1.本发明涉及一种用于对人的盆骨进行姿态确定的设备,所述设备被设计用于接纳人,所述设备包括至少一个被设计用于承接由人的尾骨或者耻骨施加的坐立压力或者接触压力的第一压力传递元件和至少一个被设计用于承接由人的骶骨施加的接触压力的第二压力传递元件和一个与各压力传递元件连接的评估单元。
背景技术:
2.盆骨视为用于对机能上的脊柱和下肢进行中性定向的位置调节器。尽管盆骨在长度和角度关系方面具有特定于年龄和性别特定的差异,但是仍可以进行对于盆骨的由姿态决定的负荷的普遍有效的、统一的描述。在座椅系统中,通常由座椅系统的座面和靠背支撑人的盆骨。在此,坐骨结节用于承接上身重力并且可以在人处于人体工程学正确的基本上竖直的坐立位置的情况下承接高的坐立压力,而尾骨和骶骨在该坐立位置中基本上保持不受负荷。在水平的仰卧姿态中脊柱支撑上身重力的大部分并且在人的盆骨的区域中的身体区段重量压在骶骨上,其中,由人的重力施加的接触压力在骶骨处在该姿态中为基本上最高而尾骨基本上保持不受负荷。在人体工程学正确的俯卧姿态中,人的耻骨承担身体区段重量的最高份额。
3.然而,人通常在站立、坐立和卧躺中未意识到其自己的个体化的身体姿势并且占据如下位置,这些位置导致在一侧的疼痛的肌肉挛缩,并且长期在脊柱和盆骨结构错误负荷的情况下可能导致磨损过程、即椎间盘突出症。特别长久的坐立通常在错误姿势中并且在没有足够的平衡运动的情况下需要肌肉组织的持久的保持功,由此招致肌肉的平衡不良并且加剧多方面的身体疼痛。通过占据这样的人体工程学错误的位置、特别是错误的坐立位置,尾骨或骶骨可以受人的重力的各部分的负荷,由此可能发生盆骨和脊柱结构的、特别是在盆骨到脊柱中的过渡区域中、骶髂关节的负荷的不平衡。此外,由此可能发生整个脊柱、特别是在腰脊柱的区域中的压缩和挤压,因为人由于通常软的基础结构和降低的肌肉张力而诱使个体化人体工程学正确的坐立位置在较长的时间段上保持在被动的坐姿中,诱使弯曲的身体姿势,该弯曲的身体姿势的原因可在于由姿态决定的盆骨位置。这对于需要护理的人和/或在轮椅中的人是特别不利的,因为这些人由于其身体限制而不能自己改善其错误的坐立位置,而是依靠于第三者、例如疾病护理人员的帮助。因为前面提到的人通常例如由于截瘫或神经变性的疾病而无法觉察疼痛或者无法表达疼痛,所以这特别危害到,通过占据错误的坐立位置而遭受持久的损害。
4.为了避免这点并且抵抗脊柱的可能的错误负荷和与此相联系的身体长期损害的风险,由现有技术已知具有座面的座椅系统,这些座椅系统在尾骨的区域中具有在座面中的凹陷。这些座椅系统虽然为尾骨或尾骨区域减轻负荷,但是仍不能抵抗错误的坐立位置或者对于相应的姿态错误的、特别是围绕水平轴线的盆骨旋转,因为例如不采集能够对盆骨的姿态起作用的脊柱的弯曲改变。由现有技术已知的其他座椅系统、例如现代的汽车座椅使用填充流体的并且可借助于泵装置充填的压力元件连同在腰脊柱的区域中和/或在坐
骨结节的区域中的传感器,以便实现人体工程学正确的坐立位置。
5.这样的汽车座椅在us20170086588a1中公开,所述汽车座椅包括具有两个侧向间隔开距离的并且集成到座位的座面中的气室元件的气室系统,这些气室元件在不平衡的坐立的情况下通过借助于压缩机输送或排出空气而平衡其坐骨结节来定位坐立的人的盆骨。在各气室元件中集成有接触压力传感器,所述接触压力传感器采集坐立压力,使用者的坐骨结节将所述坐立压力施加到座面上。控制器评估坐立压力并且根据评估来控制压缩机。
