用于操作电梯系统的方法
1.本技术是pct国际申请no.pct/ep2015/073436、中国申请号为no.201580054033.7、申请日为2015年10月09日、发明名称为“用于操作电梯系统的方法”的中国专利申请的分案申请。
技术领域
2.本发明涉及用于操作电梯系统的方法,该电梯系统具有能够在至少一个电梯井道中彼此独立地移动的至少两个轿厢,还涉及电梯系统,该电梯系统具有能够在至少一个电梯井道中彼此独立地移动的至少两个轿厢。
背景技术:
3.在电梯系统的多轿厢系统中,多个轿厢能够在共同的电梯井道或多个电梯井道中彼此独立地移动。在这种多轿厢系统中,通常实施有利的安全措施以避免发生轿厢之间的碰撞。
4.例如,这种安全措施涉及第一轿厢将要实施从开始停靠点到目的地停靠点的运输过程的情形。为了避免该第一轿厢与电梯系统的其他轿厢碰撞以及为了确保第一轿厢的安全运输过程,例如,仅仅当电梯系统的其他轿厢没有位于开始停靠点和目的地停靠点之间的区域中时,才实施该运输过程。在本文中,例如参照ep 1 565 396 b1。
5.如果合适,则该系统进行等待,即,第一轿厢停留在开始停靠点,直到所有其他轿厢在相应运输过程中从该区域移出或者甚至已经完全从该区域移出。在特定情形下,这可能导致在第一轿厢开始运输过程之前,第一轿厢中的乘客在开始停靠点处等待较长的时间。
6.这种较长的等待时间通常使乘客感觉非常不愉快。此外,这种较长的等待时间还可能使等待的乘客烦恼和沮丧。一般地,这种等待时间使行驶舒适度变得糟糕以及不利地影响乘客的愉悦感。
7.因此,期望减少在电梯井道中具有多个轿厢的电梯系统中的等待时间。
技术实现要素:
8.本发明提出一种用于操作电梯系统的方法,该电梯系统具有能够在至少一个共同电梯井道中彼此独立地移动的至少两个轿厢,该方法包括以下步骤:其中,由电梯控制器确定至少两个轿厢的第一轿厢以实施从开始停靠点到目的地停靠点的运输过程,其中,由电梯控制器确定第一轿厢的开始时刻和行驶参数,在开始时刻第一轿厢开始从停靠点的运输过程,第一轿厢根据行驶参数实施从开始停靠点到目的地停靠点的运输过程。确定开始时刻和行驶参数时考虑至少两个轿厢的至少一个第二轿厢的状态参数。
9.本发明还提出一种电梯系统,其具有能够在至少一个共同电梯井道中彼此独立地移动的至少两个轿厢,以及具有能够实施这种方法的电梯控制器。
10.在根据本发明的电梯系统中,至少两个轿厢在共同电梯井道或多个共同电梯井道
中移动,特别是彼此独立地移动。在每一个电梯井道中,具体地至少两个轿厢能够彼此独立地移动。本发明还适于转换井道的多轿厢系统,其中,轿厢能够在不同电梯井道之间转换。因此,这种配置还被设置为本发明的另外方面。
11.由电梯控制器确定该至少两个轿厢的第一轿厢以实施从开始停靠点到目的地停靠点的运输过程,特别是在特定电梯井道中的运输过程。
12.根据本发明,电梯控制器确定开始时刻和行驶参数,在该开始时刻第一轿厢开始从停靠点的运输过程,第一轿厢根据该行驶参数实施从开始停靠点到目的地停靠点的运输过程。实施该确定时考虑至少两个轿厢的至少一个第二轿厢的状态参数。具体地,将该至少一个第二轿厢布置在相同的特定电梯井道中。
13.根据本发明,在第一轿厢开始运输过程之前,确定开始时刻和行驶参数使得第一轿厢能够开始从开始停靠点的运输过程,特别是尽可能快地开始该运输过程,以及还能够具体地尽可能快地实施该过程。
