1.本发明涉及水果采摘技术领域,具体涉及一种分布式四轮电驱动及全能转向的智能水果采摘平台。
背景技术:
2.为了解放劳动力、提高采摘效率、促进水果种植业的发展,能够执行水果采摘任务的采摘平台逐步应用于水果种植业。大型采摘平台在自动化程度、作业效率等方面具备独特的优势。然而,大型采摘平台因存在最小转弯半径较大、机动性较差的问题,其在狭窄地形区域及封闭型种植领域内作业困难。具备较强作业灵活性的小型采摘平台在大棚种植、梯田等需要小面积作业、封闭型种植领域内的适应性更强,但小型采摘平台也存在动力性偏弱的问题,尤其在大面积坡地、山地、丘陵等区域内作业存在部分困难。同时,相当部分采摘装置在不同类型水果采摘方面的自适应性略差,采摘效率也有待提升。因此,开发具备较强动力性、机动性、作业灵活性的小型自适应性采摘平台显得尤为必要,进一步广泛适应山地、丘陵等多种地形及狭窄地形区域中的自动化、自适应采摘,并在无损采摘的基础上提高采摘效率。
3.发明人在实现本发明的过程中发现:为了解决所述问题,该领域诞生了众多技术方案,诸如专利申请号为cn201510663818.6公开了一种以内燃机驱动的采摘机,包括车架,固定在车架上为车提供动力的发动机,固定在车架上由发动机提供动力的液压泵,固定在车架上的支撑装置,通过支撑装置连接车架的采摘平台,极大地解放了劳动生产力,提高了采摘效率。然而,该方案仍以内燃机为动力源,在作业过程中存在机械振动、噪音、尾气排放等问题,对作业人员的健康以及环境有着不利的影响。此外,其转弯半径较大,机动性能较差,在狭窄地形区域及封闭型种植领域内作业困难。
4.为了减少环境污染,诸如专利申请号为cn201710463041.8公开了一种电机驱动的水果采摘平台,包括自走机构、升降机构、工作平台、动力系统和控制系统,采用电机驱动,极大地减少了对水果种植环境的污染,但其动力性较差,在山地、丘陵等区域内作业存在明显的困难。
5.为了适应不同形状的水果,在实现无损采摘的基础上提高采摘效率,诸如专利申请号为cn201910271634.3公开了一种水果采摘平台,包括可移动的水果收集装置、采摘机械手和设置于采摘机械手上的剪果柄装置,以负压的方法抓取水果,通过管道输送水果,减轻了劳动强度,提高了工作效率,但以负压的方法抓取水果,能耗较大,而且采用剪果柄装置易对水果造成损伤。
6.在兼顾分布式电驱动、全能转向、全自动控制与移动端配合设置、适应于不同形状水果的需求,在实现无损采摘的基础上提高采摘效率等方面亟需新的技术方法。因此,本发明试图提供一种分布式四轮电驱动及全能转向的智能水果采摘平台。
技术实现要素:
7.本发明的目的在于提供一种分布式四轮电驱动及全能转向的智能水果采摘平台,集成分布式电驱动、全能转向、全自动控制与移动端配合设置三重关键优势,能够适应山地、丘陵等多种地形及狭窄地形区域内水果采摘任务,在不同水果类型采摘方面具有较强的适应性,能够在无损采摘的基础上提高采摘效率。
8.为了实现所述目的,本发明提供如下技术方案:一种分布式四轮电驱动及全能转向的智能水果采摘平台,包括采摘平台本体和安装在采摘平台本体上的采摘装置及控制装置,其中:所述采摘平台本体包括车架、盛箱体、动力装置、及四组配套设置的转向装置、减振装置和驱动装置,盛箱体固定在车架中部,动力装置安装在车架前端,转向装置安装在车架四个角上,转向装置通过设在车架下方的减振装置连接驱动装置;所述采摘装置设于车架后端,包括可升降并旋转的机械臂、可旋转并开合的机械手、摄像头,机械臂可转动安装在车架上,机械臂与机械手相连接,摄像头设在机械臂的前端;所述采摘装置、转向装置、驱动装置、摄像头通过控制装置与动力装置电性连接,并通过控制装置实现遥控操作;所述控制装置包括全自动控制装置、电控单元、遥控接收装置和移动端,电控单元与遥控接收装置相连接,移动端上设有前进按钮、采摘按钮、左转按钮、右转按钮、后退按钮,遥控接收装置与移动端无线连接,全自动控制装置与移动端配合设置,移动端控制为全自动控制装置提供应急辅助。
