1.本发明一般涉及工具系统、工具管理方法和程序,并且更特别地涉及包括便携式工具的工具系统、工具管理方法和程序。
背景技术:
2.专利文献1公开了一种工具系统,该工具系统包括具有利用从电池组供给的动力来激活的驱动单元的便携式工具、以及配备给该工具的摄像单元。摄像单元被布置成例如将附接到工具的输出轴的插口涵盖在其摄像范围内。摄像单元在使用工具进行作业期间拍摄作业对象(其例如可以是使用工具进行作业所针对的物体或场所)的图像。
3.根据专利文献1,使用摄像单元所拍摄到的图像来识别工具被设置在适当位置的作业对象(即,为了使工具准备好开始对作业对象进行作业所布置的作业对象)。也就是说,专利文献1的工具系统包括识别单元。识别单元将摄像单元所生成的拍摄图像与图像存储单元中所存储的多个基准图像进行比较,并将拍摄图像中所拍摄到的实拍作业对象识别为作业对象。这使得配备给工具的摄像单元能够通过非接触方法识别作业对象。另外,根据专利文献1,在发现识别单元所识别的作业对象在针对该作业对象的作业工序(working process step)方面不符合基准作业过程(reference working procedure)的情况下,工具系统例如进行停用驱动单元的处理。
4.然而,根据这种配置,例如在一旦完成了作业的紧固构件需要被进一步拧紧或需要从头开始经受重新拧紧的情况下、或者在需要进行不规则类型的作业的情况下,工具的操作有时可能被过多限制而无法将该工具用于预期目的。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2018-108633
技术实现要素:
8.有鉴于上述背景,因此本发明的目的是提供一种工具系统、工具管理方法和程序,其全部都有助于提高工具的便利性。
9.根据本发明的一方面的工具系统包括便携式工具、摄像单元和控制单元。便携式工具包括利用从动力源供给的动力来激活的驱动单元。摄像单元被配备给工具并且生成拍摄图像。控制单元基于拍摄图像来控制工具。控制单元具有作业支持功能。作业支持功能是在基于拍摄图像所识别的作业对象不符合由作业过程定义的作业指示的情况下对工具的操作施加限制的功能。控制单元在进行作业支持启用操作期间发现满足解除条件的情况下,暂停作业支持启用操作,并由此解除对工具的操作的限制。
10.根据本发明的另一方面的工具管理方法包括第一步骤、第二步骤和第三步骤。第一步骤包括:从配备给便携式工具的摄像单元获取拍摄图像,该工具包括利用从动力源供给的动力来激活的驱动单元。第二步骤包括:在基于拍摄图像所识别的作业对象不符合由
作业过程定义的作业指示的情况下,对工具的操作施加限制。第三步骤包括:在第二步骤期间满足解除条件的情况下,暂停第二步骤,并由此解除对工具的操作的限制。
11.根据本发明的又一方面的程序被设计为使得一个或多于一个处理器进行上述的工具管理方法。
附图说明
12.图1是根据第一实施例的工具系统的框图;
13.图2的a是例示该工具系统中所包括的工具的从一个角度看到的外观的立体图,图2的b是例示该工具系统中所包括的工具的从另一角度看到的外观的立体图;
14.图3示出该工具系统在登记模式中所要进行的操作的序列;
15.图4示出该工具系统在作业模式(working mode)中所要进行的操作的序列;
16.图5是大体示出该工具系统在作业支持功能启用的情况下如何操作的流程图;
17.图6是示出该工具系统中的禁用作业支持功能的处理和重新开始其作业支持启用操作(work-support-enabled operation)的处理的流程图;以及
18.图7是根据第二实施例的工具系统的框图。
具体实施方式
19.(第一实施例)
20.(1)概述
21.首先,将参考图1来说明根据典型实施例的工具系统1的概述。
22.根据本实施例的工具系统1包括便携式工具2。工具2例如包括包含马达的驱动单元24。利用从诸如电池组201等的动力源供给的原动力(诸如电力等)来激活驱动单元24。这种类型的工具2的示例包括冲击扳手、上螺母器、油脉冲扳手、螺丝起子(包括冲击螺丝起子)、钻机、钻螺丝起子和各种其他类型的工具。使用这种类型的工具2使得用户能够进行各种机械加工作业,诸如将紧固构件(诸如螺栓或螺母等)附接到作为作业对象的工件(机械加工作业对象)上、或者穿过工件开孔等。
23.另外,根据本实施例的工具系统1还包括摄像单元5。摄像单元5被配备给工具2。摄像单元5生成拍摄图像。摄像单元5例如将附接到工具2的输出轴241(参见图2的a)的插口242(参见图2的a)涵盖在其摄像范围(视场)中。因此,在用户正在使用工具2进行作业时,摄像单元5拍摄作业对象的图像并且生成拍摄图像。
24.因此,根据本实施例的工具系统1使得能够基于例如摄像单元5所生成的拍摄图像来识别作业对象,由此使得能够例如判断用户使用工具2正进行的作业是否遵循作业过程。另外,工具系统1还使得能够基于摄像单元5所生成的拍摄图像来判断已对作业对象进行的作业是好还是差,从而根据作业对象向用户通知作业指示,并将该图像作为日志(即,作业记录)进行存储。可以看出,使用由配备给工具2的摄像单元5生成的图像(拍摄图像)例如使得能够支持用户使用工具2进行他或她的作业或者管理他或她的作业。
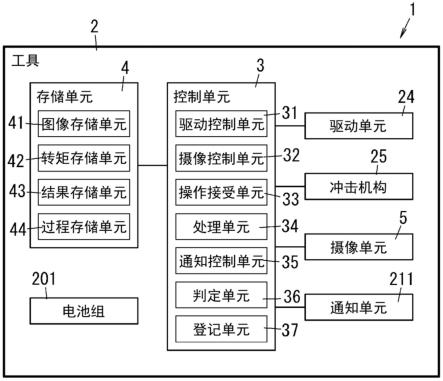
25.如图1所示,根据本实施例的工具系统1除了包括工具2和摄像单元5之外,还包括控制单元3。也就是说,工具系统1包括便携式工具2、摄像单元5和控制单元3。工具2包括利用从动力源供给的动力来激活的驱动单元24。摄像单元5被配备给工具2并且生成拍摄图
像。控制单元3基于拍摄图像来控制工具2。在这种情况下,控制单元3具有作业支持功能。作业支持功能是在基于拍摄图像所识别的作业对象不符合由作业过程定义的作业指示的情况下对工具2的操作施加限制的功能。控制单元3当在进行作业支持功能启用的操作(以下称为“作业支持启用操作”)期间发现满足解除条件时,暂停作业支持启用操作,并由此解除对工具2的操作的限制。
26.根据该配置,基本上,作业支持功能使得控制单元3能够基于摄像单元5所生成的拍摄图像来识别作业对象,并且判断用户使用工具2正进行的作业是否遵循作业过程。另外,在基于拍摄图像所识别的作业对象不符合由作业过程定义的作业指示的情况下,即,在用户使用工具2正进行的作业不遵循作业过程的情况下,控制单元3可以对工具2的操作施加限制。这使得工具系统1能够防止进行不符合作业过程的错误作业,并由此使得能够支持用户遵照作业过程进行他或她的作业。此外,当在控制单元进行作业支持启用操作期间满足解除条件时,根据本实施例的工具系统1可以暂停作业支持启用操作,并由此解除对工具2的操作的限制。因此,在用户正遵循作业过程进行他或她的作业时,例如即使在一旦完成了作业的紧固构件需要被进一步拧紧或需要从头开始经受重新拧紧的情况下、或者在需要进行不规则类型的作业的情况下,他或她也仍能够仅通过解除对工具2的操作的限制来使用工具2进行作业。因此,这实现了有助于提高工具2的便利性的优点。
27.(2)详细结构
28.接着,将参考图1至图2的b来说明根据本实施例的工具系统1的详细结构。
29.(2.1)前提
30.根据本实施例的工具系统1例如可用在工厂处的用于对制品进行组装作业的组装线中。特别地,在本实施例中,假定工具系统1中所包括的工具2是用于拧紧紧固构件(诸如螺栓或螺母等)的诸如冲击扳手等的紧固工具。具体地,假定本实施例应用于单个制品具有多个待紧固部位的情形,由此需要用户在单个作业场所中通过使用工具2将紧固构件附接到这些待紧固部位中的各待紧固部位上。
31.如本文所用,“待紧固部位”是指工件(机械加工作业对象)的要附接至紧固构件的部分。例如,如果紧固构件是螺栓,则待紧固部位是围绕且覆盖要附接至紧固构件的螺钉孔的区域。也就是说,在本实施例中,单个工件具有多个这样的待紧固部位。
32.如本文所使用的,“作业对象”是指假定通过使用工具2来进行作业所针对的物体(诸如工件等)或作业区域。特别地,工具2被设置在适当位置的作业对象在下文有时称为“当前作业对象”。如本文所使用的,短语“工具2被设置在适当位置”是指工具2被放置成准备好对作业对象进行作业的情形。此外,如本文所使用的,短语“被放置成准备好进行作业”不仅指工具2已与作业对象接触的情形,而且指工具2即将与作业对象接触的情形。也就是说,在工具2被设置在作业对象上的适当位置的状态下,工具2可能已与作业对象接触或者可能仍未与作业对象接触。在本实施例中,作为示例,假定单个工件的多个待紧固部位中的各待紧固部位均是作业对象。
33.如这里所使用的,“拍摄图像”是指摄像单元5所拍摄到的图像,并且包括静止照片(静止图像)和运动照片(动画)。“运动照片”例如还包括通过定格动画拍摄所拍摄到的一组静止照片。拍摄图像不必是由摄像单元5提供的输出数据本身。例如,拍摄图像可能根据需要经过了数据压缩、向另一数据格式的转换、从摄像单元5所拍摄到的图像中裁剪图像部
分、焦点调整、亮度调整、对比度调整、或者各种其他类型的图像处理中的任何图像处理。在本实施例中,例如假定拍摄图像是全色运动照片。
34.此外,如本文所使用的,如果某物被“配备给”其他某物,则前者可以内置在后者中(例如,与后者不可分离地一体化),或者可以仅作为外部构件附接到后者(例如,用例如联接器可移除地固定)。也就是说,配备给工具2的摄像单元5可以内置在工具2中或者仅作为外部构件附接到工具2,无论哪种都是适当的。
