1.本实用新型涉及一种治具,特别是涉及一种真空吸取治具。
背景技术:
2.目前常见的电子装置都是由众多零组件组装而成。在零组件的制造过程中,常会需要使用治具来固定、移动零组件,让制程能顺利进行。然而,不同的零组件通常需要使用各自专用的治具来进行加工制程,如此就需要准备多种规格的治具,且加工制程中常需要进行治具的更换,因而影响制程效率及成本。
技术实现要素:
3.本实用新型的目的在于提供一能解决前述问题的真空吸取治具。
4.本实用新型真空吸取治具,包含基座及真空吸嘴。基座内部形成连通真空负压源的气体通道。真空吸嘴包括设置于基座的套管、能沿轴向移动地穿设于套管中且能与气体通道连通的管柱,以及可转动地设置于套管的旋转钩。所述旋转钩具有钩部,管柱的外表面形成供旋转钩的钩部伸入滑移的导引沟槽,导引沟槽具有路径相异的第一路径及第二路径。当管柱相对于套管沿轴向移动,旋转钩的钩部能在第一路径及第二路径的其中一者中滑移并且能卡固于不同部位,让管柱能在至少两个位置暂时定位。
5.在一些实施态样中,套管贯穿形成对准导引沟槽的透孔。旋转钩与所述钩部的相反端枢设于所述套管,而使旋转钩能相对于套管转动,旋转钩的钩部从套管的外侧穿过透孔而伸入导引沟槽中。
6.在一些实施态样中,导引沟槽具有沿轴向延伸的直线段,以及连接直线段的底侧的环状段,环状段具有第一路径及第二路径;透孔的横向宽度不小于环状段的横向宽度。
7.在一些实施态样中,导引沟槽具有沿轴向延伸的直线段,以及连接直线段的底侧的环状段,环状段具有第一路径及第二路径;旋转钩的钩部能卡固在直线段及环状段的其中一者。
8.在一些实施态样中,直线段的底侧、第一路径的顶侧及第二路径的顶侧相连接,第一路径的底侧及第二路径的底侧相连接。
9.在一些实施态样中,真空吸嘴还包括设置于套管中且撑抵于管柱的弹性部件,弹性部件提供驱动管柱沿轴向远离套管的弹性力,并能使旋转钩的钩部从环状段的底侧往直线段滑移。
10.在一些实施态样中,管柱在环状段的位置形成界定第一路径及第二路径的凸块结构,凸块结构的顶侧形成对准直线段的底侧的导引斜面,旋转钩的钩部从直线段滑入环状段時会顺着导引斜面进入第一路径。
11.在一些实施态样中,第一路径的底侧及第二路径的底侧相连接,且第一路径的底侧的槽壁面凸出形成限制旋转钩的钩部不能沿着槽壁面滑移至第二路径的挡止部;凸块结构的底侧凹陷形成对准挡止部且能用于卡固旋转钩的钩部的定位凹部。
12.在一些实施态样中,第二路径的底侧的槽壁面形成对准定位凹部的最凹陷处的复位斜面,复位斜面能导引旋转钩的钩部往远离第一路径的方向滑移。
13.在一些实施态样中,管柱的顶侧贯穿形成通气孔,当旋转钩的钩部卡固于凸块结构的定位凹部,通气孔未连通基座的气体通道。
14.在一些实施态样中,套管贯穿形成径向延伸的销孔,管柱形成沿轴向延伸且在径向贯通的滑槽,真空吸嘴还包括插设于销孔及滑槽中并能在滑槽中沿轴向滑移的滑动销。
15.本实用新型的有益效果在于:借由真空吸嘴在至少两个位置切换,能够让真空吸取治具运用于不同物件的吸取固定,以便于进行加工制程,而且真空吸嘴的位置切换快速便捷,能借由旋转钩与导引沟槽的配置实现管柱的暂时定位效果,利于减少整体加工时间。
附图说明
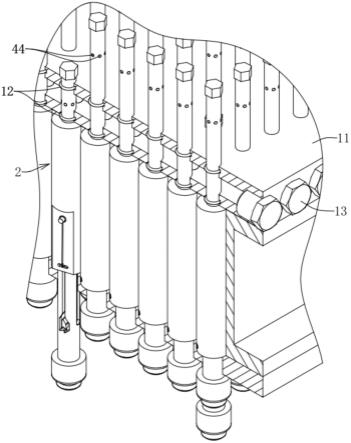
16.图1是一立体图,说明本实用新型真空吸取治具的一实施例配合一压顶部件使用的实施方式;
17.图2是对应于图1但视角不同的立体图;
18.图3是沿图1的iii-iii线的部分剖视图;
19.图4是类似于图3但省略真空吸嘴的部分剖视图;
20.图5是一立体图,说明真空吸取治具的真空吸嘴的实施方式;
21.图6是真空吸嘴的部分分解立体图;
22.图7及图8是真空吸嘴的不完整的正视图。
具体实施方式
23.下面结合附图及实施例对本实用新型进行详细说明。在此要说明的是,在后续说明内容中,「上」、「下」、「顶侧」、「底侧」等用语只是配合附图的方位说明,用于表明结构的相对位置关系,并非在实际使用时对于空间方位的限制。
