一种3d视觉引导机器人免编程的喷涂方法及其系统
技术领域
1.本发明涉及机器人喷涂领域,特别涉及一种3d视觉引导机器人免编程的喷涂方法及其系统。
背景技术:
2.现阶段,我国大部分制造工业的喷涂还依靠传统的手工方式进行。为满足用户对漆膜厚度和表观质量的要求,往往需要进行额外的打磨和补喷。导致人工喷涂的劳动强度大、作业效率低,并且长期接触油漆和溶剂对工人的身体有伤害。当前招工难,工资水平不断提高等因素开始困扰各行业。另外,制造业中的工业设备普遍具有结构复杂、对产品质量要求高。解决以上问题就必须考虑机器换人计划,以此来提高生产效率,提高质量降低经营成本。因此,在一般工业制造领域对智能喷涂机器人的需求比较迫切。
3.随着智能制造加速发展,工业机器人快速普及,喷涂机器人也正以喷涂质量高、全自动喷涂效率高、投资回报率高等优势加快对传统喷涂行业的工艺转型。
4.喷涂机器人又叫喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人,喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。可通过手把手示教或点对点编程等方式引导机器人喷涂。喷涂机器人广泛用于家具、陶瓷、卫浴、汽车零部件、金属等工业。
5.目前的喷涂技术需要人工根据物品的形状设计出喷涂轨迹,然后将该喷涂轨迹写成代码,让喷涂机器人执行这个代码。并且,不同形状,不同大小的物品需要逐个进行编程,增加人工成本,效率较低。引入智能机器人喷涂后,喷涂编程还是需要人工,对于产品种类多样的需求时,耗时长、工作量大,迫切需要一种智能免编程的方式。
技术实现要素:
6.本发明提供一种3d视觉引导机器人免编程的喷涂方法及其系统,旨在无需人工预先对不同的物品进行喷涂轨迹的设计,提高了喷涂效率,降低了喷涂成本。
7.本发明提供一种3d视觉引导机器人免编程的喷涂方法,包括以下步骤:s1.获取待喷涂工件的3d点云数据,并对点云数据进行聚类处理;s2.对聚类后的点云数据进行平滑处理,并基于电源数据生成轨迹点;s3.根据轨迹点位计算待喷涂工件的外接矩形,生成喷涂轨迹,并进行点位轨迹规划;s4.根据规划的喷涂轨迹进行横喷和竖喷操作。
8.作为本发明的进一步改进,所述步骤s1包括步骤:s11.相机对待喷涂工件进行拍照,获取多个点云数据之间的距离,设定距离范围
或法线范围,依据欧式距离将距离范围或法线范围的多个点云数据聚成一类,形成不同的物体点云;s12.根据roi或物体高度获取所需物体成像。
9.作为本发明的进一步改进,所述步骤s11中,获取多个点云数据之间的距离包括位姿重复精度统计过程:在空间内,统计各个点云数据位姿的数值,包括最小值、最大值、范围、平均值、标准偏差。
10.作为本发明的进一步改进,所述步骤s2包括步骤:s21.点云数据平滑处理:将获得的点云数据根据参数设置,设定参数浮动范围,将在浮动范围内的点云的坐标均作为一个参数值或缓慢变化的参数值;s22.轨迹点生成:根据相机对待喷涂工件拍照的深度值生成点云及点云法向,根据法向或离群点去除杂质点云,对点云使用欧式聚类将不同物体分开,获取物体点云,基于物体点云生成轨迹点。
11.作为本发明的进一步改进,所述步骤s3包括:s31.根据待喷涂工件的轨迹点,求取工件的外接矩形,对外接矩形按照参数间隔在矩形长宽方向进行划分,对划分点生成有序列规则的z字形轨迹点;s32.对轨迹点再根据对应位置工件的高度调整喷涂的高度。