6.不利的是,在该座椅系统中不准确地采集盆骨的相应的个体化的姿态,而是仅确定由坐骨结节传递到气室元件上的坐立压力。由此该座椅系统局限于通过盆骨围绕矢状轴线旋转来水平地平衡坐骨结节。在错误的、通过人自身占据的坐立位置中,过强充填的气室元件例如可能导致例如脊柱的弯曲改变,这可能由于围绕水平轴线的由姿态决定的错误的盆骨旋转而导致腰脊柱持续不断的过度拉伸。而过弱充填的压力元件可能导致具有因果联系的盆骨后倾的脊柱后凸,这已经随之造成上面已提及的各缺点,特别是在竖直的坐姿中尾骨或骶骨加载人的重力的一部分的负荷。由于由姿态决定的错误的盆骨位置的脊柱的肌肉过度伸长或压缩连同在椎间盘的在一侧的错误负荷无法被上面提到的现有技术的座椅系统所采集,由此也无法阻止身体上的、也在胸椎和颈椎的连接于腰脊柱的区域中的间接损伤。
7.由现有技术(ep 3 011 896 a1、ep 1 093 755 a1)已知其他用于监视人的坐姿的系统,所述系统借助于安装在椅子中的压力传感器或者用于测量人在躺卧中的接触压力的装置。然而,这样的系统或设备不适合于对人的盆骨进行姿态确定。
8.本技术人的更早的、在本专利申请的时间点尚未公开的专利申请a 50386/2019公开了一种用于对人进行身体定位的设备,所述设备具有调整元件和传感器,其设置在坐立元件上和靠背元件上。在该较早的专利申请中,在人从竖直的转变到水平的仰卧位置中期间提到人的滚动过程,其中,通过直线的调整运动通过围绕矢状、水平和纵向轴线旋转来定位人的盆骨。盆骨的姿态仅间接地确定,其方式为只要达到预定的坐立和/或接触压力差就定位人的盆骨。由此可以不准确地确定盆骨的姿态。为了抵抗错误的坐立位置,因此必需的是,精确地并且对于人在座椅或躺椅系统上的任意位置确定人的盆骨的姿态,亦即盆骨围绕人的身体轴线的倾斜和旋转。
技术实现要素:
9.本发明的任务在于,提供一种用于对人的盆骨进行姿态确定的设备,所述设备能集成到已经存在的座椅系统或躺椅系统并且避免现有技术的上面提到的缺点。
10.本发明通过具有权利要求1的特征的用于对人的盆骨进行姿态确定的设备实现所提出的任务。
11.在另一方面中,所述本发明提供一种计算机程序产品,所述计算机程序产品包括指令,所述指令在通过计算单元执行程序时引起所述计算单元执行权利要求1的各步骤。
12.在另一方面中,所述本发明提供一种计算机可读的数据载体,在所述数据载体上存储有计算机程序产品。
13.本发明的有利的实施方式由从属权利要求、说明书和附图得出。
14.本发明提供一种设备,其中,所述评估单元被设计用于执行如下步骤:接收和评估
来自各压力传递元件的测量信号;确定第一特征性压力分布,在所述第一特征性压力分布中,在人的盆骨围绕其水平轴线旋转期间,所述第一压力传递元件首次加载尾骨的坐立压力的至少一部分,或者所述第一压力传递元件加载耻骨的接触压力的至少一部分;并且确定第二特征性压力分布,在所述第二特征性压力分布中,尾骨的施加到第一压力传递元件上的坐立压力具有突然的下降并且骶骨的施加到第二压力传递元件上的接触压力具有突然的上升。
15.通过确定上面提到的特征性压力分布可以准确地确定盆骨关于人的水平轴线的姿态。为此,在座椅或躺椅系统上应确定盆骨的姿态的人根据压力传递元件在座椅系统上的布置结构预定位,在需要护理的人的情况下通过第三人进行。在确定特征性压力分布之后,可以通过现有技术已知的手段和方法接着这样定位人的盆骨,使得对于在座椅系统上特别是围绕人的水平轴线倾斜的任意姿态,可以保持盆骨的由姿态决定的人体工程学正确的位置,以便能够进一步中性地定向脊柱。上面提到的疼痛、如单侧的疼痛的肌肉挛缩或者脊柱上的磨损现象由此可以减缓或者甚至完全避免,因为机能性脊柱的个体化人体工程学正确的定向关于盆骨进行。此外,由此可以使坐立在座椅系统上的人根据其解剖结构符合负荷地定位和支承在座椅系统上,其中,机能性脊柱的该中性定向也可以保持在围绕矢状或纵向轴线的旋转中。
