1.本发明涉及一种用于运行车辆的至少一个环境检测传感器的方法。
背景技术:
2.总的来说,用于运行车辆的环境检测传感器的方法由现有技术已知。
3.de 102018127059.3描述了一种用于检查车辆的至少一个环境检测传感器的方法。在该方法中,车辆在数字地图中被定位并且在数字地图中识别所存储的、预计会被环境检测传感器检测到的在车辆环境中的静止物体的特征。借助环境检测传感器检测车辆的环境。如果环境检测传感器没有检测到预期要检测的特征或者如果环境检测传感器实际检测到的特征与预期要检测的特征有很大偏差,则推断环境检测传感器的劣化(degradation)。
技术实现要素:
4.本发明所基于的任务是提出一种与现有技术相比改进的、用于运行车辆的至少一个环境检测传感器的方法。
5.根据本发明,所述任务通过一种具有权利要求1的特征的、用于运行车辆的至少一个环境检测传感器的方法来解决。
6.本发明的有利实施方式是从属权利要求的技术方案。
7.在根据本发明的用于运行车辆、尤其是道路车辆的至少一个环境检测传感器的方法中,在数字地图中定位所述车辆,在数字地图中以与地理关联的方式存储物体、尤其是静止的物体,并且从一组以与地理关联的方式存储在数字地图中的、当前通过环境检测传感器检测到的这些物体中识别出离环境检测传感器最远的物体并基于环境检测传感器与该物体的距离确定环境检测传感器的当前的传感器有效范围。
8.环境检测传感器例如是激光雷达传感器、雷达传感器、超声波传感器和/或光学传感器。光学传感器尤其是图像检测传感器、尤其是视频传感器,例如摄像机,如立体摄像机或单目相机(mono camera)。激光雷达传感器也可以看作是一种光学传感器。
9.借助根据本发明的方法可至少间接确定环境检测传感器的当前的传感器有效范围。实际传感器有效范围在此可大于、但不小于借助根据本发明的方法确定的当前的传感器有效范围,因为该当前的传感器有效范围与环境检测传感器还能检测到的最远物体的距离相关、尤其是相应于这个距离。如果实际传感器有效范围内没有可以被环境检测传感器检测到的更远的物体,则实际传感器有效范围可能更大。
10.借助该方法例如可确定由于大气影响和由此产生的功能限制而减小的当前的传感器有效范围,尤其是以快速的方式且不需要附加传感器和其它服务。这种大气影响例如包括雨、雾、雪和/或由此产生的路面上的伪影,如潮湿、白霜和/或雪花。由此,例如可启动车辆的至少一个使用该环境检测传感器的车辆系统或多个这种车辆系统的相应的系统响应,从而实现改善的安全性。该方法例如适用于自动化和/或自动驾驶的车辆,所述车辆使用一个或多个这种环境检测传感器来检测车辆的环境,以进行驾驶运行。
11.例如将环境检测传感器到该识别出的离环境检测传感器最远的物体的距离确定为环境检测传感器的当前的传感器有效范围。这尤其适用于圆形或球形或至少圆弓形或球缺形围绕环境检测传感器延伸的检测范围,从而该检测范围的边界、即环境检测传感器的当前的传感器有效范围对于该检测范围内的所有检测方向是相同的。
12.尤其是如果环境检测传感器具有不同形状的检测范围、例如构造为椭圆形或椭球体或至少构造为该椭圆形或椭球体的区段的检测范围,则有利的是假设这个被识别出的离环境检测传感器最远的物体位于该检测范围的边界上,从而可由到该物体的距离(尤其是在结合所确定的该物体相对于环境检测传感器的角位置的情况下)以及由检测范围的已知形状来对于所有角位置、即对于所有检测方向确定环境检测传感器的当前检测范围、尤其是当前检测范围的边界,从而由此可对于检测范围内的所有检测方向确定环境检测传感器的当前的传感器有效范围。在此有利的是,传感器有效范围对于每个角位置、即对于每个检测方向包括有效范围说明。因此,所确定的当前的传感器有效范围相应于/等于从环境检测传感器的当前检测范围的边界到该环境检测传感器的当前距离。确定当前的传感器有效范围的这种方案当然也可用于其它检测范围形状、尤其是也用于圆形或球形或至少圆弓形或球缺形围绕环境检测传感器延伸的检测范围。
