1.本实用新型属于车载全景影像技术领域,尤其涉及车载全景影像雷达提醒一体机。
背景技术:
2.现有的车载全景影像雷达提醒一体机,通常包括雷达、ecu、扬声器、摄像头、显示屏,雷达探测的车辆与障碍物距离信号、摄像头拍摄的影像信号传送到ecu,雷达探测的车辆与障碍物距离低于设定阈值时,驱动扬声器报警,驱动显示屏将摄像头拍摄的影像信号实时显示,并可根据影像信号测出的车辆与障碍物距离,驱动扬声器报警,阈值的高低影响提醒的可靠性,低于设定阈值时,若阈值设置过大,提醒过晚,会来不及刹车造成安全事故,若阈值设置过小,提醒过早,不必要的提醒刹车。
技术实现要素:
3.针对上述情况,为克服现有技术之缺陷,本实用新型提供车载全景影像雷达提醒一体机,有效的解决了现有技术阈值设置不当,提醒的可靠性差的问题。
4.其技术方案是,包括提醒补偿电路,所述提醒补偿电路采用油门踏板位置传感器检测油门踩下深度信号,经采样保持后,进入迟滞比较器比较,稳定时,油门踩下深度信号进入乘法器d2,采用速度传感器检测汽车行驶速度信号,经单向导电、滤波后进入除法器d3,除法器d3还接入稳定时的油门踩下深度信号,计算出油门踩下深度信号和车行驶速度信号的比例值,比例值进入乘法器d2,乘法器d2计算出预测速度信号,预测速度信号加到一体机,作为车辆与障碍物距离提醒的依据。
5.本实用新型的有益效果:采用油门踏板位置传感器检测油门踩下深度信号,经保持电路采样保持后,采样前后信号进入迟滞比较器比较,信号稳定时,迟滞比较器输出高电平,三极管q1导通,油门踩下深度信号进入乘法器d2,采用速度传感器检测汽车行驶速度信号,经单向导电、滤波后进入除法器d3,除法器d3还接入采样保持后的油门踩下深度信号,计算出油门踩下深度信号和车行驶速度信号的比例值,比例值进入乘法器d2,乘法器d2计算出采样保持前油门踩下深度信号对应的预测速度信号,预测速度信号加到一体机的ecu,由ecu对距离报警阈值除以预测速度信号,得出到达障碍物的时间再减去车辆停止反应时间,再触发进行提醒,能起到提醒可靠的效果。
附图说明
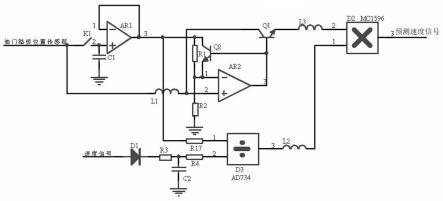
6.图1是本实用新型电路原理图。
具体实施方式
7.以下将结合附图对本实用新型各实施例的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。
8.以下结合说明书附图1,对本实用新型的具体实施方式做进一步详细说明。
9.车载全景影像雷达提醒一体机,包括提醒补偿电路,所述提醒补偿电路采用油门踏板位置传感器检测油门踩下深度信号,经保持电路采样保持后,采样前后信号进入迟滞比较器比较,信号稳定时,迟滞比较器输出高电平,三极管q1导通,油门踩下深度信号进入乘法器d2,采用速度传感器检测汽车行驶速度信号,经二极管d1单向导电、电阻r3和电容c2滤波后进入除法器d3,除法器d3还接入采样保持后的油门踩下深度信号,计算出油门踩下深度信号和车行驶速度信号的比例值,比例值进入乘法器d2,乘法器d2计算出采样保持前油门踩下深度信号对应的预测速度信号,预测速度信号加到一体机的ecu,由ecu对距离报警阈值除以预测速度信号,得出到达障碍物的时间再减去车辆停止反应时间,再触发进行提醒,以此根据采样后实际油门踏下深度对应的车速,得出采样前实际油门踏下深度预测速度信号,再根据预测速度信号触发进行提醒,解决油门踏下,再检测车速,会滞后的问题,能起到提醒可靠的效果。
10.在上述技术方案中,所述提醒补偿电路采用油门踏板位置传感器检测油门踩下深度信号,经开关k1、电容c1、运算放大器ar1组成的保持电路采样保持后,采样前后信号进入运算放大器ar2、电阻r1、电阻r2、三极管q1和q2组成的迟滞比较器比较,信号稳定时,迟滞比较器输出高电平,三极管q1导通,油门踩下深度信号进入乘法器d2,采用速度传感器检测汽车行驶速度信号,经二极管d1单向导电、电阻r3和电容c2滤波后进入除法器d3,除法器d3还接入采样保持后的油门踩下深度信号,计算出油门踩下深度信号和车行驶速度信号的比例值,比例值进入乘法器d2,乘法器d2计算出采样保持前油门踩下深度信号对应的预测速度信号,预测速度信号加到一体机的ecu,由ecu对距离报警阈值除以预测速度信号,得出到达障碍物的时