14.具体地,对于该确定,在确定时考虑在特定电梯井道中位于开始停靠点和目的地停靠点之间的区域中的那些轿厢的状态参数。具体地,这些状态参数描述相应轿厢当前位于特定电梯井道中的何处和/或相应轿厢当前在何处移动,或者轿厢立刻将要移动到特定电梯井道中的何处。
15.具体地,电梯控制器由状态参数确定相应轿厢的行驶曲线,特别是速度行驶曲线。具体地,这种行驶曲线是相应轿厢在电梯井道中的位置随时间时间变化的函数,或者相应轿厢在电梯井道中的速度随时间或随轿厢的位置变化的函数。具体地,可以通过这种行驶曲线进行外推获得相应轿厢的位置。通过考虑该行驶曲线,具体地,电梯控制器确定用于第一轿厢的行驶曲线,第一轿厢根据该行驶曲线实施运输过程。因此,基于状态参数,电梯控制器确定第一轿厢的行驶参数,以及转而具体地由行驶参数确定第一轿厢的开始时刻和行驶曲线。
16.具体地,提供根据本发明的方法以用于两个轿厢的系统,其中,两个轿厢能够彼此独立地在共同电梯井道中移动。申请人以名称“twin”出售这种两个轿厢的系统。本发明不限于两个轿厢的系统,以及还适于具体地具有合适数量的轿厢的多轿厢系统。
17.为了简化,以下描述将要针对“第二轿厢”或“该第二轿厢”。在不限制普遍性的情况下,以下描述类似地用于“多个第二轿厢”或多个轿厢。
18.这里,电梯控制器可以有益地具体为中央控制单元。具体地,该电梯控制器可以联接或联网到各个轿厢的各个轿厢控制器。这些各个轿厢控制器能够将数据(例如,相应轿厢的位置数据和速度数据)传递到电梯控制器,在确定开始时刻和/或行驶参数时考虑该数据。
19.本发明的优势
20.具体地,确定用于实施运输过程的行驶参数使得可以确定尽可能最早的开始时刻,即,第一轿厢以尽可能地使用户没有等待时间的方式开始运输过程。本发明使乘客在开始停靠点进入的进入时刻和开始时刻之间能够产生最小可能时间间隔。
21.因此,可以确保乘客在进入时刻和开始时刻之间的最短可能等待时间。通过本发明避免不愉快的、令人烦恼的、沮丧的或者较长的等待时间。改善乘客的行驶舒适度和愉悦感。
22.根据本发明,第一轿厢不必等待运输过程开始以及轿厢不必持续停留在开始停靠点,直到第二轿厢移出或者已经移出开始停靠点和目的地停靠点之间的区域为止。
23.通过考虑第二轿厢的状态参数,有益地,第一轿厢可以在第二轿厢仍然在开始停靠点和目的地停靠点之间的区域时开始运输过程。由于状态参数有益地提供与第二轿厢在电梯井道中的何处以及第二轿厢移动到何处有关的信息,所以第一轿厢能够安全地实施运输过程而不产生在第一轿厢和第二轿厢之间的碰撞。
24.因此,本发明使得第一轿厢能够利用行驶参数实施运输过程,与传统运输过程相比这些行驶参数是最佳的。电梯系统的各个轿厢的运输过程通过根据本发明的方法以最佳的方式彼此匹配。通过根据本发明的方法使电梯系统的能量需求最佳并且与已知电梯系统相比降低。此外,例如由于能够避免各个轿厢的不必要的巨大加速或制动,所以有益地减少电梯系统的机械部件的磨损。
25.优选地,如果至少一个第二轿厢位于开始停靠点和目的地停靠点之间的区域中时,则确定第一轿厢的开始时刻和行驶参数时考虑至少一个第二轿厢的状态参数。具体地,至少在记录目的地呼叫时,该至少一个第二轿厢位于开始停靠点和目的地停靠点之间。有益地,即使该至少一个第二轿厢尚未离开在开始停靠点和目的地停靠点之间的区域,第一轿厢通过根据本发明的方法开始运输过程时也考虑至少一个第二轿厢的状态参数。
