保护的技术使用者:大连开泰隆设备有限公司
技术研发日:2022.03.09
技术公布日:2022/6/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