13.根据本发明,将与物体分别相关的物体信息存储在数字地图中,相应物体的物体信息至少针对该环境检测传感器针对多个不同的检测条件给出环境检测传感器到物体的相应距离,从该距离起环境检测传感器能检测到物体,从数字地图中调用当前被环境检测传感器检测到的离环境检测传感器最远的物体的物体信息并据此确定检测条件,该检测条件所分配的距离与环境检测传感器的所确定的当前的传感器有效范围最相关,即、尤其是与环境检测传感器的所确定的当前的传感器有效范围的偏差最小。由此,不仅可确定当前的传感器有效范围,而且也可确定该当前的传感器有效范围的原因,尤其是如果当前的传感器有效范围与最佳检测条件下的传感器有效范围相比是受限的。尤其是由此可确定大气影响,其是相应的、尤其是受限的当前的传感器有效范围的原因。据此例如可确定路面的摩擦系数特性(例如基于潮湿、雪和/或冰)变化的概率。由此可随后进行所述至少一个或多个车辆系统的相应的系统响应,例如降低车辆速度和/或增加与在前面行驶的另一交通参与者的安全距离。
14.有利的是,相应物体的物体信息针对多个不同类型的环境检测传感器(如激光雷达传感器、雷达传感器、超声波传感器和/或光学传感器、尤其是图像检测传感器、尤其是摄像机,如立体摄像机和/或单目相机)针对多个不同的检测条件给出环境检测传感器到物体的相应距离,从该距离起相应环境检测传感器类型的环境检测传感器能检测到物体。由此,可对于车辆的不同类型的环境检测传感器执行所描述的处理方法并且因此例如借助车辆的多个环境检测传感器分别确定检测条件。
15.在该方法的一种实施方式中,通过借助所述环境检测传感器和/或借助同类型的环境检测传感器检测相应物体并与相应存在的检测条件、尤其是天气条件尤其是在车辆外部服务器上进行融合和评估来确定相应物体的物体信息,其至少针对该环境检测传感器针对多个不同的检测条件给出环境检测传感器到物体的相应距离,从该距离起环境检测传感器能检测到物体。由此,可借助车辆的环境检测传感器、尤其是多个车辆的同类型的环境检测传感器来学习该信息,从而避免通过其它方式单独创建该信息的额外花费。
16.在该方法的一种实施方式中,将车辆的多个环境检测传感器所确定的检测条件和/或根据多个物体确定的检测条件相互比较。由此,例如可确保确定的传感器有效范围的减小不是基于相应环境检测传感器的硬件劣化,而是实际上基于大气影响,特别是如果通过多个环境检测传感器确定了相同的检测条件。
17.代替上述根据本发明的解决方案和/或一种或多种上述实施方式或附加于此例如可规定,借助构造为光学传感器的环境检测传感器、即例如构造为激光雷达传感器或图像检测传感器的环境检测传感器确定该环境检测传感器的当前的路面检测有效范围并根据例如存储在表格中的路面条件和所分配的路面检测有效范围确定当前的路面条件。因此,这可以是上述用于运行车辆的至少一个环境检测传感器的方法的组成部分或者例如也可作为它的替代方案执行,即在一种用于运行车辆的至少一个环境检测传感器的替代方法中。光学传感器、尤其是图像检测传感器例如是摄像机,如立体摄像机或单目相机、尤其是视频传感器。作为替代方案,如上所述,光学传感器例如也可以是激光雷达传感器。
18.如果路面上有水,即如果路面被水覆盖,则与干燥路面相比,路面检测有效范围会减小,因为路面上的水覆盖例如降低了构造为激光雷达传感器的环境检测传感器的激光雷达信号的反向散射强度。即使使用构造为图像检测传感器的环境检测传感器,在路面上有水,即在路面被水覆盖、尤其是有水膜的情况下,特别是与太阳辐射结合,路面检测有效范围与干燥路面相比会减小,因为路面上的水覆盖特别是与太阳辐射结合时可导致反射,该反射使图像检测传感器、尤其是视频传感器“致盲”。