35.此外,如本文所使用的,“作业过程”意味着使用工具2要进行的作业的过程。例如,如果将要对单个作业对象或多个作业对象进行的一系列作业工序被定义为单个作业过程,则该作业过程表示在整个作业过程中应对单个作业对象或多个作业对象进行作业工序的顺序。更具体地,如果与要对单个作业对象进行的作业有关的指示是“作业指示”,则作业过程是表示针对单个作业过程的单个作业指示或多个作业指示以及应进行作业工序的顺序的信息。换句话说,作业过程表示作业对象与单个或多个作业工序中的哪个相对应,并且还表示相应作业工序的顺序位置。在本实施例的以下说明中,假定作业过程定义应按何顺序对单个工件中的多个作业对象进行作业(包括多个作业工序)。
36.(2.2)工具的结构
37.首先,将参考图2的a和图2的b来说明根据本实施例的工具系统1中的工具2的结构。
38.具体地,根据本实施例的工具系统1包括如上所述的便携式工具2。在本实施例中,工具2是被配置为通过使用电能来激活驱动单元24(参见图1)的电动工具。特别地,在本实施例中,假定工具2是冲击扳手。这种工具2可用于进行将紧固构件附接到作业对象上的紧固作业。工具2除了包括驱动单元24之外,还包括冲击机构25(参见图1)。
39.在这种情况下,工具2被设计为通过使用电池组201作为动力源,利用从电池组201供给的电力(电能)来激活驱动单元24。在本实施例中,假定电池组201被计入工具2的构成元件中。然而,电池组201不必是工具2的构成元件其中之一。换句话说,电池组201可以不被计入工具2的构成元件中。
40.工具2还包括本体20。在本体20中容纳有驱动单元24和冲击机构25。另外,如后面将说明的工具系统1中所包括的摄像单元5、控制单元3、存储单元4和通知单元211也容纳在本体20中。也就是说,在本实施例中,作为工具系统1的构成元件的摄像单元5、控制单元3、存储单元4和通知单元211容纳在工具2的本体20中,并由此与工具2一体化。
41.工具2的本体20包括筒体21、握持部22和附接构件23。筒体21是以筒状(例如,在本实施例中为圆筒形状)形成的。握持部22沿着相对于筒体21的周面的一部分的法线(即,沿着筒体21的半径)突出。电池组201可移除地附接到附接构件23。在本实施例中,附接构件23设置在握持部22的前端。换句话说,筒体21和附接构件23经由握持部22联接在一起。
42.至少驱动单元24容纳在筒体21中。驱动单元24包括马达。驱动单元24被配置为利用从作为动力源的电池组201供给到马达的动力来激活。输出轴241从筒体21的一个轴端面突出。在驱动单元24被激活时,输出轴241绕与输出轴241突出的方向对齐的转动轴ax1转动。也就是说,驱动单元24驱动输出轴241绕转动轴ax1转动。换句话说,在驱动单元24被激活时,转矩被施加到输出轴241,由此使得输出轴241转动。
43.用于转动紧固构件(诸如螺栓或螺母等)的筒状插口242可移除地附接到输出轴
241上。插口242连同输出轴241一起绕输出轴241转动。用户可以根据紧固构件的大小来适当地选择附接到输出轴241的插口242的大小。根据这种配置,激活驱动单元24使得输出轴241转动,由此使得插口242连同输出轴241一起转动。如果此时将紧固构件装配到插口242中,则紧固构件连同插口242一起转动,由此完成拧紧或松开紧固构件的作业。以这种方式,工具2可以通过激活驱动单元24来完成拧紧或松开紧固构件的作业。
44.可选地,还可以将插口砧座代替插口242附接到输出轴241上。插口砧座也可移除地附接到输出轴241。这使得钻头(诸如螺丝起子钻头或钻机钻头等)能够经由插口砧座附接到输出轴241。
45.工具2包括如上所述的冲击机构25。冲击机构25被配置为在紧固转矩(的作业值)超过预定水平时,在输出轴241的转动方向上施加冲击力。这使得工具2能够向紧固构件施加更大的紧固转矩。
46.握持部22是用户在他或她正进行作业时要握持的部分。握持部22配备有触发开关221和正向/反向开关222。触发开关221是用于控制由驱动单元24进行的操作的接通/断开(on/off)状态的开关,并且使得能够根据触发开关221被拉动的深度来调整输出轴241的转数。正向/反向开关222是用于将输出轴241的转动方向从顺时针方向切换到逆时针方向以及从逆时针方向切换到顺时针方向的开关。
47.附接构件23是以扁平长方体形状形成的。电池组201可移除地附接到附接构件23的与握持部22相反的一侧。
48.电池组201包括由树脂制成且以长方体形状形成的壳体202。壳体202内部容纳可再充电电池(诸如锂离子电池等)。电池组201向驱动单元24、控制单元3、摄像单元5和其他构成构件供给电力。
49.附接构件23还配备有控制面板231。控制面板231例如可以包括多个按压按钮开关232和多个led(发光二极管)233。控制面板231使得用户能够输入工具2的各种设置并确认工具2的状态。也就是说,允许用户例如通过操作控制面板231的按压按钮开关232来改变工具2的操作模式或检查电池组201的剩余容量。
50.附接构件23还包括发光单元234。发光单元234例如包括led。在用户正使用工具2进行作业时,发光单元234朝向作业对象发射光。可以通过操作控制面板231来开启(on)和关闭(off)发光单元234。可替代地,发光单元234也可以在触发开关221接通时自动点亮。
51.(2.3)工具系统的总体结构
52.接着,将参考图1来说明根据本实施例的工具系统1的总体结构。
53.如上所述,工具系统1包括便携式工具2、摄像单元5和控制单元3。此外,在本实施例中,工具系统1除了包括工具2(包括电池组201)、摄像单元5和控制单元3之外,还包括存储单元4和通知单元211。注意,存储单元4和通知单元211不是工具系统1的必要构成元件,而是可以适当地省略存储单元4和通知单元211中的至少一个。
54.摄像单元5、控制单元3、存储单元4和通知单元211容纳在工具2的本体20(参见图2的a)中。在本实施例中,例如,摄像单元5和通知单元211可以容纳在筒体21中。控制单元3和存储单元4可以容纳在握持部22或附接构件23中。
55.摄像单元5被配备给工具2,并且生成作为拍摄图像的数据。例如,摄像单元5可以被实现为包括图像传感器和镜头的照相机。在本实施例中,摄像单元5可以容纳在工具2的
本体20(的筒体21)中,并由此以与工具2一体化的方式配备给工具2。摄像单元5被设置成朝向输出轴241的前端,以在用户正使用工具2进行作业时拍摄作业对象的图像。
56.具体地,摄像单元5设置在筒体21的前端部中以朝向输出轴241的前端(即,插口242),使得附接到输出轴241的插口242落在摄像范围内(参见图2的a和图2的b)。摄像单元5的光轴被布置成与输出轴241的转动轴ax1对齐。在本实施例中,摄像单元5被布置成使得其光轴位于从输出轴241的转动轴ax1起的预定范围内、并且转动轴ax1和光轴基本上彼此平行。此外,摄像单元5被配置为在控制单元3被激活时连续拍摄图像,并且以运动照片的形式生成时间序列的拍摄图像并将运动照片输出到控制单元3的处理单元34。
57.通知单元211例如可以被实现为led。通知单元211可以被配备给本体20的筒体21的与输出轴241相反的另一端,以由用户在作业期间容易观看(参见图2的b)。
58.控制单元3例如可以包括包含一个或多于一个处理器和一个或多于一个存储器的微控制器作为其主要构成元件。微控制器通过使一个或多于一个处理器执行一个或多于一个存储器中所存储的程序来进行控制单元3的功能。程序可以预先存储在存储器中。可替代地,程序也可以在存储在诸如存储卡等的非暂时性存储介质中进行分发或者经由远程通信线路下载。换句话说,程序被设计为使得一个或多于一个处理器用作控制单元3。
59.如上所述,控制单元3具有在基于由摄像单元5生成的拍摄图像所识别的作业对象不符合由作业过程定义的作业指示的情况下对工具2的操作施加限制的作业支持功能。另外,控制单元3还被配置为当在进行作业支持启用操作期间发现满足解除条件时,暂停作业支持启用操作,并由此解除对工具2的操作的限制。也就是说,在本实施例中,控制单元3被配置为不总是启用作业支持功能,而是在发现满足某个解除条件时禁用作业支持功能。换句话说,控制单元3被配置为选择性地启用或禁用作业支持功能。
60.控制单元3进行例如驱动控制单元31、摄像控制单元32、操作接受单元33、处理单元34、通知控制单元35、判定单元36和登记单元37的功能。注意,如果在一定时间段内没有向触发开关221或控制面板231(参见图2的a)中输入操作命令,则控制单元3进入休眠模式。当在休眠模式期间向触发开关221或控制面板231中输入任何操作命令时,控制单元3被激活。
61.驱动控制单元31控制驱动单元24。具体地,驱动控制单元31激活驱动单元24,以使输出轴241以由触发开关221的按压深度确定的转动速度并且在由正向/反向开关222(参见图2的a)设置的转动方向上转动。
62.驱动控制单元31还控制驱动单元24,使得紧固转矩变为等于转矩设置(作业设置)。驱动控制单元31具有用于估计紧固转矩的大小的转矩估计功能。在本实施例中,驱动控制单元31基于驱动单元24(马达)的转数或任何其他参数来估计紧固转矩的大小,直到紧固转矩的估计值达到落座判断水平为止。在紧固转矩的估计值达到落座判断水平时,驱动控制单元31基于冲击机构25的冲程数来估计紧固转矩的大小。在发现冲击机构25的冲程数达到了基于转矩设置的阈值次数时,驱动控制单元31判断为紧固转矩应达到了转矩设置,并停止运行驱动单元24(即,马达)。这使得工具2能够用与转矩设置准确匹配的紧固转矩来将紧固构件紧固。后面将详细说明“转矩设置”。
63.摄像控制单元32控制摄像单元5。摄像控制单元32控制摄像单元5以使摄像单元5至少在使用工具2的作业期间拍摄作业对象的图像。以这种方式,摄像控制单元32使摄像单