16.通过将本发明集成到已经存在的座椅系统中的或者作为坐立支承器具使用在椅子或床上的可能性,产生大量应用可能性,其中,所述设备不局限于以下示例。所述设备例如可以集成到以下设施中:集成到办公椅、轮椅、车辆座椅、儿童约束系统、训练仪器、处置躺椅、床垫中和/或使用在康复和治疗区域、特别是站立床(stehbett)、站立板(stehbretter)和/或手术床中。本发明在手术床中的集成特别是对于在俯卧姿态中或在仰卧姿态中实施手术是有意义的,因为这些手术通常利用倾斜的手术床实施并且由此可能发生位于手术床上的人的不希望的移位或者说导致盆骨关于脊柱的定向的错位定位,其中,脊柱、特别是在腰区域中强制于压缩或伸长的姿态中。在这样定位盆骨的情况下的手术可能导致大量问题。借助于本发明可以通过采集在第一和第二压力传递元件之间的坐立压力和接触压力改变来识别与盆骨的由姿态决定的中性位置相偏离的位置,并且通过上面提到的手段和方法抵抗该位置。由此可以再次建立并保持盆骨的由姿态决定的中性位置。在大多平坦实施的手术床上实施手术的过程中因此可以以尽可能最佳的身体定位实施手术并且最小化或甚至排除可能的手术风险或者数小时之久的错误定位的部分非常疼痛的结果,特别是通过腰脊柱的与盆骨位置协调的支撑。
17.根据所述用于对人的盆骨进行姿态确定的设备的一种优选的实施形式,所述第一压力传递元件和第二压力传递元件基本上相互间成钝角地设置。由此获得如下优点,即,也可以在改变人的上身的倾斜期间、即在人的盆骨从基本上竖直的坐立位置滚动到基本上水平的仰卧位置中的滚动过程期间确定第一和第二特征性压力分布。
18.根据所述用于对人的盆骨进行姿态确定的设备的一种优选的实施形式,所述计算单元还被设计用于按预定的时间间隔周期性地评估由各压力传递元件传递到评估单元上的测量信号。由此,可以连续地、例如每秒钟地监控盆骨的姿态并且避免通过例如未受训的人员错误地安放需要护理的人。
19.根据所述用于对人的盆骨进行姿态确定的设备的一种优选的实施形式,所述评估
单元是包括膜片并且与各压力传递元件经由通道连接的膜片单元,所述膜片单元具有设置在膜片上的传感器和计算单元,所述计算单元被设计用于评估由传感器输出的传感器信号。由人的盆骨施加到压力传递元件上的坐立压力和接触压力在压力传递元件中引起包含在其中的流体的重新分配。通过膜片单元可以将所述重新分配转换成能由计算单元评估的传感器信号、优选电气的传感器信号。由此包含如下优点,即,所述设备可以迅速地且可靠地响应于盆骨的姿态改变或者与由姿态决定的中性的位置相偏离的位置。
20.根据所述用于对人的盆骨进行姿态确定的设备的另一种实施形式,所述设备包括第三压力传递元件和第四压力传递元件,所述第三压力传递元件和所述第四压力传递元件分别设置在第二压力传递元件旁并且被设计用于承接由人的髂骨嵴施加的接触压力。由此可能的是,在人的盆骨围绕纵向轴线旋转时确定人的盆骨的姿态,这特别是对于在预防褥疮中采集微观和宏观安放位置(mikro-undmakrolagerung)是有利的。在这些安放位置中达到至少区段的身体重心的移动,由此减轻确定的身体分布的负荷。安放位置的已知形式是30度倾斜姿态,所述30度倾斜姿态从基本上水平的仰卧姿态出发普遍借助于两个大的垫子达到并且减少对右边或左边的臀部或者身体半部的负荷。在上面提到类型的座椅或躺椅系统中集成的情况下,所述设备采集在盆腔区域中的身体区段重心的上面提到的移动并且在侧卧姿态中确定盆骨的姿态,并且在人围绕其纵向轴线附加地旋转时、即在人的俯卧状态中确定盆骨的姿态。