9.进一步地,所述采摘装置的机械臂包括底座电机、旋转底座、后臂、后臂电机、中臂、中臂电机、前臂和前臂电机;机械手包括动力机构和夹持机构,动力机构包括底板、内侧带支柱板槽的支柱、手臂电机、环形板、手臂电机支架、外周均布四个支柱架槽的支柱架、螺旋轴、活动架和插销,夹持机构设有四组,每组夹持机构包括底座、连杆、凹型连杆和手爪;所述底座电机固定在车架后端, 底座电机上嵌套有所述旋转底座,后臂固定在旋转底座上、后臂前端安装有所述后臂电机,中臂嵌套于后臂电机上、其前端安装有所述中臂电机,前臂嵌套于中臂电机上、其前端安装有所述前臂电机,摄像头安装在前臂前端的一侧;所述机械手通过底板安装于前臂电机上,所述支柱设有四个、均布于底板同一圆周的垂直方向上,支柱上端插装于设于支柱架底部向下凸起的插槽中,手臂电机支架为通过多个支柱连接的上下两个环形板结构、中间是手臂电机安装腔,手臂电机支架设于四个支柱围合的中间空腔中、通过环形板外沿嵌套于支柱板槽内,手臂电机固定在手臂电机支架中间、连接有向远离底板一侧延伸并从支柱架中间孔穿出的所述螺旋轴,活动架螺纹连接于螺旋轴上,活动架的外周均布有四个铰接座、所述夹持机构的凹型连杆一端通过插销连接于对应的铰接座上,凹型连杆的另一端通过插销铰接于连杆中部,每组夹持机构的连杆为内外两个,凹型连杆铰接于内侧的连杆上,连杆上端通过插销与手爪铰接,连杆下端通过插销与底座铰接,底座嵌套卡接于支柱架的支柱架槽内。该采摘装置结构简单,能够适应于不同形状水果的需求,并在实现无损采摘的基础上提高采摘效率。
10.进一步地,所述转向装置包括转向电机、转向输出轴、转向支架和转向轴承,转向电机固定在车架表面、转向输出轴穿过车架向下延伸设置,转向输出轴下端与转向支架相
211)、支柱(1-212)、手臂电机(1-213)、支柱板槽(1-214)、环形板(1-215)、手臂电机支架(1-216)、插槽(1-217)、支柱架槽(1-218)、支柱架(1-219)、螺旋轴(1-2110)、铰接座(1-2111)、活动架(1-2112)、插销(1-2113)、夹持机构(1-22)、底座(1-221)、连杆(1-222)、连杆上端(1-222a)、连杆下端(1-222b)、凹型连杆(1-223)、手爪(1-224)、控制装置(2)、全自动控制装置(2-1)、电控单元(2-2)、遥控接收装置(2-3)、移动端(2-4)、前进按钮(2-41)、采摘按钮(2-42)、左转按钮(2-43)、右转按钮(2-44)、后退按钮(2-45)、车架(3)、转向装置(4)、转向电机(4-1)、转向输出轴(4-2)、转向支架(4-3)、转向轴承(4-4)、孔腔(4-5)、减振装置(5)、减振器(5-1)、减振器上端(5-1a)、减振器下端(5-1b)、弹簧(5-2)、驱动装置(6)、驱动车轮(6-1)、驱动车轮轴(6-2)、轮毂电机(6-3)、挡泥板(6-4)、动力装置(7)、蓄电池(7-1)、动力箱(7-2)、蓄电池充电接口(7-3)。
具体实施方式
26.下面将结合附图对本发明的技术方案进行清楚、完整地描述,但该实施例不应理解为对本发明的限制。
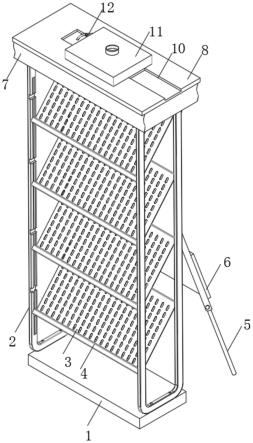