元5至少在使用工具2的作业期间拍摄作业对象的图像。
64.操作接受单元33具有接受用户的操作命令的功能。在本实施例中,操作接受单元33在接收到在对触发开关221以及控制面板231的多个按压按钮开关232(参见图2的a)进行操作时要产生的操作信号时,接受用户的操作命令。也就是说,在用户操作触发开关221或按压按钮开关232时,根据所进行的操作的类型产生操作信号并且该操作信号被供给到操作接受单元33。操作接受单元33通过接收这样的操作信号来接受用户的操作命令。例如,假定将诸如同时按下触发开关221和按压按钮开关232等的特定操作定义为“解除操作”。在这种情况下,接收到在用户对触发开关221和按压按钮开关232进行这种特定操作时产生的操作信号意味着操作接受单元33接受了解除操作。
65.处理单元34进行基于拍摄图像的处理。处理单元34至少在控制单元3进行作业支持启用操作期间(即,只要作业支持功能启用),基于拍摄图像来进行预定类型的处理。
66.在本实施例中,处理单元34进行用于将多个作业对象中的在拍摄图像中现场拍摄到的作业对象(以下称为“实拍作业对象”)识别为当前作业对象的处理。也就是说,处理单元34具有用于识别当前作业对象(即,工具2被设置在适当位置的作业对象)的功能。具体地,处理单元34使用与多个作业对象相对应的多个基准图像作为模板数据来对拍摄图像进行图案匹配处理,由此识别实拍作业对象。也就是说,处理单元34通过将拍摄图像与同多个作业对象相对应的多个基准图像进行比较来识别在拍摄图像中现场拍摄到的作业对象。处理单元34将如此识别的作业对象辨识为当前作业对象。
67.处理单元34例如通过对从摄像单元5以运动照片格式输出的数据(即,拍摄图像)以帧为单位进行图像处理(图案匹配处理)来识别作业对象。因此,如果作业对象落在摄像单元5的摄像范围内,则处理单元34可以确定摄像单元5现在正在拍摄多个作业对象中的哪个作业对象的图像(即,实拍作业对象是多个作业对象中的哪个作业对象)。多个基准图像存储在存储单元4(图像存储单元41)中。
68.此外,如果如此识别的作业对象不符合由作业过程定义的作业指示,则处理单元34进行对驱动单元24的操作施加限制和发出通知中的至少一个。换句话说,处理单元34判断由处理单元34识别的作业对象(即,实拍作业对象)是否符合由预设作业过程定义的作业指示。也就是说,处理单元34判断由处理单元34识别的作业对象是否与由作业过程中所包括的作业指示指定的作业对象一致。
69.具体地,处理单元34从存储单元4的过程存储单元44提取与实拍作业对象相关联的作业过程的数据。然后,处理单元34判断经受由从过程存储单元44中提取的作业过程所定义的当前作业指示的作业对象是否与被识别为实拍作业对象的作业对象一致。如果这些作业对象彼此一致,则处理单元34判定为所识别的作业对象应符合由作业过程定义的作业指示。另一方面,如果这些作业对象彼此不一致,则处理单元34判定为所识别的作业对象不应符合由作业过程定义的作业指示。
70.在作为这种判断的结果而判定为作业对象不应符合由作业过程定义的作业指示的情况下,处理单元34进行对驱动单元24的操作施加限制和发出通知中的至少一个。如本文所使用的,“通知”不仅包括通知用户,还包括通知例如外部终端(诸如移动通信装置等)。
71.具体地,在判定为作业对象不应符合由作业过程定义的作业指示的情况下,即使触发开关221被拉动,处理单元34也不允许驱动单元24被激活。也就是说,仅在处理单元34
判定为作业对象应符合由作业过程所定义的作业指示的情况下,才允许激活驱动单元24。因此,即使工具2被设置在不符合作业过程的作业对象上的适当位置,驱动单元24也保持停用,由此禁止进行紧固作业。这可以减少按错误顺序进行作业的可能性。可选地,在判定为作业对象不应符合由作业过程所定义的作业指示的情况下,处理单元34可以锁定触发开关221以防止用户在这种情形下拉动触发开关221。
72.另外,在判定为作业对象不应符合由作业过程所定义的作业指示的情况下,处理单元34使通知控制单元35激活通知单元211。因此,通知单元211用作用于向用户通知工具2现在设置在不符合作业过程的作业对象上的适当位置的用户通知单元。
73.也就是说,处理单元34至少进行用于识别作业对象的对象识别处理作为基于拍摄图像的预定处理。换句话说,处理单元34至少进行作业对象的识别作为(预定)处理。另外,处理单元34还进行如下的过程判断处理作为基于拍摄图像的预定处理,该过程判断处理用于将由此识别的作业对象与由作业过程定义的作业指示进行比较并判断它们的对应关系。换句话说,处理单元34进行由此识别的作业对象与由作业过程所定义的作业指示之间的对应关系的判断,作为(预定)处理。如果过程判断处理的结果表明作业对象不符合作业指示,则处理单元34对驱动单元24的操作进行限制和/或进行通知。
74.注意,仅当控制单元3的作业支持功能启用时,处理单元34才进行判断作业对象与由作业过程定义的作业指示之间的对应关系的过程判断处理,并且基于该结果来对驱动单元24的操作施加限制和/或进行通知处理。也就是说,如果控制单元3暂停了作业支持启用操作(即,如果作业支持功能被禁用),则处理单元34不首先进行过程判断处理,并且不基于结果来对驱动单元24的操作施加任何限制和/或进行通知处理。
75.通知控制单元35控制配备给工具2的通知单元211。通知控制单元35优选地使通知单元211在由处理单元34做出的判定是不一致的情形下(即,在判定为作业对象不应符合由作业过程定义的作业指示的情况下)和在处理单元34识别出实拍作业对象的情形下以不同的方式点亮。例如,如果由处理单元34做出的判定是不一致,则通知控制单元35可以使通知单元211以红色点亮。另一方面,如果处理单元34识别出实拍作业对象,则通知控制单元35使通知单元211以绿色点亮。这使得用户能够通过用眼睛检查通知单元211的点亮状态来辨识作业对象是否符合作业过程。可选地,在由处理单元34做出的判定不一致的状态下拉动触发开关221的情况下,通知控制单元35可以使通知单元211点亮。
76.判定单元36被配置为判断在紧固构件附接到待紧固部位时紧固转矩是否是正常的紧固转矩。在这种情况下,判定单元36优选地根据由作业过程定义的作业指示来判断紧固转矩是否为正常的紧固转矩。具体地,由作业过程定义的作业指示包括与作业对象相关联的目标转矩值。这使得判定单元36通过将作业指示中所包括的目标转矩值与紧固转矩进行比较来判断是否正在用由作业指示指定的紧固转矩进行作业。
77.如果例如在检测到冲击机构25的冲程数达到了阈值次数时驱动控制单元31停用了驱动单元24,则判定单元36判定为紧固转矩应是正常的。另一方面,如果例如在冲击机构25的冲程数达到阈值次数之前、驱动控制单元31通过断开触发开关221停用了驱动单元24,则判定单元36判定为紧固转矩应不足(异常)。判定单元36还进行用于将判定结果与待紧固部位相关联地存储在结果存储单元43中的结果存储处理。
78.在这种情况下,根据本实施例的工具2至少具有作业模式和登记模式作为其操作
模式。如本文所使用的,“作业模式”是指用户使用工具2进行某个类型的作业的操作模式。登记模式在本文中是指将多个基准图像存储在图像存储单元41中并且将多个目标转矩值存储在转矩存储单元42中的操作模式。可以通过例如操作控制面板231来切换操作模式。可替代地,也可以通过操作与控制面板231分开设置的另一构件(诸如指拨开关等)来切换操作模式。
79.登记单元37在工具2的操作模式是登记模式的情况下,进行使存储单元4的图像存储单元41存储多个基准图像的图像登记处理和使存储单元4的转矩存储单元42存储多个目标转矩值的转矩登记处理。
80.登记单元37使转矩存储单元42将在紧固构件附接到作业对象时的转矩设置作为转矩登记处理期间的目标转矩值进行存储。具体地,在工具2的操作模式是登记模式的情况下,用户可以通过操作控制面板231来输入任何任意的转矩值,并且驱动控制单元31将所输入的转矩值设置为转矩设置。在紧固构件附接到作业对象时,登记单元37使转矩存储单元42将此时的转矩设置作为目标转矩值进行存储。
81.另外,登记单元37在图像登记处理期间,还使图像存储单元41将通过例如使摄像单元5拍摄作业对象的图像所生成的静止图像作为基准图像进行存储。具体地,如果工具2的操作模式是登记模式,则触发开关221还用作快门释放按钮。也就是说,在触发开关221接通时,摄像单元5生成静止图像。登记单元37使图像存储单元41将静止图像作为基准图像进行存储。
82.也就是说,根据本实施例,如果工具2的操作模式是登记模式,则触发开关221进行作为用于激活驱动单元24的开关的功能和作为用于生成基准图像的快门释放按钮的功能这两者。因此,在工具2的操作模式是登记模式时进行紧固作业使得登记单元37能够将转矩登记处理和图像登记处理彼此并行地进行。具体地,登记单元37使转矩存储单元42将紧固作业期间的转矩设置作为目标转矩值进行存储,并且还使图像存储单元41将紧固作业期间的作业对象的静止图像作为基准图像进行存储。
83.存储单元4例如可以被实现为半导体存储器,并且进行图像存储单元41、转矩存储单元42(目标值存储单元)、结果存储单元43和过程存储单元44的功能。在本实施例中,图像存储单元41、转矩存储单元42、结果存储单元43和过程存储单元44被实现为单个存储器。然而,这仅是示例,并且不应被解释为限制性的。可替代地,这些存储单元41、42、43和44也可以被实现为四个不同的存储器。还可替代地,存储单元4还可以被实现为诸如可附接到工具2以及可从工具2移除的存储卡等的存储介质。