19.因此可推断出分别存在的路面条件变化的类型。由此,例如也可启动车辆的至少一个车辆系统或多个这种车辆系统的相应的系统响应,从而例如通过使车辆的速度和/或与在前面行驶的另一交通参与者的距离适应于确定的路面条件来实现改善的安全性。
附图说明
20.下面参考附图详细阐述本发明的实施例。附图如下:
21.图1示意性示出车道上的具有至少一个环境检测传感器的车辆。
具体实施方式
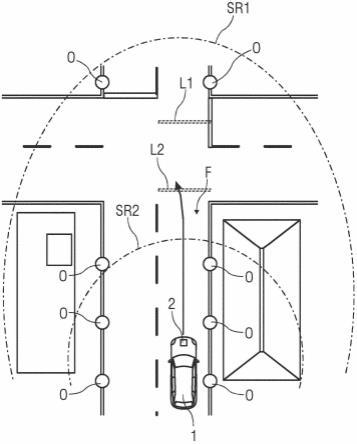
22.图1示意性示出一种示例性状况、尤其是交通状况,其具有在车道f上的车辆1、尤其是道路车辆,该车辆具有至少一个环境检测传感器2。环境检测传感器2例如是激光雷达传感器、雷达传感器、超声波传感器和/或光学传感器、尤其是图像检测传感器,例如摄像机如立体或单目相机、尤其是视频传感器。激光雷达传感器也可以看作是一种光学传感器。有利的是,车辆1具有多种不同类型的环境检测传感器2。
23.借助车辆1的所述至少一个或相应的环境检测传感器2检测车辆1的环境。这例如用于根据车辆1环境中的尤其是静止的物体o确定车辆1的位置和/或运行至少一个车辆系统或多个车辆系统、尤其是在进行车辆1的驾驶运行时辅助车辆驾驶员的车辆系统和/或执行车辆1的自动化、尤其是部分或完全自动化或自动驾驶运行的车辆系统。车辆1因此例如是自动化或自动驾驶车辆1。
24.在下面根据图1更详细描述的用于运行这种环境检测传感器2的方法中,车辆1在数字地图中被定位,尤其是静止的物体o以与地理关联的方式存储在该数字地图中,这些物
体可借助环境检测传感器2检测或应可借助该传感器检测。从一组以与地理关联的方式存储在数字地图中的、当前通过环境检测传感器2检测到的这些物体o中识别出离环境检测传感器2最远的物体o并基于环境检测传感器2与该物体o的距离确定环境检测传感器2的当前的传感器有效范围。
25.例如将环境检测传感器2与该物体o的距离确定为环境检测传感器2的当前的传感器有效范围。这尤其适用于圆形或球形或至少圆弓形或球缺形围绕环境检测传感器2延伸的检测范围,从而该检测范围的边界,即环境检测传感器2的当前的传感器有效范围对于该检测范围内的所有检测方向是相同的。
26.尤其是如果环境检测传感器具有不同形状的检测范围、例如构造为椭圆形或椭球体或至少构造为其区段的检测范围,如图1所示,则有利的是假设这个被识别出的离环境检测传感器2最远的物体o位于该检测范围的边界上,从而可由到该物体o的距离(尤其是在结合所确定的该物体o相对于环境检测传感器2的角位置的情况下)以及由检测范围的已知形状来对于所有角位置、即对于所有检测方向确定环境检测传感器2的当前检测范围、尤其是当前检测范围的边界,从而由此可对于检测范围内的所有检测方向确定环境检测传感器2的当前的传感器有效范围。在此有利的是,传感器有效范围对于每个角位置、即对于每个检测方向包括范围说明。因此,所确定的当前的传感器有效范围相应于从环境检测传感器2的当前检测范围的边界到该环境检测传感器2的当前距离。确定当前的传感器有效范围的这种方案当然也可用于其它检测范围形状、尤其是也用于圆形或球形或至少圆弓形或球缺形围绕环境检测传感器2延伸的检测范围。
27.这种尤其是静止的物体o例如是护栏、建筑物和/或如在此所示的示例中是杆、尤其是导向柱。
28.因此,该方法能够以简单且快速的方式并且尤其是在不需要任何额外的设备成本的情况下至少间接地确定环境检测传感器2和因此尤其是自动化或自动驾驶车辆的至少一种传感器技术的当前的传感器有效范围。环境检测传感器2、尤其是相应环境检测传感器2的传感器技术例如可能由于大气影响而受到功能限制。这借助本文描述的方法来识别,由此可实现例如至少一个车辆系统或多个车辆系统的相应的系统响应。例如在确定的当前的传感器有效范围与最佳检测条件下的传感器有效范围相比减小的情况下,可降低车辆1的速度和/或增加与在前面行驶的另一交通参与者的距离。可导致传感器有效范围减小的大气影响例如是雨、雾、雪和/或由此产生的路面上的伪影,如潮湿、白霜和/或雪花。