26.有益地,确定开始时刻和行驶参数使得第一轿厢和至少一个第二轿厢之间不低于最小距离或与速度相关的安全距离。因此,遵循安全规则并且防止两个轿厢彼此相距过近。
27.优选地,将第一轿厢的加速度、制动、最大速度和/或颠簸(由加速和/或制动导致)确定为行驶参数。这些不同的行驶参数导致灵活的组合可能性以用于实施运输过程。颠簸描述加速或制动中的变化。此外,颠簸的结果(即颠簸中的变化)还可以被确定为行驶参数。
28.如果第二轿厢仍然在开始停靠点和目的地停靠点之间的区域中以及在离开所述区域的过程中,则可以例如以最大速度的仅仅50%或正常行驶的加速度的仅仅50%实施运输过程。
29.在其他情形下,例如,如果第二轿厢离开该区域花费较长时间,可以例如以正常行驶的加速度的仅仅25%和/或以正常行驶的最大速度的40%实施运输过程。这里,正常行驶是指当在开始停靠点和目的地停靠点之间的区域中没有轿厢时实施运输过程的情形。
30.本发明此处基于以下认知,即与进入时刻和开始时刻之间的较长等待时间以及随后的电梯轿厢较快行驶相比,用户更易于接受电梯轿厢的较慢行驶并且感觉到更愉快,即使到达时刻在两个情形中是相同。
31.因此,确定行驶参数,特别是以使得在进入时刻和开始时刻之间的等待时间尽可能短的方式确定行驶参数。通常,与运输过程期间的时间相比,在停靠点处的较长等待时间并且门保持开启使乘客感觉更不愉快。具体地,与在运输过程开始前在开始停靠点处花费两倍时长的等待时间相比,以正常行驶的速度的一半行驶(特别是在相对较少数量的楼层上的较短距离的情形下)感觉没有那么不愉快。
32.优选地,例如通过视觉和/或声音显示/指示器装置,在第一轿厢的内部显示第一轿厢的行驶参数,特别是第一轿厢的运输过程的当前行驶参数。与相应正常行程的相应行驶参数相比,第一轿厢的行驶参数(特别是当前行驶参数)可以被显示为绝对值或百分比。此外,可以在第一轿厢的内部显示直到开始时刻的等待时间和/或第一轿厢的到达时刻。
33.优选地,将(至少一个)第二轿厢(特别是在特定电梯井道中的第二轿厢)的当前位置和/或形式的方向作为状态参数考虑。具体地,这些状态参数通过在电梯井道中的合适位置的传感器进行检测和/或能够由相应的轿厢控制器获取。此外,第二轿厢的未来位置也可以作为状态参数考虑。具体地,提前通过外推获得或者计算该未来的位置。可替换地或附加地,优选地,将要由(至少一个)第二轿厢实施的运输过程和/或至少一个第二轿厢的行驶时间、行驶参数作为状态参数考虑。具体地,这些行驶参数是第二轿厢的加速度、制动、振动、速度和/或最大速度。这里的行驶时间是第二轿厢实施相应运输过程所花费的通过外推获得的行驶时间。
34.有益地,这些状态参数可以通过对电梯控制器的部分的相应评估,提供与第二轿厢何时在开始停靠点和目的地停靠点之间的区域中、何时离开该区域以及第二轿厢花费多长时间离开该区域有关的信息。因此,能够以最佳方式确定第一轿厢的运输过程的行驶参数,使得第一轿厢能够尽可能早地开始运输过程以及安全地实施该运输过程(具体为不与第二轿厢发生碰撞以及不低于安全距离)。这里安全距离可以变化,特别是随着轿厢的速度变化,优选地,以使得安全距离在高速情形下比在低速情形下大的方式变化。
35.有益地,将第二轿厢在停靠点处的停靠时间作为状态参数考虑。具体地,在本文中,考虑位于将要由第一轿厢实施的运输过程的开始停靠点和目的地停靠点之间的停靠点的停靠时间。由于通过外推获得的行驶时间,所以已知第二轿厢何时到达这些停靠点。