84.图像存储单元41将多个基准图像与多个作业对象相关联地存储。各基准图像是通过拍摄关联的作业对象所获得的静止图像。可选地,单个作业对象可以与通过从各种角度或以多个不同大小拍摄作业对象所获得的多个基准图像相关联。
85.转矩存储单元42将多个目标转矩值(目标值)以与多个作业对象一对一关联的方式存储。如本文所使用的,“目标转矩值”是指在紧固构件附接到关联的作业对象时的紧固转矩的目标值。
86.结果存储单元43将由判定单元36针对多个待紧固部位所获得的判定结果与多个作业对象相关联地存储。推荐了如下:结果存储单元43将由判定单元36获得的判定结果以添加有表示作业时间的时间戳的状态存储。这使得能够在组装线上针对各制品区分作业对
象判定结果。
87.过程存储单元44存储与单个作业过程或多个作业过程有关的数据。如上所述,作业过程意味着应使用工具2进行作业的过程,并且可以是定义应按以何顺序对单个工件的多个作业对象进行作业的数据。
88.(3)操作
89.接着,将参考图3至图6来说明根据本实施例的工具系统1的示例性操作。
90.在以下的示例中,将说明当用户在组装线上进行组装相同类型的两个制品(以下分别称为“第一制品”和“第二制品”)的作业时工具系统1如何操作。假定各制品具有四个作业对象(以下分别称为“第一作业对象、第二作业对象、第三作业对象和第四作业对象”),并且假定用户进行使用工具2将紧固构件附接到这些作业对象中的各作业对象上的作业。
91.(3.1)登记模式
92.首先,将参考图3来说明在组装第一制品时的工具系统1的示例性操作。在这种情况下,假定工具2处于初始状态,在该初始状态下,登记单元37尚未进行图像登记处理和转矩登记处理这两者。也就是说,在初始状态下的工具2中,分别与第一作业对象、第二作业对象、第三作业对象和第四作业对象相对应的第一基准图像至第四基准图像和第一目标转矩值至第四目标转矩值尚未存储在图像存储单元41或转矩存储单元42中。
93.用户将工具2的操作模式设置为登记模式(在s1中)。接着,用户操作控制面板231以输入在紧固构件附接到第一作业对象时的紧固转矩的转矩值(在s2中)。驱动控制单元31将所输入的转矩值设置为针对第一作业对象的转矩设置。然后,用户通过拉动触发开关221来进行将紧固构件附接到第一作业对象上的紧固作业(在s3中)。此时,对第一作业对象进行拍摄,由此生成第一作业对象的静止图像。
94.在紧固作业完成时,登记单元37进行登记处理(包括图像登记处理和转矩登记处理)(在s4中)。具体地,登记单元37进行图像登记处理,该图像登记处理使图像存储单元41将在步骤s3的紧固作业期间生成的第一作业目标的静止图像作为与第一作业目标相关联的第一基准图像进行存储。另外,登记单元37还进行转矩登记处理,该转矩登记处理使转矩存储单元42将在步骤s3的紧固作业期间紧固构件附接到第一作业对象时的转矩设置作为与第一作业对象相关联的第一目标转矩值进行存储。也就是说,第一目标转矩值与第一基准图像相关联。
95.特别地,根据本实施例,处理单元34进行过程判断处理。因此,在登记处理中,目标转矩值被登记成包括在作业指示中。换句话说,在登记处理中,登记作业过程。在该示例中,登记单元37登记作业过程,使得指示要对第一作业对象进行的作业的作业指示成为作业过程中的第一作业指示。具体地,登记单元37将指示要对第一作业对象进行的作业的作业指示作为根据作业过程要“首先”进行的作业工序进行登记,并且该作业指示包括第一目标转矩值。
96.判定单元36进行结果存储处理(在s5中),该结果存储处理使结果存储单元43将表示在紧固构件附接到第一作业对象时的紧固转矩是否是正常紧固转矩的第一判定结果与第一作业对象相关联地存储。
97.另外,用户遵循与第一作业对象相同的作业过程对第二作业对象至第四作业对象按该顺序顺次进行紧固作业。具体地,用户操作控制面板231以输入在紧固构件附接到第二
作业对象时的紧固转矩的转矩值(在s6中),然后进行将紧固构件附接到第二作业对象的紧固作业(在s7中)。此时,生成第二作业对象的静止图像,并且登记单元37进行登记处理(包括图像登记处理和转矩登记处理)(在s8中)。登记单元37将指示要对第二作业对象进行的作业的作业指示作为根据作业过程要“第二”进行的作业工序进行登记,并且该作业指示包括第二目标转矩值。判定单元36进行结果存储处理(在s9中),该结果存储处理使结果存储单元43存储表示步骤s7的紧固作业期间的紧固转矩是否是正常的紧固转矩的第二判定结果。
98.在对第二作业对象的紧固作业完成时,用户对第三作业对象进行紧固作业。具体地,用户操作控制面板231以输入在紧固构件附接到第三作业对象时的紧固转矩的转矩值(在s10中),然后进行将紧固构件附接到第三作业对象的紧固作业(在s11中)。此时,生成第三作业对象的静止图像,并且登记单元37进行登记处理(包括图像登记处理和转矩登记处理)(在s12中)。登记单元37将指示要对第三作业对象进行的作业的作业指示作为根据作业过程要“第三”进行的作业工序进行登记,并且该作业指示包括第三目标转矩值。判定单元36进行结果存储处理(在s13中),该结果存储处理使结果存储单元43存储表示步骤s11的紧固作业期间的紧固转矩是否是正常的紧固转矩的第三判定结果。
99.尽管在图3中未示出,但在对第三作业对象的紧固作业完成时,用户对第四作业对象进行紧固作业。还对第四作业对象进行与步骤s10至s13相同的一系列处理步骤。因此,登记单元37将指示要对第四作业对象进行作业的作业指示作为根据作业过程要“第四”进行的作业工序进行登记,并且该作业指示包括第四目标转矩值。
100.(3.2)作业模式
101.在登记模式下组装第一制品的作业(即,对第一作业对象至第四作业对象的紧固作业)结束时,用户进行组装第二制品的作业。接着,将参考图4来说明在用户进行组装第二制品的作业时的工具系统1的示例性操作。
102.在以下示例中,将说明在控制单元3正进行作业支持启用操作(即,控制单元3的作业支持功能启用)的情形下的工具系统1的示例性操作。将在“(3.3)禁用作业支持功能”部分中说明在发现满足解除条件时控制单元3暂停作业支持启用操作的情形下工具系统1如何操作。
103.用户操作控制面板231以将工具2的操作模式从登记模式切换到作业模式(在s21中)。然后,用户在工具2的操作模式设置为作业模式的状态下进行组装第二制品的作业。
104.首先,为了将紧固构件附接到第一作业对象上,用户将工具2设置在第一作业对象上的适当位置。此时,摄像单元5生成第二制品的第一作业对象的拍摄图像(在s22中)。
105.处理单元34使用由摄像单元5生成的第一作业对象的拍摄图像来进行将第一作业对象识别为实拍作业对象的对象识别处理(在s23中)。此外,处理单元34进行判断由此识别的第一作业对象与由作业过程定义的作业指示之间的对应关系的过程判断处理(在s24中)。也就是说,处理单元34基于摄像单元5所生成的拍摄图像来进行预定处理(即,对象识别处理和过程判断处理)。
106.在进行过程判断处理时,处理单元34判断如此识别的作业对象是否符合由作业过程定义的作业指示,即,作业对象是否符合作业过程。此时,处理单元34将从过程存储单元44读出的作业过程中的下一个作业指示与所识别的实拍作业对象进行比较。在这种情况
下,作业过程中的下一个作业指示(即,要“首先”进行的作业工序的作业指示)是要对第一作业对象进行的作业。因此,处理单元34发现所识别的作业对象和作业指示中所包括的作业对象这两者都与第一作业对象一致。
107.如果在过程判断处理中做出的判定表示一致(即,如果如此识别的作业对象符合由作业过程定义的作业指示),则处理单元34将作业指示中所包括的目标转矩值设置为转矩设置。也就是说,如果所识别的作业对象是第一作业对象,则处理单元34将与第一作业对象相关联的第一目标转矩值设置为转矩设置(在s25中)。
108.更具体地,处理单元34在识别出实拍作业对象时,从转矩存储单元42获取与实拍作业对象相关联的目标转矩值。然后,处理单元34可以将如此获取到的目标转矩值设置为转矩设置。另外,一旦处理单元34识别出了实拍作业对象,处理单元34就将与实拍作业对象相关联的目标转矩值作为转矩设置进行保持,直到在拍摄图像中拍摄到另一作业对象为止。这使得即使例如处理单元34紧挨在开始紧固作业之前已变得不能识别实拍作业对象,也能够以与实拍作业对象相关联的目标转矩值将紧固构件紧固。
109.在这种状态下,用户进行将紧固构件附接到第一作业对象上的紧固作业(在s26中)。判定单元36进行结果存储处理(在s27中),该结果存储处理使结果存储单元43将表示在紧固构件附接到第一作业对象时的紧固转矩是否是正常的紧固转矩的第一判定结果与第一作业对象相关联地存储。
110.另一方面,如果例如用户未能遵循作业过程,则在过程判断处理中做出的判定可能表示不一致,即,所识别的作业对象可能不符合由作业过程定义的作业指示。如果在过程判断处理中做出的判定表示不一致,则限制(暂停)驱动单元24的操作并且使通知单元211点亮。这使得用户能够注意到他或她未能遵循正确的作业过程。
111.另外,用户遵循与第一作业对象相同的作业过程对第二作业对象至第四作业对象按该顺序顺次进行紧固作业。具体地,为了将紧固构件附接到第二作业对象上,用户将工具2设置在第二作业对象上的适当位置。此时,摄像单元5生成第二作业对象的拍摄图像(在s28中)。处理单元34使用所生成的第二作业对象的拍摄图像来进行将第二作业对象识别为实拍作业对象的对象识别处理(在s29中)。此外,处理单元34进行判断由此识别的第二作业对象与由作业过程定义的作业指示之间的对应关系的过程判断处理(在s30中)。在这种情况下,作业过程中的下一个作业指示(即,要“第二”进行的作业工序的作业指示)是要对第二作业对象进行的作业。因此,处理单元34发现所识别的作业对象和作业指示中所包括的作业对象这两者都与第二作业对象一致。