29.迄今为止,大气影响例如由远程操作服务、尤其是以天气信息的形式被告知并且因此可被相应地考虑到。但就车辆1的相应非常有限的局部环境中的实际情况而言,这种天气信息具有高度的不确定性。通过在此描述的方法不再需要这种处理方法,因为借助环境检测传感器2本身来确定尤其是由大气影响引起的受限的当前的传感器有效范围。
30.有利的是,借助该方法还推断出可能存在的受限的传感器有效范围的相应存在的大气原因。由此例如可确定路面摩擦系数情况变化的概率,随后例如可相应地调整车辆1的驾驶行为,例如通过降低速度和/或增加与在前面行驶的另一交通参与者的距离,从而提高安全性。
31.为了实现这点,有利的是将与物体o分别相关的物体信息存储在数字地图中,相应物体o的物体信息对于该环境检测传感器2和因此也对于同类型的环境检测传感器2针对多
个不同的检测条件给出环境检测传感器2到物体o的相应距离,从该距离起环境检测传感器2能检测到物体o。然后从数字地图中调用当前被环境检测传感器2检测到的、离环境检测传感器2最远的物体o的物体信息并据此确定检测条件,该检测条件所分配的针对环境检测传感器2的距离与环境检测传感器2的所确定的当前的传感器有效范围最相关。因此,有利地确定这样的检测条件,该检测条件所分配的从环境检测传感器2到物体o、即到当前被环境检测传感器2检测到的离环境检测传感器2最远的物体o的距离最接近确定的当前的传感器有效范围。
32.在根据图1的示例中,在数字地图中以与地理关联的方式存储的物体o例如构造为杆、如导向柱。还示出一个大传感器有效范围sr1,如在良好的、尤其是最佳的大气条件、尤其是天气条件下的最大传感器有效范围,以及一个基于大气影响产生的较小的当前的传感器有效范围sr2。由此可以看出,在良好的、尤其是最佳的大气条件下、尤其是天气条件下,基于由此产生的大传感器有效范围sr1,可借助环境检测传感器2检测到离车辆1很远的物体o、即在此所示的离车辆1最远的物体o。在较小的当前的传感器有效范围sr2下,这些离车辆1很远的物体o,即在此所示的离车辆1最远的物体o不能再被环境检测传感器2检测到,而是只能检测到那些离环境检测传感器2距离较短并且因此位于较小的当前的传感器有效范围sr2内的物体o。如上所述,信息“在相应的检测条件下环境检测传感器2可检测到离车辆1多远的相应物体o”存储在数字地图中,从而能够根据确定的传感器有效范围和当前被环境检测传感器2检测到的离环境检测传感器2最远的物体o推断出相应的检测条件并因此推断出较小的当前的传感器有效范围sr2的相应大气原因。
33.有利的是,相应物体o的物体信息针对或者说对于不同类型的环境检测传感器2(如激光雷达传感器、雷达传感器、超声波传感器和/或光学传感器、尤其是图像检测传感器,例如摄像机,如立体摄像机和/或单目相机、尤其是视频传感器)针对多个不同的检测条件给出环境检测传感器2到物体o的相应距离,从该距离起相应环境检测传感器类型的环境检测传感器2能检测到物体o。也就是说,对于每种类型的环境检测传感器2存储多个不同的检测条件和所分配的到相应物体o的距离,从该距离起可在相应的检测条件下借助相应类型的环境检测传感器2检测到物体o。由此,可对于车辆1的不同类型的环境检测传感器2执行所描述的处理方法并且因此例如可借助车辆1的多个环境检测传感器2来分别确定检测条件。