21.根据所述用于对人的盆骨进行姿态确定的设备的另一种实施形式,所述设备包括第五压力传递元件和第六压力传递元件,所述第五压力传递元件和第六压力传递元件分别设置在第一压力传递元件旁并且被设计用于承接由人的坐骨结节施加的坐立压力。人的坐骨结节相互间隔开预确定的距离并且定义一个坐骨结节水平面,当人占据了人体工程学正确的坐立位置时,所述坐骨结节水平面水平地围绕矢状轴线平衡。出于多种原因,例如由于长期坐立或者由于身体损伤,两个坐骨结节之一可能更强地受负荷,这导致不平衡的坐骨结节水平面并且长期地有损于盆骨和脊柱结构、特别是这里要提到骶髂关节。通过附加的第五和第六压力传递元件,所述设备可以探测坐骨结节的不对称的坐立压力负荷,并且借助于通过计算单元计算第五和第六压力传递元件的坐立压力的差异,也可以确定盆骨相对于矢状轴线的姿态。以此,所述设备可以确定盆骨关于人的全部三个身体平面的姿态并且因此准确地并且对于人的任意定位(亦即在座椅或躺椅系统上的坐立和仰卧位置)普遍有效地描述人体工程学正确的负荷状态的特征。
22.通过本发明的该实施形式,所述设备除了盆骨相对于人的水平轴线的姿态之外也可以确定盆骨相对于矢状轴线和纵向轴线的姿态。关于盆骨的姿态的信息接着可以被由现有技术已知的座椅系统所利用,以便校正所提到的不对称的坐立压力和接触压力负荷或者实施微观或宏观安放。
23.根据所述用于对人的盆骨进行姿态确定的设备的另一种实施形式,所述设备包括具有多个压力传递元件的阵列,所述阵列被设计用于探测人的盆骨在人处于设备上的任意位置中的坐立压力和接触压力。由此包含下述优点,即,可以省去将人预定位在座椅系统上的上面提到的步骤,因为在该实施形式中除了姿态之外也能确定盆骨在座椅系统上的位置。
24.根据所述用于对人的盆骨进行姿态确定的设备的一种优选的实施形式,所述传感
器从包括机械式、电气式、气动式或液压式传感器的组选择。这样可能的是,由人的盆骨施加的坐立和/或接触压力可以通过多种传感器采集。例如机械的传感器、如应变计亦或加速度传感器可以用于采集坐立和/或接触压力。在使用应变计的情况下,可以取消膜片单元的必要性,其中,由传感器输出的传感器信号由此可以直接地通过评估单元、例如计算机来评估。术语传感器不局限于上面提到的示例。
25.根据所述用于对人的盆骨进行姿态确定的设备的一种优选的实施形式,所述设备包括警报器件,当确定出了第一特征性压力分布和/或第二特征性压力分布时,所述警报器件向人发出警报。所述警报器件从包括视觉式、听觉式或触觉式警报器件的组选择。由此能实现,占据了人体工程学错误的坐立或仰卧位置的人可以注意到其错误的坐立或仰卧位置并且因此培养对其身体姿势的更多的意识。规律地提醒错误的坐立或仰卧位置因此可以帮助预防开头提到类型的身体损伤。在需要护理的人的情况下,使用警报器件具有如下优点,即,可以使护士注意到需要护理的人的人体工程学差的和/或错误的安置,由此可以延长通过护士检查的间隔。
附图说明
26.现在参考附图借助非限制性的实施例更详细地阐述本发明。
27.图1a示出本发明的示意图连同位于可调整的座椅系统上的、处于人体工程学正确的竖直的坐立位置中的人。
28.图1b示出本发明的示意图连同位于可调整的座椅系统上在倾斜姿态中的人,该人的尾骨将坐立压力施加到第一压力元件上。
29.图1c示出本发明的示意图连同位于可调整的座椅系统上在倾斜姿态中的人,该人的骶骨将接触压力施加到第二压力元件上。
30.图1d示出本发明的示意图连同位于可调整的座椅系统上在水平躺卧位置中的人,该人的骶骨将接触压力施加到第二压力元件上。
31.图2示出图表,在该图表中示出在人的盆骨围绕水平轴线旋转期间施加到可调整的座椅系统上的坐立压力和接触压力的压力变化过程以及如下标记,所述标记示出根据本发明的权利要求1的第一特征性压力分布和第二特征性压力分布。
32.图3示出评估单元的一个优选的实施形式。
