1.本发明涉及食品加工设备技术领域,特别涉及一种小龙虾自动去头装置。
背景技术:
2.小龙虾肉质鲜美,是人们在夏季分外喜爱的美食,为了更方便食用,目前涌现出很多小龙虾制品,其中小龙虾虾尾制品占很大比例。加工厂通常采用人工操作的方式去掉小龙虾头部,保留虾尾,再进行加工,效率较低,且虾肉损失较多,卫生方面也难以保证。
3.授权公告号为cn108029740b的中国发明专利公开了一种自动化小龙虾去钳头尾装置,置包括小龙虾去钳装置和小龙虾去头尾装置;小龙虾去钳装置包括虾头定位机构和去钳刀;小龙虾去头尾装置包括去头尾装置支架和去头尾机构,去头尾机构安装在去头尾装置支架上。该装置中小龙虾定位机构和去头尾机构都采用驱动机构直接夹紧,由于小龙虾虾壳厚度不一致,力度控制不当容易对虾造成损坏,且没有设置虾尾展平机构,虾尾卷曲时,去头尾机构难以将虾进行夹取。
技术实现要素:
4.本发明的目的是提供一种小龙虾自动去头装置,具有自动展平虾尾,与小龙虾形状贴合,适用于各种大小的小龙虾,虾尾形态保持良好的效果。
5.本发明的上述技术目的是通过以下技术方案得以实现的:包括机架,所述机架上设有压紧机构,所述压紧机构下方滑动连接有支撑板,所述支撑板由头部支撑板、固定在头部支撑板端部的转轴,所述转轴上转动连接有尾部支撑板,所述机架上设有滑槽,所述头部支撑板滑动连接在滑槽内,所述滑槽一端设有开口,所述头部支撑板底部设有驱动其沿滑槽做直线往复运动的驱动机构,所述机架上设有翻转机构,所述驱动机构驱动尾部支撑板从开口穿出后,所述翻转机构驱动尾部支撑板翻转。
6.通过采用上述技术方案,在对加工小龙虾时,通过人工或自动将小龙虾放置在支撑板上,压紧机构将小龙虾固定在支撑板上,此时小龙虾头部位于支撑板上,尾部悬空,然后驱动机构驱动支撑板向小龙虾尾部方向移动,支撑板在移动时可自动将小龙虾尾部进行展平,同时尾部支撑板从滑槽的开口穿出,然后翻转机构驱动尾部支撑板翻转,即可带动小龙虾尾部进行翻转,实现头尾分离。
7.本发明的进一步设置为:所述压紧机构包括位于支撑板两侧的支撑杆,所述支撑杆顶部铰接有压紧板,所述压紧板包括连接部、弯折部和压紧部,所述连接部与支撑杆相铰接,所述支撑杆上设有限位块,所述连接部上设有供所述限位块嵌入的限位槽,所述限位块嵌入限位槽时,连接部与水平面平行,所述连接部与支撑杆铰接处设有扭簧,所述扭簧的弹力驱动连接部向上翻转使限位槽与限位块相接,两个所述弯折部形成v形进料口,两个所述压紧部形成八字形预压部。
8.通过采用上述技术方案,小龙虾可从v形进料口进入,然后在压力作用下,压紧板向下翻转,两个弯折部分开,小龙虾从v型进料口向下移动,小龙虾放置在支撑板上后,松开
小龙虾,扭簧可驱动两个压紧部相互靠近,对虾背进行压紧,从而将小龙虾固定在支撑板上。
9.本发明的进一步设置为:所述压紧机构还包括滑动连接在机架上的两个压紧杆,所述压紧杆上端套接有套筒,所述套筒与压紧杆之间通过弹簧相连,所述套筒上转动连接有滚轮,所述机架上设有推动滚轮向压紧部方向靠近的推动机构。
10.通过采用上述技术方案,压紧机构还包括两个压紧杆,双向丝杆转动时可驱动推动螺母相互靠近,推动螺母带动两个压紧杆上的滚轮相互靠近,滚轮与压紧部的上端面相接后,可对压紧部施加向下的力,使压紧部将小龙虾固定的的更为牢固,有利于后续翻转虾尾时使头尾分离。
11.本发明的进一步设置为:所述驱动机构包括转动连接在机架上的驱动丝杆,驱动驱动丝杠转动的电机,所述驱动丝杆上螺纹连接有驱动螺母,所述驱动螺母与头部支撑板底部固定连接,所述机架上设有限位块,所述驱动螺母与限位块相接时所述尾部支撑板从开口穿出,所述限位块上设有微动开关,所述微动开关与电机电连接。