间再减去车辆停止反应时间,再触发进行提醒,以此根据采样后实际油门踏下深度对应的车速,得出采样前实际油门踏下深度预测速度信号,再根据预测速度信号触发进行提醒,解决油门踏下,再检测车速,会滞后的问题,能起到提醒可靠的效果,包括开关k1、电感l1、二极管d1,开关k1的左端、电感l1的左端连接油门踏板位置传感器输出的油门踩下深度信号,开关k1的右端分别连接接地电容c1的一端、运算放大器ar1的同相输入端,运算放大器ar1的反相输入端和输出端分别连接三极管q2的集电极、电阻r1的一端、电阻r5的一端,三极管q2的发射极分别连接电阻r1的另一端、接地电阻r2的一端、运算放大器ar2的反相输入端,运算放大器ar2的同相输入端分别连接电感l1的右端、三极管q1的集电极,运算放大器ar2的输出端分别连接三极管q2的基极、三极管q1的基极,三极管q1的发射极分别连接电感l3的左端、电阻r5的一端,电感l3的右端连接乘法器d2的引脚2,电阻r5的另一端连接除法器d3的引脚1,除法器d3的引脚2连接电阻r4的一端,电阻r4的另一端分别连接电阻r3的一端、接地电容c2的一端,电阻r3的另一端连接二极管d1的负极,二极管d1的正极连接速度传感器检测汽车行驶速度信号,除法器d3的引脚3连接电感l2的一端,电感l2的另一端连接乘法器d2的引脚1,乘法器d2的引脚3输出预测速度信号,预测速度信号加到一体机。
技术特征:
1.车载全景影像雷达提醒一体机,包括提醒补偿电路,其特征在于,所述提醒补偿电路采用油门踏板位置传感器检测油门踩下深度信号,经采样保持后,进入迟滞比较器比较,稳定时,油门踩下深度信号进入乘法器d2,采用速度传感器检测汽车行驶速度信号,经单向导电、滤波后进入除法器d3,除法器d3还接入稳定时的油门踩下深度信号,计算出油门踩下深度信号和车行驶速度信号的比例值,比例值进入乘法器d2,乘法器d2计算出预测速度信号,预测速度信号加到一体机,作为车辆与障碍物距离提醒的依据。2.根据权利要求1所述的车载全景影像雷达提醒一体机,其特征在于,所述提醒补偿电路包括开关k1、电感l1、二极管d1,开关k1的左端、电感l1的左端连接油门踏板位置传感器输出的油门踩下深度信号,开关k1的右端分别连接接地电容c1的一端、运算放大器ar1的同相输入端,运算放大器ar1的反相输入端和输出端分别连接三极管q2的集电极、电阻r1的一端、电阻r5的一端,三极管q2的发射极分别连接电阻r1的另一端、接地电阻r2的一端、运算放大器ar2的反相输入端,运算放大器ar2的同相输入端分别连接电感l1的右端、三极管q1的集电极,运算放大器ar2的输出端分别连接三极管q2的基极、三极管q1的基极,三极管q1的发射极分别连接电感l3的左端、电阻r5的一端,电感l3的右端连接乘法器d2的引脚2,电阻r5的另一端连接除法器d3的引脚1,除法器d3的引脚2连接电阻r4的一端,电阻r4的另一端分别连接电阻r3的一端、接地电容c2的一端,电阻r3的另一端连接二极管d1的负极,二极管d1的正极连接速度传感器检测汽车行驶速度信号,除法器d3的引脚3连接电感l2的一端,电感l2的另一端连接乘法器d2的引脚1,乘法器d2的引脚3输出预测速度信号,预测速度信号加到一体机。
技术总结
本实用新型车载全景影像雷达提醒一体机,提醒补偿电路采用油门踏板位置传感器检测油门踩下深度信号,经采样保持,采样前后信号进入迟滞比较器比较,信号稳定时,输出高电平,三极管Q1导通,油门踩下深度信号进入乘法器D2,采用速度传感器检测汽车行驶速度信号,经单向导电、滤波后进入除法器D3,除法器D3还接入采样保持后的油门踩下深度信号,计算出油门踩下深度信号和车行驶速度信号的比例值,比例值进入乘法器D2,乘法器D2计算出采样保持前油门踩下深度信号对应的预测速度信号,预测速度信号加到一体机的ECU,由ECU对距离报警阈值除以预测速度信号,得出到达障碍物的时间再减去车辆停止反应时间,再触发进行提醒,能起到提醒可靠的效果。靠的效果。靠的效果。
技术研发人员:贾冬敏 唐旭 杜勇强
受保护的技术使用者:河南欧圣达智能科技有限公司
技术研发日:2022.02.25
技术公布日:2022/6/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