36.与行驶时间相对比,这种停靠时间通常不能够被确切地确定。行驶时间可以被确切地确定,特别是作为当前行驶参数的函数进行确切地确定。在停靠时间期间,乘客可以离开或者进入第二轿厢。然而,乘客的行为无法进行确切地确定。
37.因此优选地,由随机评估确定停靠时间。例如,通过经验值(例如作为所有停靠时间的平均值)确定停靠时间。此外,可以利用行驶数据或使用数据以用于随机评估。此外,基于呼叫,可以推定多少乘客离开或进入第二轿厢。为此,优选地,可以评估目的地呼叫控制器的信息。
38.为了能够遵循这些预定停靠时间,根据本发明设置为在第二轿厢中实施相应措施。例如,在超过预定停靠时间之后,可以输出指令以关闭第二轿厢的门。因此有益地,防止第二轿厢“延迟”到达和/或防止第一轿厢和第二轿厢彼此相距过近和/或防止低于安全距离。
39.如果例如由于乘客进入第二轿厢与此同时门已经关闭并且门必须再次打开,所以停靠时间无法遵循预定值,则有益地提供相应的措施以避免第一轿厢和第二轿厢碰撞。
40.为此,可以在第一轿厢实施运输过程时有益地改变第一轿厢的行驶参数。电梯控制器通过考虑第二轿厢的状态参数评估或确定在第一轿厢实施运输过程时是否改变第一轿厢的行驶参数。具体地,这里相应地改变行驶参数以防止第一轿厢和第二轿厢之间的碰撞。在适当情况下,还可能需要第一轿厢的强制停靠。具体地,在停靠点处实施这种强制停靠。在本文中,具体地打开第一轿厢的门以避免使乘客沮丧以及以避免被约束的不愉快感觉。如果在两个停靠点之间产生强制停靠,则可以通过视觉和/或声音显示/指示器装置通知乘客。
41.具体地,还可以改变行驶参数使得能够更快地实施运输过程。例如,如果第二轿厢的停靠时间已经被预定为过大值,实际停靠时间因此短于预定停靠时间,就会是这种情况。
42.在一个优选改进例中,在将由第二轿厢实施的运输过程期间,将第二轿厢在预定时间间隔内是否离开开始停靠点和目的地停靠点之间的区域作为状态参数考虑。如果不是该情形,则第二轿厢不必要地堵塞区域以及第一轿厢不能够开始运输过程。
43.在该情形下,优选地,电梯控制器使第二轿厢移动进入开始停靠点和目的地停靠点之间的区域之外的避让停靠点中。具体地,电梯控制器向第二轿厢输出合适的指令。具体地,如果第一轿厢在目的地停靠点处,则与第一轿厢的目的地停靠点相关地选择该避让停靠点,使得第一轿厢和第二轿厢之间不低于安全距离。
44.优选地,确定第一轿厢的行驶参数时考虑电梯系统的能量管理系统。具体地,第一轿厢可以与另外的轿厢(具体为在相反方向上移动的一个轿厢)同步。可以将第一轿厢和该另外轿厢的行驶参数作为彼此的函数进行确定。在这种同步过程中,具体地在相反方向上移动的轿厢能够进行相互调节使得在相反方向上移动的轿厢被设置为基本同时移动。作为一个轿厢向下移动的结果,可以获取另一个轿厢向上移动(瞬间地)使用的能量。因此,具体地可以最优化电梯系统的后续值。因此,可以最优化电梯系统的能量平衡。可以以最佳方式平衡能量需求和能量供给并且可以实现能量平衡。
45.此外,优选地,确定第一轿厢的行驶参数时可以考虑电梯系统的能量消耗和/或部件的磨损。可以优化电梯系统的能量消耗和/或可以减少各个部件的磨损。例如,可以减小第一轿厢的加速度和/或制动,而非减小速度或最大速度。因此,可以避免不必要的巨大加速度或制动以及可以减少各个部件的磨损。