12.通过采用上述技术方案,电机通过驱动丝杆和驱动螺母驱动头部支撑板做直线运动,在尾部支撑板还在滑槽内时,头部支撑板推动尾部支撑板一起移动,当驱动螺母与限位块相接时,尾部支撑板全部从开口穿出,此时限位块与微动开关相接触,微动开关控制电机停止转动。
13.本发明的进一步设置为:所述推动机构包括转动连接在机架上的双向丝杆,所述双向丝杆两端分别螺纹连接有两个推动螺母,所述推动螺母与压紧杆底部固定连接,所述驱动丝杆靠近双向丝杆一端固定连接有主动锥齿轮,所述双向丝杆上固定连接有从动锥齿轮,所述主动锥齿轮与从动锥齿轮相啮合。
14.通过采用上述技术方案,驱动丝杆转动时,可通过主动锥齿轮和从动锥齿轮带动双向丝杆转动,从而使支撑板移动的同时,压紧机构将小龙虾压紧,避免支撑板带动小龙虾移位。
15.本发明的进一步设置为:所述翻转机构包括固定连接在机架上的翻转架,所述翻转架上转动连接有扇形齿轮,所述机架上滑动连接有翻转齿条、驱动齿条沿直线往复运动的气缸,所述翻转齿条与扇形齿轮相啮合,所述尾部支撑板靠近扇形齿轮一端固定连接有连接杆,所述连接杆上设有花键,所述扇形齿轮的轴心设置有供花键嵌入的键槽。
16.通过采用上述技术方案,气缸驱动齿条做直线运动时,齿条可到到扇形齿轮旋转,扇形齿轮与尾部支撑板相连时,扇形齿轮可带动尾部支撑板翻转,从而将虾尾拧下。
17.本发明的进一步设置为:所述齿轮的轴心固定连接有连接柱,所述连接柱侧壁对称固定连接有两个夹紧杆,所述夹紧杆上转动连接有夹紧齿轮,所述尾部支撑板两侧设有夹紧齿条,所述夹紧齿条与夹紧齿轮相啮合,所述夹紧齿轮轴心固定连接有夹紧丝杆,所述夹紧丝杆上螺纹连接有夹紧螺母,两个所述夹紧螺母之间固定连接有弹性片。
18.通过采用上述技术方案,当尾部支撑板穿出滑槽时,尾部支撑板两侧的夹紧齿条与夹紧齿轮相啮合,在齿轮不转动时,夹紧齿轮可使尾部支撑板保持水平状态,避免尾部支撑板随意转动。尾部支撑板移动的同时还能带动夹紧齿轮转动,从而驱动夹紧丝杆带动弹性片向下移动,从而将虾尾固定在尾部支撑板上,有利于后续翻转使分离虾尾。
19.本发明的进一步设置为:所述尾部支撑板上倾斜设置有拨片,所述拨片铰接在尾
部支撑板上,所述拨片与尾部支撑板相接处设有扭簧,所述扭簧驱动拨片与尾部支撑板相分离,所述尾部支撑板上设有限制拨片翻转角度的限位板,所述拨片与尾部支撑板形成的夹角在30
°
~60
°
之间。
20.通过采用上述技术方案,在尾部支撑板向翻转机构方向移动时,拨片位于虾尾底部,可推动虾尾,使虾尾展平,当虾尾被翻转后与虾头分离,尾部支撑板向虾头方向移动时,尾部支撑板与虾尾分离,虾尾向下掉落,拨片没有受到虾尾的压力后,扭簧驱动拨片抬起,尾部支撑板继续向虾头方向移动,抬起的拨片可将虾头向前推动,使虾头与压紧机构分离,然后从支撑板上掉落。
21.本发明的有益效果是:
22.1.通过设置头部支撑板和尾部支撑板,尾部支撑板与头部支撑板转动连接,推动尾部支撑板移动时,一方面可对虾尾进行展平,另一方面尾部支撑板可与翻转机构连接,将尾部支撑板上的虾尾进行翻转实现头尾分离。该发明结构简单,通过尾部支撑板即可同时实现虾尾展平和去尾两个动作,操作人员只需将虾头放置在支撑板上即可,操作方便。
23.2.压紧机构包括压紧板组成的预压部,首先通过预压部将虾的位置进行固定,然后在通过压紧杆对虾头进一步压紧,便于工人操作的同时,可保证翻转机构翻转时不带动虾头一起转动,保证去头装置运行的稳定性,提高小龙虾自动去头效率。
24.3.尾部支撑板在展平虾尾的同时,还可带动弹性片向下移动,弹性片的弹性可适应不同虾的大小,且弹性片和尾部支撑板一起可将虾尾牢固的夹住,有利于翻转时将虾尾拧下。
附图说明
25.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
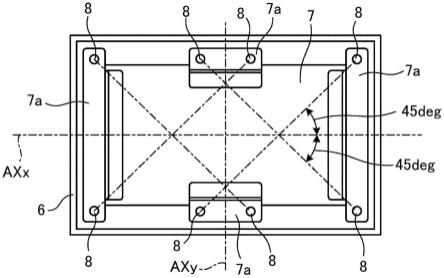