33.图4示出根据本发明的一种优选的实施形式的座椅系统的透视图,所述座椅系统具有设置在其上的压力传递元件和图3中的评估单元。
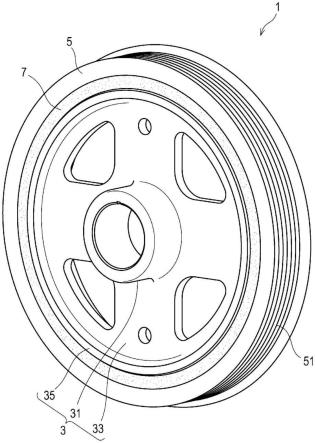
34.图5示出根据本发明的另一种实施形式的座椅系统的透视图,所述座椅系统具有设置在其上的压力传递元件和图3中的评估单元。
35.图6示出根据本发明的另一种实施形式的座椅系统的透视图,所述座椅系统具有设置在其上的压力传递元件和图3中的评估单元。
具体实施方式
36.以下参考图1a至1d,所述附图示出一个人10在可调整的座椅系统40上处于竖直的、倾斜的和水平躺卧的位置中,所述座椅系统包括一个坐立元件41和一个靠背元件42,在所述坐立元件和靠背元件中集成有根据本发明的设备100。在此,设备100也可以集成在未
示出的躺椅系统中或者集成在同样未示出的支承器具中并且不限于在图1a至1d示出的座椅系统40。设备100在此被设计用于承接人10并且包括至少一个被设计用于承接由人10的尾骨51或者耻骨施加的坐立压力或者接触压力的第一压力传递元件21和至少一个被设计用于承接由人的骶骨52施加的接触压力的第二压力传递元件22。如图1b至1d所示,第一压力传递元件21和第二压力传递元件22基本上相互间成钝角地设置。第一压力传递元件21在此居中地设置在坐立元件41的朝向靠背元件42的后三分之一中,并且第二压力传递元件22同样居中地设置在靠背元件42的朝向坐立元件41的下三分之一中。优选地,作为压力传递元件21、22使用填充流体的、非常扁平的腔室,其中,所述腔室优选具有至少部分地匹配于人10的盆骨50的形状。由此可以达到压力传递元件21、22的更高的灵敏性,这允许可以精确地采集坐立压力和接触压力改变。特别是,由此已经可以采集身体重心的轻微移动。
37.术语流体应理解为任意液体或气体,所述液体/气体满足传递坐立压力和接触压力的目的。这样,例如可以将水或空气用作流体。压力传递元件21、22也可以是简单的应变计、例如金属薄膜应变计,所述应变计与坐立压力和接触压力的大小有关地经历可测量的形状或者长度改变。出于改善坐立压力和接触压力采集的原因,所述压力传递元件21、22能见地设置在坐立元件41的上表面上、亦即在坐立元件41的座面上或者在靠背元件42的上表面上,其中,压力传递元件21、22也可以非可见地嵌入到座椅系统40的坐立元件41中和/或靠背42中。
38.图1a至1d示出人10在其围绕水平轴线旋转期间的各个姿态,其中,图1a示出人在座椅系统40上在人体工程学正确的竖直的坐立位置中,并且图1d示出人10在旋转结束之后在人体工程学正确的水平的躺卧位置中。在图1b至1d中的箭头代表在所提到的旋转期间由盆骨50施加的坐立压力和接触压力,其中,f 1示出由坐骨结节施加的坐立压力,f2示出由尾骨施加的坐立压力,而f3示出由骶骨施加的接触压力。
39.如在图1a可看出,在人体工程学正确的竖直的坐立位置中,坐骨结节53承受人10的上身重力的大部分的负荷,其中,较小的重力份额也可以由人的未示出的下肢承接。在该坐立位置中,尾骨51不受负荷并且相对于座椅系统40的坐立元件41的座面具有距离a。
40.在人10旋转了一角度α的情况下,如图1b,距离a减小,亦即由人10的尾骨51至座椅系统41的座面的距离降低,并且在该姿态中基本上为零。由此,尾骨51承担一重力份额并且附加于坐骨结节53将一坐立压力施加到坐立元件41上,所述坐立压力由第一压力传递元件采集。该姿态相当于人10的盆骨50围绕水平轴线倾斜基本上10
°
。
41.从该姿态出发,人10的重力份额在人进一步旋转时这样移动,使得由坐骨结节53施加到坐立元件41上的坐立压力减小或者变为零,而尾骨51和骶骨52承接重力的大部分。该姿态在图1c中示出并且相当于盆骨50围绕人10的水平轴线倾斜基本上45