112.因此,处理单元34将与第二作业对象相关联的第二目标转矩值设置为转矩设置(在s31中)。在这种状态下,用户进行将紧固构件附接到第二作业对象上的紧固作业(在s32中)。判定单元36进行结果存储处理(在s33中),该结果存储处理使结果存储单元43将表示在紧固构件附接至第二作业对象时的紧固转矩是否是正常的紧固转矩的第二判定结果与第二作业对象相关联地存储。
113.在对第二作业对象的紧固作业完成时,用户对第三作业对象进行紧固作业。具体地,为了将紧固构件附接到第三作业对象上,用户将工具2设置在第三作业对象上的适当位置。此时,摄像单元5生成第三作业对象的拍摄图像(在s34中)。然后,处理单元34使用所生成的第三作业对象的拍摄图像来进行将第三作业对象识别为实拍作业对象的对象识别处
理(在s35中)。此外,处理单元34进行判断由此识别的第三作业对象与由作业过程定义的作业指示之间的对应关系的过程判断处理(在s36中)。在这种情况下,作业过程中的下一个作业指示(即,要“第三”进行的作业工序的作业指示)是要对第三作业对象进行的作业。因此,处理单元34发现所识别的作业对象和作业指示中所包括的作业对象这两者都与第三作业对象一致。
114.因此,处理单元34将与第三作业对象相关联的第三目标转矩值设置为转矩设置(在s37中)。在这种状态下,用户进行将紧固构件附接到第三作业对象上的紧固作业(在s38中)。判定单元36进行结果存储处理(在s39中),该结果存储处理使结果存储单元43将表示在紧固构件附接至第三作业对象时的紧固转矩是否是正常的紧固转矩的第三判定结果与第三作业对象相关联地存储。
115.尽管在图4中未示出,但在对第三作业对象的紧固作业完成时,用户对第四作业对象进行紧固作业。还对第四作业对象进行与步骤s34至s39相同的一系列处理步骤。因此,处理单元34使用由摄像单元5生成的第四作业对象的拍摄图像来将第四作业对象识别为实拍作业对象,并判断由此识别的第四作业对象与由作业过程定义的作业指示之间的对应关系。然后,处理单元34将与第四作业对象相关联的第四目标转矩值设置为转矩设置。
116.图5是大体示出在控制单元3进行作业支持启用操作期间(即,在控制单元3的作业支持功能启用期间)工具系统1如何操作的流程图。如从图5清楚地看出,控制单元3在作业支持功能启用期间逐一地顺次进行多个处理。
117.具体地,控制单元3判断工具2的操作模式是否是作业模式(在s101中)。如果工具2的操作模式不是作业模式(如果在s101中回答为“否”),则控制单元3重复地进行该处理步骤s101。另一方面,如果工具2的操作模式是作业模式(如果在s101中回答为“是”),则控制单元3进入下一处理步骤s102,在该处理步骤s102中,控制单元3使处理单元34将如由根据作业过程的作业指示表示的作业处理顺序n设置为“1”(在s102中)。之后,控制单元3使摄像控制单元32控制摄像单元5拍摄作业对象的图像,由此使摄像单元5生成拍摄图像(在s103中)。
118.接着,控制单元3使处理单元34进行用于使用拍摄图像来将该拍摄图像中所拍摄到的作业对象识别为实拍作业对象的对象识别处理(在s104中)。然后,控制单元3使处理单元34进行用于判断由此识别的作业对象与由作业过程定义的作业指示之间的对应关系的过程判断处理(在s105中)。在该处理步骤中,处理单元34判断基于拍摄图像所识别的作业对象(即,实拍作业对象)是否与作业处理顺序n的作业指示中所包括的作业对象一致。
119.如果在过程判断处理中做出的决定表示一致(即,如果在s105中回答为“是”),即,如果如此识别的作业对象符合由作业过程定义的作业指示,则控制单元3使处理单元34将作业指示中所包括的目标转矩值设置为转矩设置(在s106中)。如果使用工具2进行紧固构件的紧固作业,则控制单元3使判定单元36将此时的作业的结果(即,表示紧固构件的紧固转矩是否正常的判定)存储在结果存储单元43中(在s107中)。然后,控制单元3使处理单元34将与由作业过程定义的作业指示相对应的作业处理顺序n增加1(在s108中),并且判断根据作业过程的每个作业是否已完成(在s109中)。在这种情况下,如果增加后的作业处理顺序n比与由作业过程定义的最后作业指示相对应的作业处理顺序大,则控制单元3判定为每个作业均应已完成(即,在s109中回答为“是”)以结束作业模式中的一系列处理步骤。另一
方面,如果不是每个作业都已完成(如果在s109中回答为“否”),则控制单元3返回到处理步骤s103以对下一作业对象重复地进行相同系列的处理步骤。
120.另一方面,如果在过程判断处理中做出的决定表示不一致(如果在s105中回答为“否”),即,如果如此识别的作业对象不符合由作业过程定义的作业指示,则控制单元3使处理单元34限制(暂停)驱动单元24的操作(在s110中)。然后,控制单元3使通知控制单元35点亮通知单元211,由此向用户通知他或她未能遵循正确的作业过程(在s111中)。之后,控制单元3返回到处理步骤s103以重新进行相同系列的处理步骤。
121.注意,图5所示的流程图仅示出工具系统1的示例性操作。因此,图5所示的处理步骤可以适当地按不同的顺序进行,可以根据需要进行附加的处理步骤,或者可以适当地省略这些处理步骤中的至少一个。
122.(3.3)禁用作业支持功能
123.接着,将参考图6来说明在控制单元3暂停作业支持启用操作的情况下(即,在控制单元3禁用作业支持功能的情况下)工具系统1如何操作。
124.具体地,在本实施例中,如上所述,控制单元3被配置为选择性地启用或禁用作业支持功能。在作业支持功能启用期间,如在“(3.2)作业模式”部分中已经说明的,控制单元3在发现基于由摄像单元5生成的拍摄图像所识别的作业对象不符合由作业过程定义的作业指示时,对工具2的操作施加限制。另一方面,当在进行作业支持启用操作期间发现满足预定解除条件时,控制单元3暂停作业支持启用操作,即,禁用作业支持功能。
125.然后,在作业支持启用操作暂停的状态下,可以在驱动单元24的操作不受作业支持功能限制的情况下(即,在不受限制地激活驱动单元24的情况下)任意驱动工具2。因此,在作业支持功能被禁用的情况下,控制单元3基本上解除对工具2(的驱动单元24)的操作的限制。也就是说,根据本实施例,当在进行作业支持启用操作期间发现满足预定解除条件时,控制单元3暂停作业支持启用操作并且解除对工具2的操作的限制。
126.在这种情况下,解除条件包括操作接受单元33接受用户的用于解除的操作命令(以下称为“用户的解除操作”)的条件。特别地,在本实施例中,将操作接受单元33接受用户的解除操作设置为唯一的解除条件。换句话说,解除操作本身就是解除条件。一旦在控制单元3进行作业支持启用操作期间操作接受单元33接受用户的解除操作,控制单元3立即暂停作业支持启用操作。
127.在以下示例中,假定将同时按下触发开关221和按压按钮开关232的操作定义为“解除操作”。因此,用户同时按下触发开关221和按压按钮开关232意味着用户进行了解除操作。也就是说,这使得用户能够通过例如在作业支持功能启用的状态下在按下按压按钮开关232的同时拉动触发开关221,来进行解除操作并由此禁用控制单元3的作业支持功能。因此,在用户正遵循作业过程进行他或她的作业时,例如即使在一旦完成了作业的紧固构件需要被进一步拧紧或需要从头开始经受重新拧紧的情况下、或者在需要进行不规则类型的作业的情况下,该用户也能够仅通过进行解除操作来有意地解除对工具2的操作的限制。
128.此外,在本实施例中,控制单元3当在暂停作业支持启用操作期间发现满足返回条件时,返回到作业支持启用操作。也就是说,根据本实施例,即使在作业支持功能启用的状态下(即,在控制单元3正进行作业支持启用操作期间)作业支持功能一旦被禁用,控制单元3也仍能够通过之后再次启用作业支持功能来返回到作业支持启用操作。换句话说,当在暂
停作业支持启用操作期间发现满足预定返回条件时,控制单元3返回到作业支持启用操作,即,启用作业支持功能。然后,一旦控制单元3返回到作业支持启用操作,控制单元3在发现基于由摄像单元5生成的拍摄图像所识别的作业对象不符合由作业过程定义的作业指示时,就对工具2的操作施加限制。
129.在这种情况下,返回条件包括操作接受单元33接受用户的用于返回的操作命令(以下称为“用户的返回操作”)的条件。特别地,在本实施例中,将操作接受单元33接受用户的返回操作设置为唯一的返回条件。换句话说,返回操作本身就是返回条件。一旦在控制单元3暂停作业支持启用操作期间操作接受单元33接受用户的返回操作,控制单元3立即返回到作业支持启用操作。
130.在以下示例中,假定将同时按下触发开关221和按压按钮开关232的操作定义为“返回操作”。因此,用户同时按下触发开关221和按压按钮开关232意味着用户进行了返回操作。也就是说,这使得用户能够通过例如在作业支持功能禁用的状态下在按下按压按钮开关232的同时拉动触发开关221,来进行返回操作并由此启用控制单元3的作业支持功能。因此,例如,即使在紧固构件需要被进一步拧紧或需要从头开始经受重新拧紧的情况下、或者在需要进行不规则类型的作业的情况下,也允许用户仅通过进行返回操作来有意地通过作业支持功能再次限制工具2的操作。