26.图1是本发明结构示意图。
27.图2是本发明爆炸结构示意图。
28.图3是压紧机构结构示意图。
29.图4是本发明底部结构示意图。
30.图5是图4的a处放大示意图。
31.图6是本发明剖面示意图。
32.图中,1、机架;2、压紧机构;21、支撑杆;22、压紧板;22a、连接部;22b、弯折部;22c、压紧部;23、压紧杆;24、套筒;25、滚轮;3、扭簧;4、弹簧;5、推动机构;51、双向丝杆;52、推动螺母;53、主动锥齿轮;54、从动锥齿轮;6、滑槽;7、支撑板;71、头部支撑板;72、尾部支撑板;73、转轴;8、驱动机构;81、驱动丝杆;82、电机;83、驱动螺母;9、限位块;10、微动开关;11、翻转机构;111、翻转架;112、扇形齿轮;113、翻转齿条;114、气缸;115、连接杆;116、花键;117、键槽;12、连接柱;13、夹紧杆;14、夹紧齿轮;15、夹紧齿条;16、夹紧丝杆;17、夹紧螺母;18、弹性片;19、拨片;20、限位板。
具体实施方式
33.下面将结合具体实施例对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例:一种小龙虾自动去头装置,如图1、图6所示,包括机架1,机架1上设有压紧机构2,压紧机构2包括两根支撑杆21,支撑杆21顶部铰接有压紧板22,压紧板22包括连接部22a、弯折部22b和压紧部22c。连接部22a与支撑杆21相铰接,连接部22a与支撑杆21相接处设有扭簧3,支撑杆21上设有限位块9,连接部22a上设有供限位块9嵌入的限位槽,限位块9嵌入限位槽时,连接部22a与水平面平行,扭簧3的弹力驱动限位槽与限位块9相接。两个弯折部22b形成v形进料口,小龙虾虾头从v型进料口放入时,在压力作用下两个弯折部22b分开,使小龙虾可向下移动,两个压紧部22c形成八字形预压部,小龙虾放下后,扭簧3驱动两个压紧部22c相互靠近,两个压紧部22c构成的预压部可对小龙虾虾头进行固定。
35.如图2、图3所示,压紧机构2还包括滑动连接在机架1上的两个7字形压紧杆23,压紧杆23上端套接有套筒24,套筒24与压紧杆23之间通过弹簧4相连,套筒24远离压紧杆23一端转动连接有滚轮25,机架1上设有推动滚轮25向压紧部22c方向靠近的推动机构5。推动机构5推动滚轮25与压紧部22c上表面相接,滚轮25相互靠近时,可给压紧部22c一个向下的力,使压紧部22c能更牢固的将小龙虾固定住,避免虾尾翻转时带动虾头一起转动。
36.如图1、图2所示,两个支撑杆21之间设有滑槽6,滑槽6内滑动连接有支撑板7,支撑板7由头部支撑板71、固定在头部支撑板71端部的转轴73和转动连接在转轴73上的尾部支撑板72组成,滑槽6一端设有开口,头部支撑板71和尾部支撑板72可一起在滑槽6内滑动,尾部支撑板72可完全从开口端穿出,尾部支撑板72完全穿出后,即可绕转轴73进行翻转。
37.如图4、图5所示,头部支撑板71底部设有驱动其沿滑槽6做往复直线运动的驱动机构8,驱动机构8包括转动连接在机架1上的驱动丝杆81,驱动丝杆81一端固定连接有电机82,驱动丝杠上螺纹连接有驱动螺母83,驱动螺母83与头部支撑板71固定连接,电机82转动时带动头部支撑板71沿滑槽6移动。机架1上设有限位块9,驱动螺母83与限位块9相接时,尾部支撑杆21完全从开口穿出,限位块9上设有微动开关10,微动开关10与电机82电连接,限位块9与微动开关10相接触时,微动开关10控制电机82停止转动,使支撑板7保持在特定位置不动。
