1.本实用新型涉及机巢技术领域,具体涉及输电线路巡检自动收放移动式机巢。
背景技术:
2.输电线路巡检对输电线路进行定期巡视检查,随时掌握和了解输电线路的运行情况以及线路周围环境和线路保护区的变化情况,是供电企业一项繁重的日常工作。传统的人工巡检方式无法对地形环境复杂以及条件恶劣等地区的巡检。线路巡检无人机由于具有迅速快捷、工作效率高、不受地域影响以及安全性高等优点,被应用在输电线路巡检工作中。
3.线路巡检无人机在使用后,需要放置在机巢内进行保存。但是,现有的无人机机巢无法实现自动收放,因此,需要对现有的无人机机巢进行改进。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型提供的输电线路巡检自动收放移动式机巢,能够实现机巢本体的自动收放。
5.为了解决上述技术问题,本实用新型提出以下技术方案:
6.输电线路巡检自动收放移动式机巢,包括机巢本体和设置在机巢本体两侧的盖板,机巢本体的内部设有停机坪和用于驱动停机坪升降的升降机构,升降机构安装在机巢本体的底部,停机坪上设置有用于检测无人机降落到停机坪上的检测组件,停机坪的两侧均设置有用于推动或拉动盖板的连动组件,机巢本体内安装有无线通信设备,升降机构和无线通信设备均与控制器电连接。
7.进一步地,所述连动组件包括连杆、v型杆和滑块,连杆安装在停机坪的侧边缘,v型杆的一端穿过连杆顶端的通孔,v型杆的折弯部与机巢本体侧壁的上方铰接,v型杆的另一端与滑块铰接,滑块与盖板滑动连接。
8.进一步地,所述v型杆穿过通孔的一端安装有弧形挡块。
9.进一步地,所述停机坪的中心区域对称的开设有两个用于放置无人机支架的凹槽,检测组件包括两个压力传感器,两个压力传感器分别安装在两个凹槽内,两个压力传感器均与控制器电连接。
10.进一步地,所述盖板与机巢本体铰接,盖板上安装有弹性按压块。
11.进一步地,所述v型杆的夹角小于90度。
12.进一步地,所述停机坪上安装有充电器,充电器通过连接线与机巢本体上的电源接口连接,控制器和升降机构均与电源接口电连接。
13.由上述技术方案可知,本实用新型的有益效果:控制器通过无线通信设备与控制中心和无人机通信,当需要使用无人机时,控制中心向控制器发送控制指令,控制器收到控制指令后向无人机发送起飞指令,同时,控制器控制升降机构上升,带动停机坪上升,停机坪上的连动组件推动两个盖板开启,当升降机构上升到最大高度时,无人机起飞;当无人机
使用完成后,控制中心向控制器发送控制指令,控制器收到控制指令后向无人机发送降落指令,当检测组件检测到无人机降落到停机坪上时,控制器控制升降机构下降,带动停机坪下降,停机坪上的连动组件拉动两个盖板关闭,能够实现机巢本体的自动收放。
附图说明
14.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
15.图1为本实用新型的结构示意图;
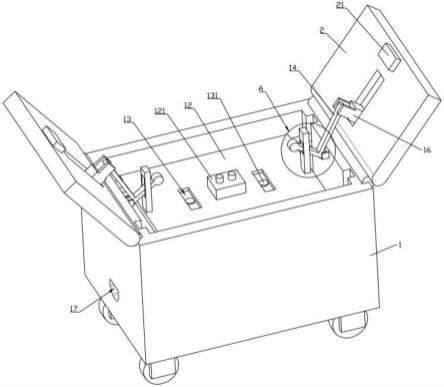
16.图2为本实用新型机巢本体内部的结构示意图;
17.图3为本实用新型a处的放大图。
18.附图标记:
19.1-机巢本体;2-盖板;
20.11-升降机构;12-停机坪;13-凹槽;14-连杆;15-v型杆;16-滑块; 17-电源接口;21-弹性按压块;
21.121-充电器;131-压力传感器;141-通孔;151-弧形挡块。
具体实施方式
22.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