131.如上所述,控制单元3在作业支持功能启用期间顺次进行多个处理(参见图5)。因此,当在一旦暂停了作业支持启用操作之后返回到作业支持启用操作时,关于控制单元3从多个处理中的哪个处理重新开始作业支持启用操作,控制单元3可以以各种模式重新开始作业支持启用操作。在本实施例中,控制单元3至少具有以下三个返回模式(在下文将分别称为“第一返回模式、第二返回模式和第三返回模式”)。
132.具体地,根据第一返回模式,当发现满足返回条件时,控制单元3从多个处理中的控制单元3暂停了作业支持启用操作的处理(以下称为“暂停处理”)重新开始作业支持启用操作。例如,如果在对作业处理顺序为第二的第二作业对象进行作业期间暂停了作业支持启用操作,则控制单元3根据第一返回模式从针对第二作业对象的作业起重新开始作业支持启用操作。因此,第一返回模式使得能够在不跳过或重做针对任何作业对象的作业的情况下重新开始先前的作业。换句话说,控制单元3具有如下的功能:当一旦在多个处理中的暂停处理中暂停了作业支持启用操作之后返回到作业支持启用操作时,从多个处理中的暂停处理重新开始作业支持启用操作。
133.根据第二返回模式,当发现满足返回条件时,控制单元3从多个处理中的在控制单元3暂停了作业支持启用操作的处理之后的处理重新开始作业支持启用操作。在以下的说明中,控制单元3暂停了作业支持启用操作的处理在下文将被称为“暂停处理”,并且在暂停处理之后的处理在下文将被称为“后续处理(following process)”。例如,如果在对作业处理顺序为第二的第二作业对象进行作业期间暂停了作业支持启用操作,则控制单元3根据第二返回模式从针对作业处理顺序为第三的第三作业对象的作业起重新开始作业支持启用操作。因此,第二返回模式使得能够在跳过针对作业对象的作业的同时重新开始先前的作业。换句话说,控制单元3具有如下的功能:当一旦在多个处理中的暂停处理中暂停了作业支持启用操作之后返回到作业支持启用操作时,从多个处理中的暂停处理之后的后续处理重新开始作业支持启用操作。
134.根据第三返回模式,当发现满足返回条件时,控制单元3从多个处理中的控制单元3暂停了作业支持启用操作的处理之前的处理重新开始作业支持启用操作。在以下的说明中,控制单元3暂停了作业支持启用操作的处理在下文将被称为“暂停处理”,并且在暂停处理之前的处理在下文将被称为“在先处理(preceding process)”。例如,如果在针对作业处理顺序为第二的第二作业对象进行作业期间暂停了作业支持启用操作,则控制单元3根据第三回复模式从针对作业处理顺序为第一的第一作业对象的作业起重新开始作业支持启用操作。因此,第三返回模式使得能够在对作业对象重做作业的同时重新开始先前的作业。换句话说,控制单元3具有如下的功能:当一旦在多个处理中的暂停处理中暂停了作业支持启用操作之后返回到作业支持启用操作时,从多个处理中的暂停处理之前的在先处理重新开始作业支持启用操作。
135.此外,根据本实施例,根据由操作接受单元33接受的用户的操作命令来判断采用这些第一返回模式至第三返回模式中的哪个返回模式。也就是说,根据由操作接受单元33接受的用户的操作命令来判断控制单元3在返回到作业支持启用操作时从多个处理中的哪个处理重新开始作业支持启用操作。
136.具体地,控制单元3根据所进行的返回操作的类型来选择第一返回模式至第三返回模式中的任一个。在本实施例中,将同时按下触发开关221和按压按钮开关232的操作定义为“返回操作”作为示例。在这种情况下,设置了多个按压按钮开关232,因此根据将多个按压按钮开关232中的哪个用于返回操作来选择第一返回模式至第三返回模式中的任一个。例如,如果同时按下触发开关221以及包括第一至第三按压按钮开关232的多个按压按钮开关232中的第一按压按钮开关232以进行返回操作,则选择第一返回模式。另一方面,如果同时按下触发开关221以及多个按压按钮开关232中的第二按压按钮开关232以进行返回操作,则选择第二返回模式。以相同的方式,如果同时按下触发开关221以及多个按压按钮开关232中的第三按压按钮开关232以进行返回操作,则选择第三返回模式。
137.图6是示出暂停控制单元3的作业支持启用操作的处理(即,禁用作业支持功能的处理)的过程以及重新开始作业支持启用操作的处理(即,启用作业支持功能的处理)的过程的流程图。在本实施例中,暂停控制单元3的作业支持启用操作的处理(即,禁用作业支持功能的处理)是作业模式中的中断处理,并且只要控制单元3正以作业模式进行操作,就可以在任何定时暂停作业支持功能。也就是说,图6所示的流程图示出可以在图5所示的一系列处理步骤s102-s111期间的任何阶段进行的中断处理(即,示出中断流程图)。
138.首先,控制单元3判断操作接受单元33是否接受用户的解除操作(在s201中)。如果操作接受单元33未接受用户的解除操作(如果在s201中回答为“否”),则控制单元3重复地进行该处理步骤s201。
139.另一方面,如果操作接受单元33接受用户的解除操作(例如,在该示例中为同时按下触发开关221和按压按钮开关232)(如果在s201中回答为“是”),则控制单元3禁用作业支持功能并且暂停作业支持启用操作(在s202中)。在该示例中,假定在由于判定为作业处理顺序为第二的第二作业对象不应符合作业指示而导致工具2的操作受到限制并且进行通知的情形下进行用户的解除操作。在这种情况下,暂停处理是进行关于第二作业对象的通知的处理(图5中的s111)。
140.在禁用作业支持功能时,控制单元3在该时间点解除对工具2(的驱动单元24)的操
作的限制(在s203中)。也就是说,除非工具2的操作首先受到作业支持功能的限制,否则不需要控制单元3解除对工具2的操作的限制。如果对工具2的操作施加任何限制,则控制单元3解除该限制。
141.此外,控制单元3使通知控制单元35使通知单元211闪烁,由此做出作业支持功能已禁用的通知(在s204中)。将基本上连续地发布作业支持功能已禁用的通知,直到之后启用作业支持功能为止。这使得用户能够通过查看通知单元211来掌握在驱动单元24的操作不受限制的状态下工具2准备好被任意驱动。在这种状态下,允许用户例如通过使用工具2来进一步拧紧一旦完成了作业的紧固构件、从头开始重新拧紧紧固构件、或者进行不规则类型的作业。
142.之后,控制单元3判断操作接受单元33是否接受用户的返回操作(在s205中)。如果操作接受单元33未接受用户的返回操作(如果在s205中回答为“否”),则控制单元3重复地进行该处理步骤s205。
143.另一方面,如果操作接受单元33接受用户的返回操作(例如,在该示例中为同时按下触发开关221和按压按钮开关232)(如果在s205中回答为“是”),则控制单元3启用作业支持功能并且重新开始作业支持启用操作(在s206中)。此时,控制单元3通过辨识所进行的返回操作的类型来判断应遵循第一返回模式至第三返回模式中的哪个返回模式(在s207中)。如果选择了第一返回模式(如果在s207中回答为“第一”),则控制单元3从暂停处理(即,做出关于第二作业对象的通知的处理(图5所示的s111))重新开始作业支持启用操作(在s208中)。如果选择了第二返回模式(如果在s207中回答为“第二”),则控制单元3从暂停处理之后的处理(即,针对作业处理顺序为第三的第三作业对象的处理)重新开始作业支持启用操作(在s209中)。如果选择了第三返回模式(如果在s207中回答为“第三”),则控制单元3从暂停处理之前的处理(即,针对作业处理顺序为第一的第一作业对象的处理)重新开始作业支持启用操作(在s210中)。
144.此外,控制单元3使通知控制单元35点亮通知单元211,从而做出作业支持功能已启用的通知(在s211中)。
145.控制单元3重复地进行这一系列处理步骤s201-s211作为针对通过图5所示的流程图例示的处理的中断处理。注意,图6所示的流程图仅示出工具系统1的示例性操作。因此,图6所示的处理步骤可以适当地按不同的顺序进行,可以根据需要进行附加的处理步骤,或者可以适当地省略这些处理步骤中的至少一个。
146.(4)变形例
147.注意,上述第一实施例仅是本发明的各种实施例中的典型实施例,并且不应被解释为限制性的。相反,可以在未背离本发明的范围的情况下,根据设计选择或任何其他因素以各种方式容易地修改第一实施例。在本说明书中要参考的图全部是示意图。这些图上例示的各个构成元件的尺寸(包括厚度)的比并不总是反映这些构成元件的实际尺寸比。此外,根据第一实施例的工具系统1的功能也可以被实现为工具管理方法、(计算机)程序或存储有该程序的非暂时性存储介质。根据一方面的工具管理方法包括第一步骤、第二步骤和第三步骤。第一步骤包括:从配备给便携式工具2的摄像单元5获取拍摄图像。工具2包括利用从动力源供给的动力来激活的驱动单元24。第二步骤包括:在基于拍摄图像所识别的工件对象不符合由作业过程定义的作业指示的情况下,对工具2的操作施加限制。第三步骤包
括:在第二步骤期间满足解除条件的情况下,暂停第二步骤并由此解除对工具2的操作的限制。根据另一方面的程序被设计为使得一个或多于一个处理器进行上述的工具管理方法。
148.接着,将逐个列举第一实施例的变形例。注意,可以适当地组合采用以下要说明的变形例。在以下的说明中,具有与上述第一实施例的对应物相同的功能的任何构成元件将由与该对应物的附图标记相同的附图标记指定,并且这里将适当地省略其说明。