38.如图4、图5所示,推动机构5包括转动连接在机架1上的双向丝杆51,双向丝杆51两端螺纹连接有两个推动螺母52,推动螺母52与压紧杆23底部固定连接,驱动丝杆81靠近双向丝杠一端固定连接有主动锥齿轮53,双向丝杆51上固定连接有从动锥齿轮54,主动锥齿轮53与从动锥齿轮54相啮合,电机82启动时,还可带动双向丝杠转动,从而驱动两个压紧杆23相互靠近或远离。
39.如图2所示,机架1上设有驱动尾部支撑板72翻转的翻转机构11,翻转机构11包括固定连接在机架1上的翻转架111,翻转架111上转动连接有扇形齿轮112,扇形齿轮112的弧度为180
°
,机架1上滑动连接有翻转齿条113,机架1上固定有驱动翻转齿条113沿直线往复运动的气缸114,翻转齿条113与扇形齿轮112相啮合,齿条移动时,可驱动扇形齿轮112转动。尾部支撑板727靠近扇形齿轮112一端固定连接有连接杆115,连接杆115上设有花键
116,扇形齿轮112的轴心上设置有供花键116嵌入的键槽117,当尾部支撑板72向扇形齿轮112方向移动时,花键116嵌入键槽11内,扇形齿轮112即可带动尾部支撑板72翻转。
40.如图2所示,齿轮的轴心固定连接有连接柱12,连接柱12侧壁对称固定连接有两个夹紧杆13,夹紧杆13上转动连接有夹紧齿轮14,尾部支撑板72两侧设有夹紧齿条15,夹紧齿条15与夹紧齿轮14相啮合,夹紧齿轮14轴心固定连接有夹紧丝杆16,夹紧丝杆16上螺纹连接有夹紧螺母17,两个夹紧螺母17之间固定连接有弹性片18。尾部支撑板72向扇形齿轮112方向移动时,夹紧齿条15与夹紧齿轮14啮合,并取得夹紧齿轮14转动,夹紧齿轮14带动夹紧丝杆16转动,从而驱动夹紧螺母17上下移动,带动弹性片18将虾尾固定在尾部支撑板72上。
41.如图6所示,尾部支撑板72上倾斜设置有拨片19,拨片19铰接在尾部支撑板72上,拨片19与尾部支撑板72相接处设有扭簧3,扭簧3驱动拨片19与尾部支撑板72相分离,尾部支撑板72上设有限制拨片19翻转角度的限位板20,拨片19与尾部支撑板72形成的夹角在30
°
。小龙虾放置在支撑板7上时,小龙虾将拨片19向下压,尾部支撑板72移动时,不会对展平尾部造成影响,反而有利于使尾部展平,当虾尾与虾头分离后,尾部支撑板72向虾头方向移动,拨片19抬起,可将虾头从压紧机构2处拨除,便于放置下一只小龙虾。
42.一种小龙虾自动去头装置工作原理:在处理小龙虾时,首先通过人工或自动装置将小龙虾的虾头从v型进料口放入压紧机构2内,此时支撑板7全部都位于滑槽6内,小龙虾的虾头放置在支撑板7上,虾尾悬空放置,压紧机构2的压紧部22c在扭簧3作用下相互靠近,将小龙虾的位置进行固定;然后启动电机82,电机82通过驱动丝杆81带动支撑板7向虾尾方向移动,尾部支撑板72从虾头底部向虾尾方向移动的过程中,可将虾尾展平,使虾尾平铺在尾部支撑板72上;电机82启动的同时,驱动丝杆81可带动双向丝杆51转动,双向丝杆51上的压紧杆23相互靠近,压紧杆23上的滚轮25与压紧部22c上表面相接,给压紧部22c一个向下的力,使压紧部22c将虾头进一步固定;当驱动丝杆81使驱动螺母83与微动开关10相接时,微动开关10控制电机82停止转动,此时尾部支撑板72已经完全脱离滑槽6,尾部支撑板72通过花键116与扇形齿轮112相连,且尾部支撑板72上的夹紧齿条15驱动弹性片18将虾尾夹紧,启动气缸114,翻转齿条113驱动扇形齿轮112旋转,扇形齿轮112带动尾部支撑板72和翻转机构11一起翻转,将虾头与虾尾分离;再次,气缸114驱动翻转机构11和尾部支撑板72回位,启动电机82,电机82带动尾部支撑板72向虾头方向移动,虾尾失去支撑后掉落,尾部支撑板72上的拨片19抬起将虾头从支撑板7上拨离,即完成了虾头和虾尾分离。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。