1.本发明属于超快光学成像领域,具体涉及一种基于时间展宽的超快全息显微成像方法及其系统。
背景技术:
2.实现超短时间分辨率与超快成像速度的光学成像一直是光学成像领域研究的重要方向。现有的探测器,例如电荷耦合元件(ccd)和互补金属氧化物半导体(cmos)相机的时间分辨率成像速度仅能达到亚微秒量级,使用传统的光学架构和光源难以对瞬态的,非重复性的现象进行探测。
3.基于空间展宽的频-时-空映射超快成像是一种分辨率达到皮秒/亚皮秒量级的全光超快成像技术,然而现有的频-时-空映射超快成像装置复杂,搭建成本高,且仅能获取探测目标的二维空间信息,无法探测目标的相位/深度信息。故实现更高维的超快成像技术非常紧迫。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,提供一种基于时间展宽的超快全息显微成像方法及其系统,其可以在单次曝光的情况下实现超短时间分辨率,超快成像速度的三维空间成像。
5.技术方案:为实现上述目的,本发明提供一种基于时间展宽的超快全息显微成像系统,包括:
6.超短脉冲序列产生模块,用于产生照明用的多波长啁啾脉冲序列;
7.全息成像光谱仪,用于根据多波长啁啾脉冲序列产生空间离散的多波长离轴全息图序列;
8.全息图重建模块,用于对多波长离轴全息图序列进行重建以获得样品的定量的光学厚度序列。
9.进一步地,所述超短脉冲序列产生模块包括超短脉冲激光器、第一衍射光栅、第二衍射光栅、第一凸透镜、第二凸透镜、数字微反射镜器件和玻璃棒;
10.所述第一衍射光栅用于对超短脉冲激光器产生的脉冲进行色散;
11.所述第一凸透镜用于将色散后的脉冲在数字微反射镜器件上准直成一维的谱线;
12.所述数字微反射镜器件用于对一维谱线进行选择滤波,并且反射给第二凸透镜;
13.所述第二凸透镜和第二衍射光栅用于对滤波后的脉冲进行合束变为平行光脉冲;
14.所述玻璃棒用于对平行光脉冲进行时域展宽。
15.进一步地,所述全息成像光谱仪包括第三凸透镜、成像透镜、分光镜、第一显微物镜、第二显微物镜、第一反射镜、第二反射镜、第三反射镜、第三衍射光栅、ccd相机;
16.所述第三凸透镜用于汇聚超短脉冲序列产生模块产生的脉冲序列;
17.所述分光镜用于将汇聚后的脉冲序列分成物光与参考光;
18.所述第一显微物镜用于将物光投射在样品上,并且收集样品的散射光返回至分光镜;
19.所述第二显微物镜用于将参考光投射至第一反射镜,并且收集经过第一反射镜反射后的参考光至分光镜;
20.所述第一反射镜用于反射参考光至第二显微物镜;
21.所述第二反射镜和第三反射镜用于将平行传播的物光和参考光反射后入射至第三衍射光栅;
22.所述成像透镜用于将第三衍射光栅发出的子脉冲物、参考光投射到ccd相机上的不同位置;
23.所述ccd相机用于捕获离散的多波长离轴全息图序列。
24.进一步地,所述第一反射镜倾斜放置,且倾斜方向与第三衍射光栅色散方向正交,以使成像面上的参考光能够倾斜入射与物光干涉,形成离轴全息图,且减少色散对全息图干涉条纹能见度的影响。
25.一种基于时间展宽的超快全息显微成像方法,包括如下步骤:
26.s1:通过超短脉冲序列产生模块产生多波长啁啾脉冲序列;
27.s2:全息成像光谱仪使用多波长啁啾脉冲序列进行照明,产生空间离散的多波长离轴全息图序列;
28.s3:通过全息图重建模块对多波长离轴全息图序列进行重建,获取定量光学厚度序列,实现三维全息显微成像。
29.进一步地,所述步骤s1中多波长啁啾脉冲序列的产生过程为:
30.超短脉冲激光器发出平行光脉冲,该脉冲经过第一衍射光栅色散,经过第一凸透镜在其后焦面的数字微反射镜器件上准直成一维的谱线,通过对数字微反射镜器件加载二值图像,对一维谱线进行选择滤波,滤波后的脉冲经过第二凸透镜和第二衍射光栅后合束,重新变为平行光脉冲,玻璃棒对平行光脉冲进行时域展宽,形成多波长啁啾脉冲序列。
31.进一步地,所述步骤s2中多波长离轴全息图序列的产生过程为:
32.脉冲序列经过第三凸透镜汇聚后被分光镜分成物光与参考光,物光经过第一显微物镜后投射在其前焦面的样品上,样品的散射光重新被第一显微物镜收集,返回至分光镜;