149.根据本发明的工具系统1例如在其控制单元3中包括计算机系统。计算机系统可以包括处理器和存储器作为主要硬件组件。可以通过使处理器执行计算机系统的存储器中所存储的程序来进行根据本发明的工具系统1的功能。程序可以预先存储在计算机系统的存储器中。可替代地,程序也可以通过远程通信线路下载,或者在记录在诸如存储卡、光盘或硬盘驱动器(其中的任何对于计算机系统均是可读的)等的一些非暂时性存储介质中之后进行分发。计算机系统的处理器可以由包括半导体集成电路(ic)或大规模集成电路(lsi)的单个或多个电子电路构成。如本文所使用的,诸如ic或lsi等的“集成电路”根据其集成的程度而被称为不同的名称。集成电路的示例包括系统lsi、超大规模集成电路(vlsi)和特大规模集成电路(ulsi)。可选地,还可以采用在制造了lsi之后要编程的现场可编程门阵列(fpga)或者允许重新配置lsi内部的连接或电路区段的重新配置的逻辑器件作为处理器。这些电子电路可以一起集成在单个芯片上或分布在多个芯片上,无论哪种都是适当的。这些多个芯片可以一起聚合在单个装置中或者分布在多个装置中,而没有限制。如本文所使用的,“计算机系统”包括包含一个或多于一个处理器和一个或多于一个存储器的微控制器。因此,微控制器也可以被实现为包括半导体集成电路或大规模集成电路的单个或多个电子电路。
150.此外,在上述实施例中,工具系统1的至少一些功能一起集成在单个外壳(本体20)中。然而,这不是工具系统1的必要配置。可替代地,工具系统1的这些构成元件可以分布在多个不同的外壳中。例如,控制单元3的一些功能可以设置在与工具2的本体20分开设置的外壳中。还可替代地,控制单元3的至少一些功能例如也可以被实现为服务器或云计算系统。
151.注意,工具系统1不必应用于在工厂组装制品的组装线,而是也可以找到任何其他应用。
152.在上述第一实施例中,工具2是冲击扳手。然而,工具2不必是冲击扳手,而是例如也可以是上螺母器或油脉冲扳手。可替代地,工具2例如也可以是用于拧紧螺钉(作为紧固构件)的螺丝起子(包括冲击螺丝起子)。在这种情况下,钻头(诸如螺丝起子钻头等)而不是插口242附接到工具2。此外,工具2不必被配置为由电池组201供电,而是还可以被配置为由ac电源(商用电源)供电。此外,工具2不必是电动工具,而是也可以是气动工具,该气动工具包括利用从空气压缩机(动力源)供给的压缩空气(动力)进行操作的气动马达(驱动单元)。
153.此外,在上述第一实施例中,假定作业对象是单个工件中的多个待紧固部位中的各待紧固部位。然而,这仅是示例,并且不应被解释为限制性的。可替代地,作业对象也可以是具有多个待紧固部位的模块、零件或制品。在这种情况下,单个作业对象的多个待紧固部位可以具有相同的目标转矩值或相互不同的目标转矩值。
154.此外,控制单元3仅需具有作业支持功能。因此,控制单元3除了具有作业支持功能之外,还可以具有各种其他功能。例如,控制单元3可以进行将图像作为日志输出(包括将图
像写入存储器)的处理。这使得控制单元3能够将适合于用户确认或适合于计算机分析的图像作为日志输出。可替代地,控制单元3例如还可以进行向用户指示要进行的作业的处理。在这种情况下,控制单元3可以进行判断已进行的作业是好还是差的处理。
155.可选地,工具2可以包括用于测量紧固转矩的转矩传感器。在这种情况下,驱动控制单元31控制驱动单元24,使得转矩传感器所测量到的紧固转矩变为转矩设置。此外,判定单元36可以通过将转矩传感器的测量结果与目标转矩值进行比较来判断紧固转矩是否正常。在发现转矩传感器的测量结果落在基于目标转矩值的预定范围内的情况下,判定单元36判定为紧固转矩应是正常的紧固转矩。另一方面,在发现转矩传感器的测量结果落在基于目标转矩值的预定范围之外的情况下,判定单元36判定为紧固转矩应是不足的(异常的)紧固转矩。
156.注意,图像登记处理不必是使图像存储单元41将摄像单元5所生成的静止图像作为基准图像进行存储的处理。可替代地,图像登记处理也可以是将从服务器下载的静止图像作为基准图像登记到图像存储单元41的处理、或者将从诸如存储卡等的外部存储器获取到的静止图像作为基准图像登记到图像存储单元41的处理。
157.此外,通知单元211不必是诸如led等的发光单元,而是还可以被实现为诸如液晶显示器或有机电致发光(el)显示器等的图像显示装置。可选地,通知单元211可以通过除显示以外的任何手段进行通知(呈现)。例如,通知单元211也可以被实现为发出声音(包括语音)的扬声器或蜂鸣器。在这种情况下,通知控制单元35优选地使通知单元211在由处理单元34做出的判定表示不一致的情形下和在处理单元34识别出实拍作业对象的情形下发出不同的声音。还可替代地,通知单元211也可以被实现为产生振动的振动器或者用于将通知信号发送到设置在工具2外部的外部终端(诸如移动通信装置等)的发送器。可选地,通知单元211还可以组合地具有选自显示、发出声音、产生振动和建立通信中的两个或多于两个功能。
158.存储单元4可以存储表示要对多个作业对象进行作业工序的预定顺序的作业过程数据。在这种情况下,处理单元34根据作业过程从多个基准图像中选择供在图像处理(图案匹配)中使用的基准图像。具体地,处理单元34从多个基准图像中优先选择与在即将发生的作业工序中要处理的即将来临的作业对象相对应的一个基准图像。如本文所使用的,“即将来临的作业对象”是在上次识别的作业对象之后要处理的作业对象。处理单元34进行将被选择为模板数据的基准图像与拍摄图像进行比较的图像处理。也就是说,处理单元34通过根据作业过程预测下次在拍摄图像中要拍摄的作业对象来选择基准图像。这使得处理单元34能够在更短的时间内识别拍摄图像中所拍摄到的作业对象。
159.可选地,处理单元34还可被配置为通过对摄像单元5所拍摄到的图像进行图像处理来确定附接到工具2的插口242的类型。如本文所使用的,“类型”是用于将不同零件彼此区分开的信息,并且包括与大小(尺寸或长度)、形状或材料有关的至少一个信息。在本实施例中,处理单元34被配置为确定附接到工具2的插口242的长度。处理单元34根据插口242的长度来校正目标转矩值,并将如此校正的目标转矩值设置为转矩设置。例如,处理单元34通过将目标转矩值乘以与插口242的长度相对应的系数来校正与实拍作业对象相关联的目标转矩值,并将如此校正的目标转矩值设置为转矩设置。也就是说,处理单元34控制驱动单元24,使得紧固转矩变为等于校正后的目标转矩值。这可以减少根据插口242的长度的紧固转
矩的偏差。
160.可选地,处理单元34还可被配置为根据所检测到的插口242的长度(或类型)来确定转矩设置。在存储单元4中,存储有与插口242的各种长度一对一地相对应的转矩值。处理单元34从存储单元4获取与所确定的插口242的长度相对应的转矩值,并且将基于如此获取到的转矩值的值设置为转矩设置。例如,处理单元34可以将从存储单元4获取到的转矩值设置为转矩设置。这使得能够以与插口242的类型相对应的转矩值进行紧固作业。
161.此外,摄像单元5所生成的拍摄图像不必是运动照片,而是例如还可以是紧固作业完成时的静止照片。如果拍摄图像是静止照片,则判定单元36使结果存储单元43将图像拍摄单元5所生成的静止照片与判定结果相关联地存储。这使得用户能够确认例如紧固转矩已被证实不足的作业对象的静止照片。
162.摄像单元5不必被配备给本体20的筒体21,而是例如也可被配备给本体20的附接构件23或者电池组201。同样,也可以适当地改变控制单元3、存储单元4和其他组件的布置。
163.此外,要由操作接受单元33接受的用户的操作命令不必通过操作触发开关221或者控制面板231上的多个按压按钮开关232来输入。可替代地,操作接受单元33还可以接受由用户进行的语音输入或手势输入或者由用户施加到工具2的加速度或振动作为用户的操作命令。还可替代地,操作接受单元33还可以在接收到响应于用户对外部终端(诸如移动通信装置等)的操作而从外部终端发送到工具2的操作信号时接受用户的操作命令。仍可替代地,操作接受单元33可以组合地具有从诸如这些等的各种输入部件中选择的两个或多于两个输入部件。
164.此外,解除条件不必是同时按下触发开关221和按压按钮开关232的操作(即,解除操作)。可替代地,解除条件还可以包括诸如长按按压按钮开关232或按下按压按钮开关232两次等的任何其他特定操作。还可替代地,如果操作接受单元33接受除按下触发开关221和按压按钮开关232以外的操作(诸如语音输入或手势输入等)作为用户的操作命令,则这些替代操作中的任何操作均可被认为是解除操作。此外,代替用户的解除操作或除用户的解除操作之外,解除条件还可以包括与例如连续作业时间、一天中的特定时间带或其他传感器的检测结果有关的条件。
165.同样,返回条件也不必是同时按下触发开关221和按压按钮开关232的操作(即,返回操作)。可替代地,返回条件还可以包括诸如长按按压按钮开关232或按下按压按钮开关232两次等的任何其他特定操作。还可替代地,如果操作接受单元33接受除按下触发开关221和按压按钮开关232以外的操作(诸如语音输入或手势输入等)作为用户的操作命令,则这些替代操作中的任何操作均可被认为是返回操作。此外,代替用户的返回操作或除了用户的返回操作之外,返回条件还可以包括与例如自从作业支持功能禁用起所经过的时间、一天中的特定时间带、或者其他传感器的检测结果有关的条件。返回条件和解除条件可以彼此相同或不同。
166.此外,在返回到作业支持启用操作时,控制单元3可以根据由操作接受单元33接受的用户的操作命令而不是通过返回操作的类型来判断控制单元3应从多个处理中的哪个处理重新开始作业支持启用操作。例如,控制单元3可以根据解除操作的类型来选择第一返回模式至第三返回模式中的任一个。可替代地,控制单元3可以根据用户的不同于返回操作和解除操作的操作命令来选择第一返回模式至第三返回模式中的任一个。