34.由此,例如可将车辆1的多个环境检测传感器2确定的检测条件、即借助多个环境检测传感器2分别确定的检测条件相互比较。通过这种方式例如可确保确定的传感器有效范围的减小不是基于相应环境检测传感器2的硬件劣化,而是实际上基于大气影响,特别是如果通过多个环境检测传感器2确定了相同的检测条件。替代或附加地,也可根据多个物体o将借助同一环境检测传感器2确定的检测条件相互比较,以排除确定的减小的传感器有效范围是基于环境检测传感器2的硬件劣化。
35.例如通过将这些物体o与分别存在的尤其是天气信息形式的附加检测条件进行融合和评估,可从每个位置或至少从多个位置学习物体o的检测有效范围。有利的是,这在也称为后端的车辆外部服务器上进行。也就是说,通过借助该环境检测传感器2和/或借助同类型的环境检测传感器2检测相应物体o并与相应存在的检测条件、尤其是天气条件尤其是在车辆外部服务器上进行融合和评估来确定相应物体o的物体信息,其针对所述或相应环
境检测传感器2针对多个不同的检测条件给出环境检测传感器2到物体o的相应距离,从该距离起环境检测传感器2能检测到物体o。由此,可借助车辆1的环境检测传感器2、尤其是借助多个车辆1的同类型的环境检测传感器2来学习该信息,从而避免通过其它方式单独创建该信息的额外花费。
36.代替上述处理方法或有利地附加于此,例如可规定,借助构造为光学传感器的环境检测传感器2,即尤其是借助构造为激光雷达传感器的环境检测传感器2或借助构造为图像检测传感器、尤其是视频传感器例如摄像机、如立体摄像机或单目相机的环境检测传感器2确定该环境检测传感器2的当前的路面检测有效范围并根据例如存储在表格中的路面条件和所分配的路面检测有效范围确定当前的路面条件。在环境检测传感器2构造为激光雷达传感器的情况下,当前的路面检测有效范围尤其是通过激光雷达传感器的反向散射信号的相应传播时间来确定。
37.在根据图1所示的示例中,借助构造为激光雷达传感器的环境检测传感器2、例如借助专用的激光雷达系统来检测路面,当路面干燥时,例如可检测到直至图1所示的第一条线l1。由于路面条件的恶化、尤其是由于水覆盖增加,激光雷达传感器信号的反向散射强度降低,因此只能检测到较小的距离内的路面——在图1中通过离车辆1较近的第二条线l2示出。基于路面范围的减小可通过例如存储在表格中的路面条件和所分配的路面检测有效范围推断出路面变化的相应类型。由此,例如也可启动车辆1的至少一个车辆系统或多个这种车辆系统的相应的系统响应,从而例如通过使车辆1的速度和/或与在前面行驶的另一交通参与者的距离适应于确定的路面条件来实现改善的安全性。
38.如已经提到的,代替将环境检测传感器2构造为激光雷达传感器,环境检测传感器2也可构造为其它光学传感器、尤其是图像检测传感器、尤其是视频传感器,例如摄像机,如立体摄像机或单目相机。借助该光学传感器检测路面,当路面干燥时,例如可检测到直至图1中所示的第一条线l1。由于路面条件恶化、尤其是由于水覆盖增加,特别是结合太阳辐射和由此产生的反射——这会使该光学传感器反光,因此只能检测较小的距离内的路面——在图1中通过离车辆1较近的第二条线l2示出。在此也可基于路面范围的减小通过例如存储在表格中的路面条件和所分配的路面检测有效范围推断出路面变化的相应类型。由此,例如也可启动车辆1的至少一个车辆系统或多个这种车辆系统的相应的系统响应,从而例如通过使车辆1的速度和/或与在前面行驶的另一交通参与者的距离适应于确定的路面条件来实现改善的安全性。
39.附图标记列表
[0040]1ꢀꢀꢀꢀ
车辆
[0041]2ꢀꢀꢀꢀ
环境检测传感器
[0042]fꢀꢀꢀꢀ
车道
[0043]
l1
ꢀꢀꢀ
第一条线
[0044]
l2
ꢀꢀꢀ
第二条线
[0045]oꢀꢀꢀꢀ
物体
[0046]
sr1
ꢀꢀ
大传感器有效范围
[0047]
sr2
ꢀꢀ
较小的当前的传感器有效范围
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。