33.参考光经过第二显微物镜投射在其后焦面上的倾斜的第一反射镜上,参考光被第一反射镜反射后,被第二显微物镜收集再返回至分光镜;
34.由于分光镜的作用,返回的物光与参考光平行的传播,依次经过第二反射镜和第三反射镜的反射后射入到第三衍射光栅,经过第三衍射光栅后,具有不同波长-时间映射的子脉冲物、参考光在x方向上分开,经过成像透镜被投射汇聚在其后焦面的ccd相机上的不同位置,具有相同波长-时间映射的子脉冲物、参考光以一定的夹角投射在ccd相机上的同一位置发生干涉,形成离轴全息图,ccd相机在一次曝光时间内捕获一系列离散的离轴全息图,获取到多波长离轴全息图序列。
35.进一步地,所述步骤s3中使用全息图重建算法对离轴全息图进行重建:
36.其对应的子脉冲波长为λi,全息图表示为g(x,y)=a(x,y) c(x,y)exp(j2πfyx) c
*
(x,y)exp(-j2πfyx),式中a为直流分量,b为调制度,为相位,
*
表示复共轭,fy为全息图条纹空间频率;
37.对g进行傅里叶变换得到g(u,v)=a(u,v) c(u-f
x
,v) c
*
(u f
x
,v),式中a,c,c
*
分别为a,c,c
*
的傅里叶变换,使用低通滤波器将c(u-f
x
,v)滤出并移至频域原点得到c,对其作反傅里叶变换得到c,相位计算为imag表示虚部,real表示实部,对该相位进行二维解包裹后计算到样品的光学厚度为:
38.有益效果:本发明与现有技术相比,针对全息成像光谱仪产生的多波长全息图序列进行重建获取相位序列,再以多波长啁啾脉冲序列各子脉冲波长为标准,获得定量的样品光学厚度序列,能够在单次曝光的情况下实现超短时间分辨率,超快成像速度的三维空间成像,解决了现有方法仅能获取探测目标的二维空间信息的问题,大幅提升了成像效果。
附图说明
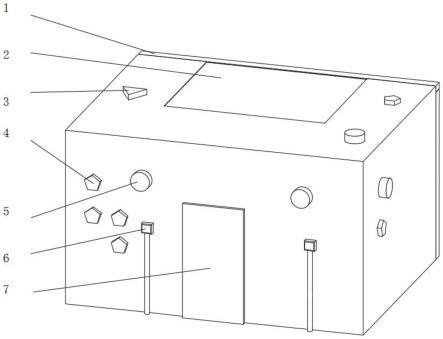
39.图1为本发明提供的基于时间展宽的超快全息显微成像系统示意图;
40.图2为本实施例中超短脉冲序列产生模块产生的多波长啁啾脉冲虚列的频域特征图;
41.图3为本实施例中超短脉冲序列产生模块产生的多波长啁啾脉冲虚列时序特征图;
42.图4为本实施例中相机在一次曝光下采集的10幅空间离散的离轴全息图;
43.图5为本实施例中使用全息图重建算法重建的三维图像序列图。
44.附图1中,1为超短脉冲序列产生模块,2为全息成像光谱仪,101为超短脉冲激光器,102为第一衍射光栅,106为第二衍射光栅,209为第三衍射光栅,103为第一凸透镜,105为第二凸透镜,107为玻璃棒,104为数字微反射镜器件,201为第三凸透镜,210为成像透镜,202为分光镜,203为第一显微物镜,205为第二显微物镜,204为样品,206为第一反射镜,207为第二反射镜,208为第三反射镜,211为ccd相机,212为电脑。
具体实施方式
45.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
46.本发明提供一种基于时间展宽的超快全息显微成像系统,如图1所示,其包括:超短脉冲序列产生模块1、全息成像光谱仪2和全息图重建模块。
47.超短脉冲序列产生模块1包括超短脉冲激光器101、第一衍射光栅102、第二衍射光栅106、第一凸透镜103、第二凸透镜105、数字微反射镜器件104和玻璃棒107。
48.全息成像光谱仪2包括第三凸透镜201、成像透镜210、分光镜202、第一显微物镜203、第二显微物镜205、第一反射镜206、第二反射镜207、第三反射镜208、第三衍射光栅209、ccd相机211。其中,第一反射镜206绕x轴倾斜放置,且倾斜方向与第三衍射光栅209的色散方向正交。
49.全息图重建模块设置于电脑212内,具体为一种全息图重建系统。
50.本实施例中将上述全息显微成像系统对样品204进行三维全息显微成像,提供一种基于时间展宽的超快全息显微成像方法,样品204具体为镀有njnu字样浮雕的反射镜,对
照图1,具体的成像方法为:
51.s1:通过超短脉冲序列产生模块1产生多波长啁啾脉冲序列:
52.超短脉冲激光器101发出中心波长800nm,3db带宽为100nm,脉宽为5.5ps的平行光脉冲,该脉冲经过第一衍射光栅102色散,经过第一凸透镜103在其后焦面的数字微反射镜器件104上准直成一维的谱线,通过对数字微反射镜器件104加载二值图像,对一维谱线进行选择滤波,滤波后的脉冲经过第二凸透镜105和第二衍射光栅106后合束,重新变为平行光脉冲,玻璃棒107对平行光脉冲进行时域展宽,形成多波长啁啾脉冲序列。
53.本实施例中第一衍射光栅102和第二衍射光栅106为600刻线/mm,第一凸透镜103和第二凸透镜105的焦距为100mm,玻璃棒107为3m长的n-sf10材质。
54.如图2所示,经过滤波后的一维谱线共有10根谱线,分别为750nm,760nm,770nm,780nm,790nm,800nm,810nm,820nm,830nm,840nm,每根谱线的宽度为0.25nm;如图3所示,时域展宽后形成的多波长啁啾脉冲序列,共有10个子脉冲,每个子脉冲脉宽为5.3ps,相邻脉冲间隔10ps。
55.s2:全息成像光谱仪2使用多波长啁啾脉冲序列进行照明,产生空间离散的多波长离轴全息图序列:
56.多波长啁啾脉冲序列经过第三凸透镜201汇聚后被分光镜202分成物光与参考光,物光经过第一显微物镜203后投射在其前焦面的样品204上,样品204的散射光重新被第一显微物镜203收集,返回至分光镜202;
57.参考光经过第二显微物镜205投射在其后焦面上的倾斜的第一反射镜206上,参考光被第一反射镜206反射后,被第二显微物镜205收集再返回至分光镜202;
58.由于分光镜202的作用,返回的物光与参考光平行的传播,依次经过第二反射镜207和第三反射镜208的反射后射入到第三衍射光栅209,经过第三衍射光栅209后,具有不同波长-时间映射的子脉冲物、参考光在x方向上分开,经过成像透镜210被投射汇聚在其后焦面的ccd相机211上的不同位置,具有相同波长-时间映射的子脉冲物、参考光以一定的夹角投射在ccd相机211上的同一位置发生干涉,形成离轴全息图,ccd相机211在一次曝光时间内捕获一系列离散的离轴全息图,获取到多波长离轴全息图序列。
59.本实施例中第三凸透镜201的焦距为200mm,成像透镜210的焦距为150mm;第一显微物镜203,第一反射镜206的规格为焦距40mm,na=0.26;第三衍射光栅209为600刻线/mm;ccd相机211规格为像素大小3um,像素数5000
×
1500;每一幅全息图成像视场为200um
×
200um。第一反射镜206放置在第二显微物镜205的前焦面,ccd相机211放置在成像透镜210的后焦面。
60.本实施例中捕获到10幅离轴全息图序列,具体如图4所示。
61.s3:通过全息图重建模块对多波长离轴全息图序列进行重建,获取定量光学厚度序列,实现三维全息显微成像:
62.使用全息图重建算法对10幅离轴全息图进行重建:
63.以10幅全息图中一幅为例,其对应的子脉冲波长为λi,全息图表示为g(x,y)=a(x,y) c(x,y)exp(j2πfyx) c
*
(x,y)exp(-j2πfyx),式中a为直流分量,b为调制度,为相位,
*
表示复共轭,fy为全息图条纹空间频率;
64.对g进行傅里叶变换得到g(u,v)=a(u,v) c(u-f
x
,v) c
*
(u f
x
,v),式中a,c,c
*
分
别为a,c,c
*
的傅里叶变换,使用低通滤波器将c(u-f
x
,v)滤出并移至频域原点得到c,对其作反傅里叶变换得到c,相位计算为imag表示虚部,real表示实部,对该相位进行二维解包裹后计算到样品的光学厚度为:
65.最终获取到如图5所示的三维图像序列图。
66.本实施例中本发明提供的成像系统采用的方案最终的成像速度为6.8
×
1010帧/秒,时间分辨率为5.4ps,每幅视场为200微米
×
200微米,空间分辨率为4.38微米。各方面都要优于现有的成像系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。