46.具体地,电梯控制器在评估或确定在第一轿厢实施运输过程中是否改变第一轿厢的行驶参数时考虑能量管理系统。具体地,如果电梯系统的能量供给失效或者存在断电,就会是这种情况。可以在断电期间第一轿厢实施运输过程时,由电梯控制器实施第一轿厢的行驶参数的这种改变,特别是根据us 7 540 356 b2中描述的准则实施这种改变。在us 7 540 356 b2中公开了克服电梯系统的断电的可能方式。在断电情形下,轿厢的行驶参数(特别是速度)随着电梯系统中存在的能量和用于克服断电所必须的能量改变。
47.在说明书和附图中可以发现本发明的另外优势和改进例。
48.当然,以上提到的特征和以下仍将解释的那些特征不仅可以在相应规定的组合中使用,在不脱离本发明的范围的情形下还可以在其他组合中或单独地使用。
附图说明
49.基于示例性实施例在附图中示意性地示出本发明,以下将参照附图描述这些示例性实施例。
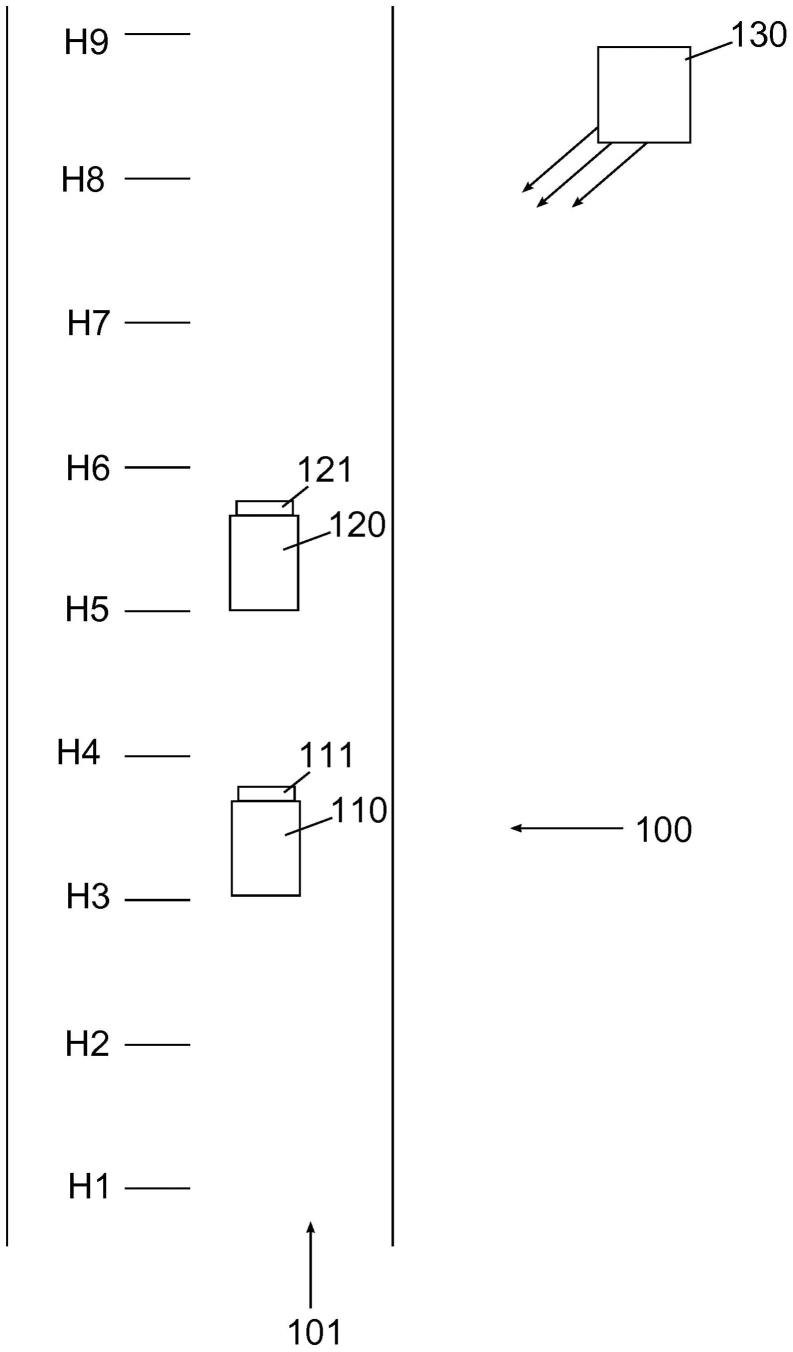
50.图1是根据本发明电梯系统的优选改进例的示意图,该电梯系统被构造为基于根据本发明方法的优选实施例进行操作,
51.图2是根据本发明电梯系统的优选改进例的轿厢行驶曲线的示意图,可以在根据本发明方法的优选实施例的过程中确定该行驶曲线,以及
52.图3是行驶曲线的示意图,在根据本发明方法的另外优选实施例的过程中确定该行驶曲线。
具体实施方式
53.图1是根据本发明电梯系统的优选改进例的示意图,所述电梯系统由100表示。两个轿厢110和120能够在电梯系统100的共同电梯井道101中彼此独立地移动。在该具体示例中,电梯系统100在九个楼层(由附图标记h1到h9表示)上延伸。
54.每一个轿厢110和120具有各自的轿厢控制器111或121。电梯系统100还具有电梯控制器130。电梯控制器130与轿厢控制器111和121彼此相连接,具体地经由合适的通信总线(例如现场总线)彼此相连接。
55.电梯控制器130还构造为实施根据本发明方法的优选实施例。为此,在电梯控制器130中实施根据本发明计算机程序的优选改进例。
56.例如,乘客希望被从第三楼层h3运输到第七楼层h7。为此,乘客在该开始停靠点h3处激活相应的目的地选择控制器。乘客以该方式将目的地楼层h7通知给电梯控制器130。该电梯控制器130将轿厢110确定为第一轿厢,以实施该运输过程。电梯控制器130向第一轿厢110的轿厢控制器111输出指令。该轿厢控制器111相应地致动第一轿厢110,该第一轿厢110被移动到开始停靠点h3。在进入时刻处,乘客进入在开始停靠点h3处的第一轿厢110。
57.然后,电梯控制器130确定开始时刻以及行驶参数以用于从开始停靠点h3到目的地停靠点h7的运输过程。在实施该确定时考虑第二轿厢120的状态参数。
58.第二轿厢120在进入时刻处位于第五楼层h5。第二轿厢120将要实施从第五楼层h5到第六楼层h6的运输过程,以及接下来,实施从第六楼层h6到第九楼层h9的另外的运输过程。电梯控制器130将这两个运输过程、第二轿厢120的相应的行驶参数和第二轿厢120在第五楼层h5和第六楼层h6处的停靠时间作为状态参数考虑以用于确定第一轿厢110的运输过程。
59.电梯控制器130通过行驶数据的统计评估确定第二轿厢120的平均停靠时间。该统计确定的停靠时间被用作用于第五楼层h5和第六楼层h6的预定停靠时间。