12.作为本发明的进一步改进,所述步骤s3中,所述外接矩形涵盖一个或多个待喷涂工件构成的轨迹点。
13.本发明还提供一种3d视觉引导机器人免编程的喷涂系统,包括转台、上料工位、3d视觉工位、喷涂工位、下料工位,所述转台上设有多个放置待喷涂工件的托盘,所述转台带动托盘依次在上料工位、3d视觉工位、喷涂工位、下料工位之间转动,所述3d视觉工位上设有相机,所述相机对准位于3d视觉工位上的托盘,所述喷涂工位上设有喷涂机器人,所述喷涂机器人对喷涂工位上的待喷涂工件执行喷涂作业。
14.作为本发明的进一步改进,该系统包括数据处理后台,所述相机拍照获取待喷涂工件的3d点云数据并传输至数据处理后台,所述数据处理后台对点云数据执行聚类处理、平滑处理、计算外接矩形并生成喷涂轨迹,所述数据处理后台将喷涂轨迹数据传输给喷涂机器人,所述喷涂机器人执行对待喷涂工件执行横向和竖向的喷涂作业。
15.本发明的有益效果是:1)针对规则产品,解决人工编程麻烦问题,实现路径自有规划,提升工作效率;2)产品多样化兼容,针对复杂异形产品可保留人工编程;3)优越的3d视觉算法,可实现盲喷、仿形喷、横喷、竖喷等自由路径规划。
附图说明
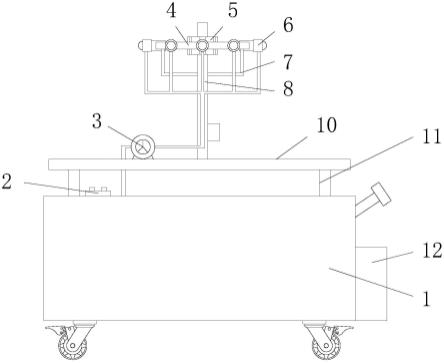
16.图1是本发明中喷涂系统的结构示意图。
具体实施方式
17.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
18.实施例一:本发明的一种3d视觉引导机器人免编程的喷涂方法,对工件进行点云数据进行聚类处理,再对聚类处理后的点云进行平滑处理,得到平滑处理后的点云数据。具体包括以下步骤:s1.获取待喷涂工件的3d点云数据,并对点云数据进行聚类处理;s2.对聚类后的点云数据进行平滑处理,并基于电源数据生成轨迹点;s3.根据轨迹点位计算待喷涂工件的外接矩形,生成喷涂轨迹,并进行点位轨迹规划;外接矩形涵盖一个或多个待喷涂工件构成的轨迹点;s4.根据规划的喷涂轨迹进行横喷和竖喷操作。
19.其中,步骤s1中的聚类算法处理为将设定距离内/法线内的点云聚成一类,包括步骤:s11. 相机对待喷涂工件进行拍照,获取多个点云数据之间的距离,设定距离范围或法线范围,依据欧式距离将距离范围或法线范围的多个点云数据聚成一类,形成不同的物体点云;s12.根据roi或物体高度获取所需物体成像。
20.依据欧氏距离,点与点之间的距离,聚类出不同物体。再根据roi(感兴趣区域)或物体高度获取所需物体。其次需要欧氏距离聚类运算,也称欧几里得距离,是一个通常采用的距离定义,它是在m维空间中两个点之间的真实距离。在二维和三维空间中的欧式距离就是两点之间的距离。使用这个距离,欧式空间成为度量空间。相关联的范数成为欧几里得范数。
21.其中,获取多个点云数据之间的距离包括位姿重复精度统计过程:在空间内,统计各个点云数据位姿的数值,包括最小值、最大值、范围、平均值、标准偏差。
22.最小值、最大值、范围、平均值、标准偏差,是在空间统计重复位姿中的值,在重复统计连续拍照中,与标准位置差值的最小值是多少,最大值是多少,范围是最小值和最大值的相差的范围为多少,平均值是多次定位误差的平均值是多少,标准偏差值是多少,需要被作为考虑的因素,来配合实现点云数据的聚类处理。