23.参阅图1-图3所示,本实施例提供的输电线路巡检自动收放移动式机巢,包括机巢本体1和设置在机巢本体1两侧的盖板2,机巢本体1的内部设有停机坪 12和用于驱动停机坪12升降的升降机构11,升降机构11安装在机巢本体1的底部,停机坪12上设置有用于检测无人机降落到停机坪12上的检测组件,停机坪12的两侧均设置有用于推动或拉动盖板2的连动组件,机巢本体1内安装有无线通信设备,升降机构11和无线通信设备均与控制器电连接。控制器为stm32 单片机控制器。升降机构11为电动伸缩杆或电缸。无线通信设备为wifi通信模块或4g通信模块。
24.在实际使用中,控制器通过无线通信设备与控制中心和无人机通信,当需要使用无人机时,控制中心向控制器发送控制指令,控制器收到控制指令后向无人机发送起飞指令,同时,控制器控制升降机构11上升,带动停机坪12上升,停机坪12上的连动组件推动两个盖板2开启,当升降机构11上升到最大高度时,无人机起飞;当无人机使用完成后,控制中心向控制器发送控制指令,控制器收到控制指令后向无人机发送降落指令,当检测组件检测到无人机降落到停机坪 12上时,控制器控制升降机构11下降,带动停机坪12下降,停机坪12上的连动组件拉动两个盖板2关闭,能够实现机巢本体1的自动收放。
25.在本实施例中,连动组件包括连杆14、v型杆15和滑块16,连杆14安装在停机坪12的侧边缘,v型杆15的一端穿过连杆14顶端的通孔141,v型杆15 的折弯部与机巢本体1侧壁的上方铰接,v型杆15的另一端与滑块16铰接,滑块16与盖板2滑动连接。
26.在实际使用中,停机坪12上升过程中,带动连杆14上升,连杆14推动v 型杆15的一端升降,从而改变v型杆15另一端的位置,通过v型杆15带动盖板2的开启或关闭。通孔141能够满足v型杆15的一端相对于连杆14滑动、转动以及升降。
27.在本实施例中,v型杆15穿过通孔141的一端安装有弧形挡块151,弧形挡块151的设置避免v型杆15的一端与通孔141脱离。
28.在本实施例中,停机坪12的中心区域对称的开设有两个用于放置无人机支架的凹槽13,检测组件包括两个压力传感器131,两个压力传感器131分别安装在两个凹槽13内,两个压力传感器131均与控制器电连接。
29.在实际使用中,无人机降落时,无人机底部的两个支架分别置于两个凹槽13 内,此时,两个压力传感器131的压力值大于设定的阈值,控制器控制升降机构 11下降,带动盖板2关闭,实现机巢本体1的自动关闭。
30.在本实施例中,盖板2与机巢本体1铰接,盖板2上安装有弹性按压块21。
31.在实际使用中,盖板2盖设在机巢本体1上时,弹性按压块21与无人机机身的上表面接触,便于固定无人机,防止无人机在机巢本体1内发生晃动。弹性按压块21采用橡胶材料。
32.在本实施例中,v型杆15的夹角小于90度,使v型杆15的一端下降到最低点时,盖板2能够盖设在机巢本体1上。
33.在本实施例中,停机坪12上安装有充电器121,充电器121通过连接线与机巢本体1上的电源接口17连接,控制器和升降机构11均与电源接口17电连接。
34.在实际使用中,电源接口17连接电源,无人机落在停机坪12上时,可通过充电器121和电源接口17进行充电,电源接口17同时为控制器和升降机构11 供电。
35.机巢本体1的下方设有四个脚轮,四个脚轮分别安装在机巢本体1的四个直角处,四个脚轮的设置便于机巢本体1的移动。
36.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。