24.参阅图1至图4,为本实用新型真空吸取治具100的一实施例。真空吸取治具100包含一基座1及多个穿设于基座1的真空吸嘴2,并能与一或多个真空管路200连接而连通于真空气泵等真空负压源,并能搭配一连接部件300而连接于一机械手臂(图中未绘制),以吸取、固持各种不同的物件来进行加工制程。在使用时,真空吸取治具100能配合如图1、图2所示的压顶部件400来逐一对各个真空吸嘴2进行型态的切换,此外也能借由不同型态的压顶部件400来同时对多个真空吸嘴2进行型态的切换,具体使用方式可视需要而定。
25.基座1包括一主体11、多个气密环12及多个塞盖13。主体11内部形成多个吸嘴贯孔111及多个气体通道112。吸嘴贯孔111连通于气体通道112并与气体通道112交错,在图中是以上下延伸(也就是沿真空吸嘴2的轴向延伸)且阵列并排的形态示例。每个吸嘴贯孔111具有大孔径段113及多个分别沿轴向连通大孔径段113的小孔径段114,以供真空吸嘴2可沿轴向活动地穿设于内。气体通道112借由真空管路200连通于真空负压源,其形态可以是交错连接为类似棋盘格的样貌,例如在图4中气体通道112是与各个塞盖13位于相同横向平面上,并且以图4中的左上-右下、左下-右上的延伸方向相互间隔地交错连接为棋盘格状,而连通于各个吸嘴贯孔111的小孔径段114。气体通道112的其中一部分在基座1的主体11表面形成开口而与真空管路200连接,未使用的开口则借由塞盖13封闭。气密环12例如为o形环,
其分别套设于各个真空吸嘴2的外表面并且嵌设于气体通道112与吸嘴贯孔111的连接处的壁面,以确保气密性的维持。
26.参阅图3、图5至图8,真空吸嘴2穿设于基座1的吸嘴贯孔111中,且能与气体通道112连通而产生真空吸力。真空吸嘴2能在基座1沿轴向活动,而能以如图7、图8所示的至少两个位置暂时定位。每个真空吸嘴2包括一套管3、一管柱4、一旋转钩5、一弹性部件6、一滑动销7及一吸头8。
27.套管3固定于基座1的吸嘴贯孔111的大孔径段113中,且具有一轴向延伸的管内穿槽31、一形成于外表面且径向延伸的轴柱32、一贯穿形成于邻近轴柱32处且连通管内穿槽31的透孔33,以及一径向贯通延伸且连通管内穿槽31的销孔34。管内穿槽31供管柱4可轴向活动地穿设于内,并可容纳弹性部件6。轴柱32供旋转钩5的轴孔51穿套于其上,让旋转钩5能以轴柱32为轴心相对于套管3转动。透孔33可让旋转钩5的与轴孔51位于相反端的钩部52穿入,以用于管柱4的暂时定位功用。销孔34供滑动销7穿入,以增进管柱4相对于套管3轴向移动时的稳定性。要说明的是,本实施例虽然是借由轴柱32、轴孔51的结构配置实现让旋转钩5能够相对于套管3转动的效果,但在具体实施时并不以此种结构配置为限,只要能让旋转钩5与钩部52的相反端(也就是设置轴孔51的一端)枢设于套管3上就好。
28.管柱4能沿轴向移动地穿设于所述套管3中且能与所述气体通道112连通,并具有一形成于外表面以供旋转钩5的钩部52伸入滑移的导引沟槽41、一形成于导引沟槽41处的凸块结构42、一沿轴向延伸且在径向贯通的滑槽43,以及多个形成于顶部的通气孔44。
29.导引沟槽41具有一沿轴向延伸的直线段411,以及一连接直线段411的底侧的环状段412。环状段412具有路径相异的一第一路径413及一第二路径414,第一路径413在图7、图8中位于环状段412的右半部,第二路径414则位于环状段412的左半部,两者配合界定出环状段412的路径。本实施例中,直线段411的底侧、第一路径413的顶侧及第二路径414的顶侧相连接(图7中符号a所指处),第一路径413的底侧及第二路径414的底侧相连接(图7中符号b所指处),因此环状段412是跟直线段411的底侧相连,并在直线段411的底侧形成一封闭环状路径。除此之外,本实施例中第一路径413的底侧的槽壁面凸出形成一限制所述旋转钩5的钩部52不能沿着槽壁面滑移至所述第二路径414的挡止部415,且所述第二路径414的底侧的槽壁面于邻近挡止部415处形成一复位斜面416,挡止部415及复位斜面416的具体用途在后续内容一并说明。