°
。第一压力传递元件21在此采集尾骨51的坐立压力,而第二压力传递元件22采集人10的骶骨52的接触压力。
42.在人10进一步转变为基本上水平的躺卧位置的情况下,如图1d,重力份额这样移动,使得在该姿态中人10的骶骨52将最高的接触压力施加到第二压力传递元件22上。如通过距离a可看出的,在该姿态中尾骨51不将接触压力施加到第一压力传递元件21上。
43.根据本发明的设备100除了已经提到的压力传递元件21、22具有与压力传递元件21、22优选经由通道连接的评估单元30,其中,所述评估单元30被设计用于接收并评估来自
压力传递元件21、22的测量信号。所述测量信号是物理量例如压力、电流或电压并且与所使用的压力传递元件21、22的类型有关。在上面提到的将填充流体的腔室用作压力传递元件21、22的优选的实施形式中,所述测量信号是压力信号,所述压力信号经由通道传递到评估单元30上。
44.图2示出包括测量序列61、62、63、64的图表60,该图表示出在人10的盆骨50的上面描述的旋转期间施加到座椅系统40上的坐立压力和接触压力的压力变化过程。图表60的纵坐标的刻度归一化地示出,其中,0意味着没有坐立或者接触压力,而1意味着最高的坐立或者接触压力。测量序列61示出由坐骨结节53施加的坐立压力的压力变化过程,其中,测量序列62示出由尾骨51施加的坐立压力的压力变化过程,其中,测量序列63示出由骶骨施加的接触压力的压力变化过程,而测量序列64是压力变化过程由髂骨嵴54施加的接触压力。
45.评估单元30还被设计用于确定第一特征性压力分布65,在所述第一特征性压力分布中,第一压力传递元件21在人10的盆骨50围绕其水平轴线旋转期间首次加载尾骨51的坐立压力的至少一部分,或者第一压力传递元件21加载耻骨的接触压力的至少一部分。人10的尾骨51首次加载坐立压力的至少一部分的第一特征性压力分布65在图2中在盆骨50围绕水平轴线倾斜15
°
的情况下示出。与基础结构、例如座椅系统40的坐立元件41的座面的挠性相关地和/或由于脊柱55在靠背元件42上的支撑和/或尾骨51的病理性改变,尾骨51已经可以在盆骨50围绕水平轴线倾斜基本上10
°
起加载坐立压力。在俯卧姿态中,人10的耻骨(相应于在图2中以测量序列63示出的在仰卧状态中人10的骶骨52的接触压力)将接触压力施加到第一压力传递元件21上。
46.评估单元30还被设计用于确定第二特征性压力分布66,在所述第二特征性压力分布中尾骨51的施加到第一压力传递元件21上的坐立压力具有突然的下降,而骶骨52的施加到第二压力传递元件22上的接触压力具有突然的上升。所述第二特征性压力分布66在图2中示出。
47.通过计算机程序产品实现:评估和接收来自压力传递元件21、22的测量信号以及确定第一特征性压力分布65和第二特征性压力分布66,所述计算机程序包括指令,所述指令在通过评估单元30执行程序时引起所述评估单元执行前面提到的步骤。在此,计算机程序产品存储在计算机可读的数据载体上。
48.优选地,通过确定压力差和由人10的盆骨50、尾骨51和骶骨52施加到压力传递元件21、22上的坐立压力和接触压力来确定特征性压力分布65、66。然而,特征性压力分布65、66也可以通过模式识别确定,其方式为,将坐立压力和接触压力与预定的压力模式相比较。
