技术特征:
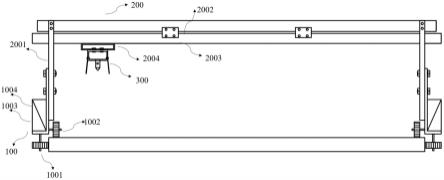
1.一种镀膜机器人,其特征在于:包括行走机构(100)、横梁支架(200)和喷涂模块(300);行走机构(100)包括限位轮(1001)、驱动轮(1002)、电机(1003)和电机驱动系统(1004),限位轮(1001)分别位于组件阵列的上边框(4001)和下边框(4002)外边缘,驱动轮(1002)分别位于上边框(4001)和下边框(4002)上部,驱动轮(1002)连接电机(1003),电机(1003)连接电机驱动系统(1004);行走机构两端固定连接有端面支撑板(2001),端面支撑板(2001)上端连接并支撑横梁支架(200),横梁支架(200)上设有直线驱动单元(2002),直线驱动单元(2002)包括运动轨道(2003)、移动滑块(2004)和驱动控制系统,移动滑块(2004)设于运动轨道(2003)下部;移动滑块(2004)固定连接喷涂模块(300),喷涂模块(300)包括喷枪(3001)、喷涂杆(3002)和防风罩(3003),喷涂杆(3002)固定在移动滑块(2004)底部,若干个喷枪(3001)等间距并排安装在喷涂杆(3002)下部,可拆卸的防风罩(3003)安装在喷涂杆(3002)侧部。2.根据权利要求1所述的镀膜机器人,其特征在于:所述电机(1003)和电机驱动系统(1004)通过型钢架固定。3.根据权利要求1所述的镀膜机器人,其特征在于:所述喷涂模块中的每个喷枪的喷幅≥10cm。4.根据权利要求1所述的镀膜机器人,其特征在于:所述防风罩(3003)为防风导流的弧形结构,防风罩(3003)通过螺栓固定在喷涂杆(3002)两侧,且在防风罩移动前侧的下端通过螺栓安装可拆卸的挡风胶条。5.根据权利要求1所述的镀膜机器人,其特征在于:所述防风罩(3003)内部设有微型液滴回收装置。6.根据权利要求1所述的镀膜机器人,其特征在于:所述驱动轮(1002)和限位轮(1001)均采用柔性连接。7.根据权利要求1所述的镀膜机器人,其特征在于:所述行走机构(100)设有驱动里程计和光耦传感器。8.根据权利要求1所述的镀膜机器人,其特征在于:所述喷枪(3001)是单流体喷枪、二流体喷枪或者超声喷枪。
技术总结
本实用新型涉及镀膜机器人,包括行走机构、横梁支架和喷涂模组;行走机构包括限位轮、驱动轮、电机和电机驱动系统,限位轮分别位于组件阵列的上边框和下边框外边缘,驱动轮分别位于上边框和下边框上部,驱动轮连接电机,电机连接电机驱动系统;行走机构两端固定连接有端面支撑板,端面支撑板上端连接并支撑横梁支架,横梁支架上设有直线驱动单元,直线驱动单元包括运动轨道、移动滑块和驱动控制系统,移动滑块设于运动轨道下部。本实用新型的有益效果是:本实用新型镀膜机器人的喷涂模块行走方向是垂直于行走机构的行走方向的,也就是镀膜机器人沿组件阵列宽度方向移动停止后,喷涂模块开始上下方向移动喷涂,提高了喷涂效果。提高了喷涂效果。提高了喷涂效果。
技术研发人员:贺海晏 寿春晖 金胜利 黄绵吉 邬荣敏 王战 张英驰 陈杰敏 黄超鹏 秦刚华 孙士恩 范海东
受保护的技术使用者:浙江浙能技术研究院有限公司
技术研发日:2021.12.29
技术公布日:2022/6/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。