30.凸块结构42形成于环状段412处,且分隔界定出第一路径413及第二路径414。凸块结构42的顶侧形成对准直线段411的底侧的导引斜面421,让旋转钩5的钩部52从直线段411滑入环状段412时会顺着导引斜面421进入第一路径413。此外,凸块结构42的底侧凹陷形成对准挡止部415、复位斜面416且能用于卡固旋转钩5的钩部52的定位凹部422,所述定位凹部422的最凹陷处是对准复位斜面416。
31.参阅图3、图4、图6~图8,以下说明真空吸取治具100的作动方式。如图7、图8所示,真空吸嘴2的管柱4能够相对于套管3沿轴向移动,并能在不同位置暂时定位。
32.在如图7的位置时管柱4的位置较低,此时管柱4的通气孔44是位于基座1的气体通道112中,因此管柱4可借由真空负压源提供的真空吸力,从软质的吸头8处吸附各种物件。另一方面,在如图8的位置时管柱4的位置较高,此时管柱4的通气孔44是位于基座1的顶侧,因此管柱4未与真空负压源连通而不具真空吸力。由于弹性部件6是设置于套管3中且撑抵
于管柱4,因而能提供驱动管柱4沿轴向向下远离所述套管3的弹性力,并能使所述旋转钩5的钩部52从所述环状段412的底侧往所述直线段411滑移。也就是说,在未固定且未受外力的情况下,管柱4会被弹性部件6的弹性力推动而相对于基座1、套管3向下移动,并最终维持在如图7的状态。
33.因此,若需要配合待吸取的物件的外观形状而将真空吸嘴2从图7的状态变换为图8的状态时,会需要借由机械手臂(图中未绘制)移动真空吸取治具100,让真空吸嘴2的底部对准压顶部件400,并将真空吸取治具100下压,如此一来管柱4便会相对于套管3沿轴向向上移动,移动的期间旋转钩5的钩部52会沿直线段411逐渐下移,待移动至凸块结构42时会顺着导引斜面421而进入第一路径413中,至滑移至挡止部415时就不能继续滑动,此时可将真空吸取治具100上移而使压顶部件400不再施力于真空吸嘴2,如此一来在未受外力的情况下弹性部件6会撑抵管柱4轴向向下移动,使得钩部52向上移动至定位凹部422中,而让旋转钩5的钩部52卡固于凸块结构42的定位凹部422的最凹陷处,藉以将管柱4暂时定位在图8的位置,此时管柱4的通气孔44未连通所述基座1的气体通道112,真空吸嘴2不具备真空吸力。
34.另一方面,若要将真空吸嘴2从图8的状态变换为图7的状态,可再将真空吸嘴2的底侧压抵于压顶部件400,如此旋转钩5的钩部52就会向下移动至复位斜面416处,由复位斜面416导引旋转钩5的钩部52往远离所述第一路径413的方向滑移,随后可将真空吸取治具100上移,使真空吸嘴2未受外力压抵,此时弹性部件6的弹性力会推动管柱4轴向向下移动,相应的钩部52会顺着第二路径414向上移动,随后进入直线段411中,直到钩部52卡固于直线段411的顶侧为止,就完成管柱4在另一个位置的暂时定位,此时管柱4的通气孔44位于基座1中并且连通于气体管路因而能产生真空吸力,并且真空吸嘴2的底侧会较为突出。
35.在上述实施方式中,旋转钩5的钩部52是从套管3的外侧穿过透孔33而伸入导引沟槽41中,如此的结构配置较容易进行旋转钩5的组装作业,且旋转钩5的钩部52能在第一路径413及第二路径414的其中一者中滑移并且能卡固于不同部位(直线段411或环状段412),让所述管柱4能在至少两个位置暂时定位。并且,由于透孔33的横向宽度不小于环状段412的横向宽度,因此可确保旋转钩5的左右转动幅度可符合钩部52在导引沟槽41(特别是环状段412)中滑移所需。另一方面,插设于销孔34及滑槽43中的滑动销7在管柱4移动时会在滑槽43中沿轴向滑移,如此能限制管柱4不能相对于套管3转动,因此能将钩部52维持在导引沟槽41的区域中,藉以确保管柱4的暂时定位机制能顺利运行。
36.综合上述說明,本实用新型真空吸取治具100借由真空吸嘴2在至少两个位置切换,能够让真空吸取治具100运用于不同物件的吸取固定,以便于进行加工制程。而且,真空吸嘴2的位置切换快速便捷,并能借由旋转钩5与导引沟槽41的配置实现管柱4的暂时定位效果,有利于减少整体加工时间,确实能达成本实用新型的目的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