49.图3示出评估单元30的一种优选的实施形式。然而,评估单元30是包括膜片31和与压力传递元件21、22经由未示出的通道连接的膜片单元37,所述膜片单元优选按预定的时间间隔周期性地评估由压力传递元件21、22传递到评估单元30上的测量信号。这样例如可以每秒钟地评估测量信号,以便能够实施对人10的盆骨50的可靠的姿态识别。膜片31具有直线弹性特性并且将膜片单元37分为两个腔室32、33,其中,第一腔室32具有压力p1,而第二腔室33具有压力p2。各腔室32、33还分别具有一个开口35,在所述开口上设置有通道。膜片单元37还包括设置在膜片31上的传感器34和未示出的计算单元。传感器34优选居中地设置在膜片31上。通过将人10的尾骨51和骶骨52施加到座椅系统40的坐立元件41和靠背元件42上的坐立压力和接触压力引起在压力传递元件21、22中包含的流体的重新分配,由此在
腔室32、33中产生压力差,该压力差导致平的膜片偏离36。设置在膜片31上的传感器34优选是从包括机械式、电气式、气动式或液压式传感器、特别是加速度传感器的组选择的传感器。通过采集速度改变,加速度传感器可以探测膜片偏离36并且将相应的传感器信号传递到计算单元上。计算单元接着评估传感器信号,其中,所述传感器信号优选直接与膜片偏离36相关。如果第一压力传递元件21与膜片单元37的第一腔室32连接,而第二压力传递元件22与第二腔室33连接,在第一特征性压力分布65中压力水平p1》p2。如果人10的骶骨52施加与由尾骨51施加的坐立压力相比更大的接触压力,如这在第二特征性压力分布66中给出,压力水平达到p2》p1。如果尾骨51将与骶骨52施加到第二压力传递元件22上的接触压力相同大的坐立压力施加到第一压力传递元件21上,则p1=p2并且不发生膜片偏离。这同样相当于压力传递元件21、22的无负荷的状态,亦即压力传递元件21、22不加载坐立和/或接触压力。加速度传感器优选集成在未示出的计算单元中。例如,处理器可以设置在膜片31上,所述膜片具有相应的加速度传感器并且评估加速度传感器的传感器信号。
50.图4以透视图示意性地输出本发明的优选的实施形式。膜片单元37优选设置在压力传递元件21、22的区域中并且优选非可见地集成到座椅系统40的靠背元件42中。然而,膜片单元37也能与座椅系统40分开地使用,其中,将膜片单元37与压力传递元件21、22相连接的、在图中未示出的通道的长度在此可以明显地延长。这里示例性设置的传感器34在膜片单元37中的平面的偏离36这里在额状面中沿纵向方向进行。
51.根据本发明的设备100在另一个实施形式中可以包括第三压力传递元件23和第四压力传递元件24,如在图5中示出,所述第三压力传递元件和所述第四压力传递元件分别设置在第二压力传递元件22旁并且被设计用于接纳由人10的髂骨嵴54施加的接触压力。这些附加的压力传递元件23、24基本上具有与第一压力传递元件21和第二压力传递元件22相同的形状并且同样优选实施为填充流体的腔室。通过第三压力传递元件23和第四压力传递元件24,膜片偏离附加于沿纵向方向也可以沿水平方向进行。沿水平方向的膜片偏离在此相当于盆骨50围绕人10的纵向轴线旋转。为此,膜片单元37包括在附图中未示出的第二膜片,所述第二膜片这样设置,使得所述第二膜片将膜片单元37分出两个附加的同样未示出的腔室,亦即分成总共四个腔室。在此,加速度传感器优选设置在第一膜片和第二膜片的交叉点上并且不仅沿纵向方向而且沿水平方向采集平的膜片偏离。
52.在本发明的另一种实施形式中,如在图6中所示,所述设备100包括第五压力传递元件25和第六压力传递元件26,所述第五压力传递元件和所述第六压力传递元件分别设置在第一压力传递元件21旁并且被设计用于接纳由人10的坐骨结节53施加的接触压力。第五压力传递元件25和第六压力传递元件26基本上具有与第一压力传递元件21和第二压力传递元件22相同的形状并且优选同样实施为填充流体的腔室。在该实施形式中,膜片单元37这样构成,使得膜片偏离不仅沿纵向方向而且沿水平方向进行。在坐下期间,膜片由于由坐骨结节53施加到第五压力传递元件25和第六压力传递元件26上的最高的坐立压力(如在图2所示)经历最高的膜片偏离。由此可以确定人10的上身重力。