60.第二轿厢120的轿厢控制器121将加速度、速度和制动作为行驶参数传递到电梯控制器130。第二轿厢120根据这些行驶参数实施两个运输过程。
61.电梯控制器130将第二轿厢120的行驶曲线确定为第二轿厢120的这些行驶参数的函数以及这些停靠时间的函数。该行驶曲线对应于对电梯井道101中第二轿厢120的位置的外推。
62.通过考虑第二轿厢120的该行驶曲线,电梯控制器130确定第一轿厢110的行驶曲线。对于该行驶曲线,确定第一轿厢110的开始时刻和行驶参数,使得第一轿厢110可以尽可能快地(即,在进入时刻和开始时刻之间存在的时间间隔尽可能最小)开始它的运输过程,以及使得第一轿厢110和第二轿厢120彼此之间不会低于预定的最小距离或与速度相关的安全距离。
63.电梯控制器130将第一轿厢110的加速度、速度和制动确定为行驶参数。电梯控制器130将这些行驶参数和开始时刻传递到轿厢控制器111。轿厢控制器111相应地致动第一轿厢110,使得在开始时刻处利用相应的行驶参数实施从开始停靠点h3到目的地停靠点h7的运输过程。
64.图2在电梯井道101中的轿厢位置x随时间t变化的图表中示意性地示出这些行驶曲线,该行驶曲线由电梯控制器130确定。
65.t0表示进入时刻,在该进入时刻处乘客进入在开始停靠点h3处的第一轿厢110。用于第二轿厢120的行驶曲线由220表示以及由电梯控制器130进行外推获得。通过统计评估由外推获得第二轿厢离开第五楼层的时刻t1。时刻t3和t4表示用于第二轿厢120在第六楼层h6处停靠的、统计确定的停靠时间。电梯控制器130还进行外推使得第二轿厢在时刻t6处到达第九楼层h9。
66.电梯控制器130通过考虑第二轿厢120的该行驶曲线220确定第一轿厢110的行驶曲线210。由t2表示由电梯控制器确定的、第一轿厢110开始运输过程的开始时刻。由t5表示第一轿厢110到达目的地停靠点h7的、通过外推获得的到达时刻。
67.以类似于图2的方式在图3中示出另外的行驶曲线。例如,图3示出第二轿厢120在第六楼层处的实际停靠时间比由电梯控制器进行外推获得的停靠时间长。
68.由221表示第二轿厢120的实际行驶曲线。由图3中的虚线表示根据图2通过外推获得的行驶曲线220,其中,通过外推获得的行驶曲线220与实际行驶曲线221不同。
69.例如,乘客进入在第六楼层处的第二轿厢120,而门已经关闭。因此,门必须再次打开以及该停靠被延长。因此,该停靠在时刻t4(该时刻已经由电梯控制器进行外推获得)处并没有结束,而是在时刻t7处结束。
70.如果第一轿厢110将要根据通过外推获得的行驶曲线210继续运输过程,则由于第二轿厢120的较长停靠造成第一轿厢110和第二轿厢120之间低于安全距离。因此不能确保该安全距离,由电梯控制器130在时刻t7处改变第一轿厢110的行驶参数。在该示例中,减少第一轿厢110的速度。
71.在图3中,由211表示第一轿厢110的实际行驶曲线。由图3中的虚线表示根据图2通过外推获得的行驶曲线210,其中,通过外推获得的行驶曲线210与实际行驶曲线211不同。
72.由于第一轿厢110的速度降低,所以第一轿厢110到目的地楼层h7的到达时刻由时刻t5偏移到时刻t8。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。