23.步骤s2包括步骤:s21.点云数据平滑处理:将获得的点云数据根据参数设置,设定参数浮动范围,将在浮动范围内的点云的坐标均作为一个参数值或缓慢变化的参数值;比如x/y/z向多少浮动内可以将x/y/z认为成一个值,或是缓慢变化的值等。
24.s22.轨迹点生成:根据相机对待喷涂工件拍照的深度值生成点云及点云法向,根据法向或离群点去除杂质点云,对点云使用欧式聚类将不同物体分开,获取物体点云,基于物体点云生成轨迹点。
25.步骤s3中通过计算多工件外接长方体的方式自动生成喷涂轨迹,并进行点位轨迹规划,达到横喷和竖喷的效果,精度可达
±
3mm。具体包括:s31.根据待喷涂工件的轨迹点,求取工件的外接矩形,对外接矩形按照参数间隔在矩形长宽方向进行划分,对划分点生成有序列规则的z字形轨迹点;s32.对轨迹点再根据对应位置工件的高度调整喷涂的高度。
26.本发明的3d视觉引导机器人免编程的喷涂方法可以实现以下功能:
1)外接矩形喷涂轨迹有高度差,可实现不同深度的工件保证工件与喷枪的相对位置关系;2)实现喷涂轨迹的间距可调节,整体矩阵大小可调节,喷枪距离工件的深度可调节性;3)实现实际生产中需要的在a工位进行拍照,b工位进行实际喷涂;4)实现轨迹的横喷,竖喷的可调节性和易用性,轨迹点位可分开发送。
27.实施例二:如图1,本发明的一种3d视觉引导机器人免编程的喷涂系统,包括转台1、上料工位2、3d视觉工位3、喷涂工位4、下料工位5,转台1上设有多个放置待喷涂工件的托盘6,转台1带动托盘6依次在上料工位2、3d视觉工位3、喷涂工位4、下料工位5之间转动,3d视觉工位3上设有相机7,相机7对准位于3d视觉工位3上的托盘6,喷涂工位4上设有喷涂机器人8,喷涂机器人8对喷涂工位4上的待喷涂工件执行喷涂作业。
28.转台1上可以放置有四个托盘6,四个托盘6可以分别对应上料工位2、3d视觉工位3、喷涂工位4、下料工位5的四个工位,实现四个工位同时作业的过程,提高了喷涂效率。相机7通过支架9架设在3d视觉工位3上方,相机7可以采用3d激光扫描相机,对待喷涂工件进行3d扫描,以获取点位数据。
29.3d视觉引导机器人免编程的喷涂系统还包括数据处理后台,相机7拍照获取待喷涂工件的3d点云数据并传输至数据处理后台,数据处理后台对点云数据执行聚类处理、平滑处理、计算外接矩形并生成喷涂轨迹,数据处理后台将喷涂轨迹数据传输给喷涂机器人8,喷涂机器人8执行对待喷涂工件执行横向和竖向的喷涂作业。
30.本发明的优势为:1)一台智能喷涂机器人8可以代替2-3名喷涂工人,降低了生产成本,也提高了生产效率;2)喷涂机器人8不仅是替代人工进行喷涂作业,提高了喷涂产品良率,同时也可以提高整个加工工厂的数字化水平。机器人采用工业互联的接口,可以实时收集机器人的各类数据,对机器人进行实时监控、远程操作、远程诊断;3)喷涂质量上,喷涂的油漆厚度均匀度可达175um,误差在正负10um,而超过5年经验喷涂师傅正负25um左右。此外,通过机器人本体和3d激光扫描硬件,大幅降低喷涂机器人的成本;4)兼容产品多样性,实现免编程,大幅降低人工劳动强度,实现自动化、智能化、数字化喷涂。
31.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。