53.在本发明的该实施形式和前面提到的那些包括四个压力传递元件21、22、23、24的实施形式中,人10的盆骨50的姿态即使在混合运动中也可以探测出。混合运动例如可以是人10同时围绕水平轴线和矢状轴线进行的运动。如果坐骨结节53不对称地受负荷并且同时进行人10的盆骨50围绕其水平轴线的旋转,则例如可以出现所述运动。在此,膜片偏离不仅
沿纵向方向而且沿水平方向进行。通过盆骨50的坐立压力和接触压力引起的、沿矢状方向的膜片偏离通过膜片单元37的上面描述的构造阻止。传感器信号在该平面中的改变能归因于座椅系统40的坐立元件41的姿态改变,其中,由此同样可以归结于靠背元件42的对应的姿态改变。在此,座椅系统40围绕纵向轴线的旋转相当于坐立元件41朝向侧面倾斜,而座椅系统围绕水平轴线的旋转相当于坐立元件41向上或向下倾斜,可以确定座椅系统围绕纵向轴线和水平轴线的旋转。通过力的三角形计算,由此可以通过评估单元30计算合成的最高的坐立和/或接触压力。由此,所述设备可以确定盆骨的坐立和/或接触压力份额,由此即使处于盆骨的轻微的错误位置中也能确定盆骨50的姿态。
54.在本发明的一种附图中未示出的实施形式中,所述设备100包括具有多个压力传递元件的阵列,所述阵列被设计用于探测人10的盆骨50在人10处于设备100上的任意位置中的坐立压力和接触压力。具有多个压力传递元件的阵列可以集成在坐立元件41中、在靠背元件42中或在两者中、即在坐立元件41中并且在靠背元件42中。由此,可以省去将人10预定位在座椅系统40。
55.在附图中未示出的实施形式中,所述设备100包括警报器件,当确定了第一特征性压力分布65和/或第二特征性压力分布66时,所述警报器件向人10发出警报。如果通过评估单元30确定了第一特征性压力分布65和/或第二特征性压力分布66、亦即人体工程学错误的坐立或躺卧位置,这样例如可以向人10警报以扬声器发出的声音形式的听觉信号或者以警报灯发出的警报光形式的视觉信号。警报器件在此可以集成/设置在座椅系统40中/上或者与座椅系统40分开地位于所述座椅系统附近。警报器件在此从包括视觉式、听觉式或触觉式警报器件的组选择。
56.根据前面描述的具有面传感器的实施例,在盆骨围绕水平轴线旋转基本上45
°
时出现对于本发明重要的角度,在所述角度中人施加到坐立元件上的重力份额从尾骨和坐骨结节转变到骶骨上。但该对于本发明重要的角度也取决于相应的人的重量和坐立元件的硬度。与此相应地,该对于本发明重要的角度可以位于如下角度区域中,所述角度区域中在11
°
时(尾骨开始压靠到坐立元件上)开始并且在56
°
时(坐骨结节重新减轻坐立元件的负荷)结束。对于本发明重要的角度因此例如可以为35
°
、40
°
、43
°
、45
°
、47
°
、50
°
、53
°
或56
°
。
57.根据另一种具有特别软的坐立支承器件的实施例中,前述针对面传感器描述的、包括对于本发明重要的至少11
°
的角度的角度范围不构成重要的界限。利用特别软的坐立支承器具实际上已经可以在竖直的坐立位置中、亦即在对于本发明重要的0
°
的角度中测量尾骨的压力,并且在躺卧的位置中、亦即在根据本发明的90
°
的角度中测量坐骨结节的压力,由此对于特别软的坐立支承器具,对于本发明重要的角度的角度范围能设置为0
°
至90
°
。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。