167.此外,在返回到作业支持启用操作时,控制单元3根据由操作接受单元33接受的用户的操作来判断控制单元3应从多个处理中的哪个处理重新开始作业支持启用操作。然而,这不是工具系统1的必要特征。可替代地,例如,不论用户的操作命令如何,都可以始终选择第一返回模式、第二返回模式和第三返回模式中的任一个作为每当控制单元3返回到作业支持启用操作时要遵循的模式。
168.(第二实施例)
169.根据第二实施例的工具系统1a如图7所示还包括日志获取单元38,这是与根据第一实施例的工具系统1的主要区别。在以下的说明中,本第二实施例中的具有与上述第一实施例的对应物相同功能的任何构成元件将由与该对应物的附图标记相同的附图标记指定,并且这里将适当地省略其说明。
170.在本实施例中,例如,可以设置日志获取单元38作为要由控制单元3进行的功能其中之一。换句话说,控制单元3包括日志获取单元38。日志获取单元38获取在作业支持启用操作暂停期间的工具2的操作的历史作为日志。也就是说,即使在满足解除条件的情况下作业支持功能被禁用的时间段期间,也可以保留使用工具2的作业的记录作为日志。日志获取单元38获取基于利用冲击机构25的冲程数的紧固转矩的大小以及在作业期间由摄像单元5拍摄到的图像(即,拍摄图像)作为日志,并且使结果存储单元43存储如此获取到的日志。在这种情况下,可以将在作业支持功能被禁用的时间段期间获取到的日志和在作业支持功能启用期间获取到的日志(例如,由判定单元36做出的判定)彼此组合地或彼此可区分地存储在结果存储单元43中。
171.另外,在根据本实施例的工具系统1a中,当返回到作业支持启用操作时,控制单元3自动判断控制单元3从多个处理中的哪个处理重新开始作业支持启用操作,这是与根据第一实施例的工具系统1的另一主要区别。具体地,根据第一实施例,根据由操作接受单元33接受的用户的操作命令来判断应采用第一返回模式至第三返回模式中的哪个返回模式。另一方面,根据本实施例,自动判断应采用第一返回模式至第三返回模式中的哪个返回模式。
172.具体地,控制单元3例如可以通过辨识在作业支持功能被禁用期间利用工具2已进行的作业的类型,来自动判断控制单元3应从多个处理中的哪个处理重新开始作业支持启用操作。例如,如果一旦在作业支持功能被禁用期间完成了作业的紧固构件被进一步拧紧或从头开始经受重新拧紧,则控制单元3选择第一返回模式,并且从暂停处理重新开始作业支持启用操作。作为另一示例,如果例如在作业支持功能被禁用期间由于对象识别处理的错误而导致作业尚未完成的紧固构件已被附接,则控制单元3选择第二返回模式,并且从暂停处理之后的处理重新开始作业支持启用操作。
173.在本实施例中,日志获取单元38不是工具系统1a的必要构成元件。也就是说,可以从第二实施例的配置适当地省略日志获取单元38。
174.可选地,可以适当地组合针对第一实施例(包括其变形例)所述的各种配置来采用针对第二实施例(包括其变形例)所述的配置。
175.(概括)
176.从上述说明可以看出,根据第一方面的工具系统(1,1a)包括便携式工具(2)、摄像单元(5)和控制单元(3)。工具(2)包括利用从动力源供给的动力来激活的驱动单元(24)。摄像单元(5)被配备给工具(2)并且生成拍摄图像。控制单元(3)基于拍摄图像来控制工具
(2)。控制单元(3)具有作业支持功能。作业支持功能是在基于拍摄图像所识别的作业对象不符合由作业过程定义的作业指示的情况下对工具(2)的操作施加限制的功能。控制单元(3)当在进行作业支持启用操作期间发现满足解除条件时,暂停作业支持启用操作,并由此解除对工具(2)的操作的限制。
177.根据该方面,基本上,作业支持功能使得控制单元(3)能够基于由摄像单元(5)生成的拍摄图像来识别作业对象,并且判断用户使用工具(2)正进行的作业是否遵循作业过程。另外,在基于拍摄图像所识别的作业对象不符合由作业过程定义的作业指示的情况下(即,在用户使用工具(2)正进行的作业不遵循作业过程的情况下),控制单元(3)可以对工具(2)的操作施加限制。这使得能够防止进行不符合作业过程的错误作业,并由此支持用户遵照作业过程进行他或她的作业。此外,当在正进行作业支持启用操作期间满足解除条件时,可以暂停作业支持启用操作,并由此可以解除对工具(2)的操作的限制。因此,在用户正遵循作业过程进行他或她的作业时,例如即使在一旦完成了作业的紧固构件需要被进一步拧紧或需要从头开始经受重新拧紧的情况下、或者在需要进行不规则类型的作业的情况下,他或她也仍能够仅通过解除对工具(2)的操作的限制来使用工具(2)进行作业。因此,这实现了有助于提高工具(2)的便利性的优点。
178.在可以结合第一方面来实现的根据第二方面的工具系统(1,1a)中,控制单元(3)当在暂停作业支持启用操作期间发现满足返回条件时,返回到作业支持启用操作。
179.该方面使得即使一旦在作业支持启用操作暂停的情况下解除了对工具(2)的操作的限制,控制单元(3)也能够在之后满足返回条件时重新开始作业支持启用操作。
180.在可以结合第二方面来实现的根据第三方面的工具系统(1,1a)中,控制单元(3)在作业支持功能启用期间顺次进行多个处理。控制单元(3)具有用于当在多个处理中的暂停处理中暂停了作业支持启用操作之后返回到作业支持启用操作时、从多个处理中的暂停处理重新开始作业支持启用操作的功能。
181.该方面使得能够在作业处理中的一旦暂停了作业支持启用操作的点处重新开始作业支持启用操作。
182.在可以结合第二方面或第三方面来实现的根据第四方面的工具系统(1,1a)中,控制单元(3)在作业支持功能启用期间顺次进行多个处理。控制单元(3)具有用于当在多个处理中的暂停处理中暂停了作业支持启用操作之后返回到作业支持启用操作时、从多个处理中的暂停处理之后的处理重新开始作业支持启用操作的功能。
183.该方面使得能够在一旦暂停了作业支持启用操作之后跳过至少一个处理的情况下重新开始作业支持启用操作。
184.在可以结合第二方面到第四方面中任一方面来实现的根据第五方面的工具系统(1,1a)中,控制单元(3)在作业支持功能启用期间顺次进行多个处理。控制单元(3)具有用于当在多个处理中的暂停处理中暂停了作业支持启用操作之后返回到作业支持启用操作时、从多个处理中的暂停处理之前的处理重新开始作业支持启用操作的功能。
185.该方面使得能够通过在一旦暂停了作业支持启用操作之后重做至少一个处理来重新开始作业支持启用操作。
186.在可以结合第二方面到第五方面中任一方面来实现的根据第六方面的工具系统(1,1a)中,返回条件包括操作接受单元(33)接受用户的用于返回的操作命令的条件。
187.该方面使得即使一旦在作业支持启用操作暂停的情况下解除了对工具(2)的操作的限制之后,也能够根据用户的用于返回的操作命令来重新开始作业支持启用操作。
188.在可以结合第二方面到第六方面中任一方面来实现的根据第七方面的工具系统(1,1a)中,控制单元(3)在作业支持功能启用期间顺次进行多个处理。控制单元(3)在返回到作业支持启用操作时自动判断控制单元(3)从多个处理中的哪个处理重新开始作业支持启用操作。
189.该方面使得无需用户指定从多个处理中的哪个处理重新开始操作。
190.在可以结合第二方面到第六方面中任一方面来实现的根据第八方面的工具系统(1,1a)中,控制单元(3)在作业支持功能启用期间顺次进行多个处理。控制单元(3)在返回到作业支持启用操作时,根据由操作接受单元(33)接受的用户的操作命令来判断控制单元(3)从多个处理中的哪个处理重新开始作业支持启用操作。
191.该方面使得用户能够自行指定要从多个处理中的哪个处理重新开始作业支持启用操作。
192.在可以结合第一方面到第八方面中任一方面来实现的根据第九方面的工具系统(1,1a)中,解除条件包括操作接受单元(33)接受用户的用于解除的操作命令的条件。
193.该方面使得能够根据用户的用于解除的操作命令来禁用作业支持功能。
194.可以结合第一方面到第九方面中任一方面来实现的根据第十方面的工具系统(1,1a)还包括日志获取单元(38)。日志获取单元(38)获取在控制单元(3)暂停作业支持启用操作期间的工具(2)的操作历史作为日志。
195.该方面使得能够保留在作业支持启用操作暂停期间的工具(2)的操作历史作为日志。
196.根据第十一方面的工具管理方法包括第一步骤、第二步骤和第三步骤。第一步骤包括从配备给便携式工具(2)的摄像单元(5)获取拍摄图像,该便携式工具(2)包括利用从动力源供给的动力来激活的驱动单元(24)。第二步骤包括:在基于拍摄图像所识别的作业对象不符合由作业过程定义的作业指示的情况下,对工具(2)的操作施加限制。第三步骤包括:在第二步骤期间满足解除条件的情况下,暂停第二步骤,并由此解除对工具(2)的操作的限制。
197.该方面实现了有助于提高工具(2)的便利性的优点。
198.根据第十二方面的程序被设计为使得一个或多于一个处理器进行根据第十一方面的工具管理方法。
199.该方面实现了有助于提高工具(2)的便利性的优点。
200.注意,这些不是本发明的唯一方面,而是根据第一实施例和第二实施例(包括其变形例)的工具系统(1,1a)的各种配置也可以被实现为工具管理方法或程序。
201.注意,根据第二方面至第十方面的构成元素不是工具系统(1,1a)的必要构成元素,而是可以适当地省略。
202.附图标记说明
203.1,1a
ꢀꢀꢀ
工具系统
[0204]2ꢀꢀꢀ
工具
[0205]5ꢀꢀꢀ
摄像单元
[0206]
24
ꢀꢀ
驱动单元
[0207]3ꢀꢀꢀ
控制单元
[0208]
33
ꢀꢀ
操作接受单元
[0209]
38
ꢀꢀ
日志获取单元
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