27.本发明如图1至图10所示:如图1、10所示:一种分布式四轮电驱动及全能转向的智能水果采摘平台,包括采摘平台本体a和安装在采摘平台本体上的采摘装置1及控制装置2,其中:所述采摘平台本体a包括车架3、盛箱体d、动力装置7、及四组配套设置的转向装置4、减振装置5和驱动装置6,盛箱体d固定在车架3中部,动力装置7安装在车架前端,转向装置4安装在车架四个角上,转向装置通过设在车架下方的减振装置5连接驱动装置6;所述采摘装置1设于车架3后端,包括可升降并旋转的机械臂1-1、可旋转并开合的机械手1-2、摄像头c,机械臂可转动安装在车架上,机械臂与机械手相连接,摄像头设在机械臂的前端;所述采摘装置1、转向装置4、驱动装置6、摄像头c通过控制装置2与动力装置7电性连接,并通过控制装置实现遥控操作;所述控制装置2包括全自动控制装置2-1、电控单元2-2、遥控接收装置2-3、移动端2-4,电控单元2-2与遥控接收装置2-3相连接,移动端2-4上设有前进按钮2-41、采摘按钮2-42、左转按钮2-43、右转按钮2-44、后退按钮2-45,遥控接收装置2-3与移动端2-4无线连接,全自动控制装置2-1与移动端2-4配合设置,移动端控制为全自动控制装置提供应急辅助。
28.如图1、图2、图3、图4、图5所示:所述采摘装置1安装在车架3后端,包括机械臂1-1、机械手1-2、摄像头c,机械臂1-1包括底座电机1-11、旋转底座1-12、后臂1-13、后臂电机1-14、中臂1-15、中臂电机1-16、前臂1-17和前臂电机1-18;机械手1-2包括动力机构1-21和夹持机构1-22,动力机构包括底板1-211、内侧带支柱板槽1-214的支柱1-212、手臂电机1-213、手臂电机支架1-216、外周均布四个支柱架槽1-218的支柱架1-219、螺旋轴1-2110、活动架1-2112和插销1-2113;夹持机构1-22设有四组,每组夹持机构包括底座1-221、连杆1-222、凹型连杆1-223和手爪1-224;所述底座电机1-11固定在车架3后端, 底座电机上嵌套有所述旋转底座1-12,后臂1-13固定在旋转底座上、后臂前端安装有所述后臂电机1-14,中臂1-15嵌套于后臂电机上、其前端安装有所述中臂电机1-16,前臂1-17嵌套于中臂电机上、其前端安装有所述前臂
电机1-18,摄像头c安装在前臂前端的一侧;所述机械手1-2通过底板1-211安装于前臂电机上,所述支柱1-212设有四个、均布于底板同一圆周的垂直方向上,支柱上端插装于设于支柱架1-219底部向下凸起的插槽1-217中,手臂电机支架1-216为通过多个支柱连接的上下两个环形板1-215结构、中间是手臂电机1-213安装腔,手臂电机支架设于四个支柱围合的中间空腔中、通过环形板外沿嵌套于支柱板槽1-214内,手臂电机固定在手臂电机支架中间、连接有向远离底板一侧延伸并从支柱架中间孔穿出的所述螺旋轴1-2110,活动架1-2112螺纹连接于螺旋轴上,活动架的外周均布有四个铰接座1-2111、所述夹持机构的凹型连杆1-223一端通过插销1-2113连接于对应的铰接座上,凹型连杆的另一端通过插销铰接于连杆1-222中部,每组夹持机构的连杆为内外两个,凹型连杆铰接于内侧的连杆上,连杆上端1-222a通过插销与手爪1-224铰接,连杆下端1-222b通过插销与底座1-221铰接,底座嵌套卡接于支柱架的支柱架槽1-218内,夹持机构1-22通过螺旋轴1-218的转动来实现收缩。
29.如图6、图7所示:所述转向装置4包括转向电机4-1、转向输出轴4-2、转向支架4-3和转向轴承4-4,转向电机4-1固定在车架3表面、转向输出轴4-2穿过车架向下延伸设置,转向输出轴下端与转向支架4-3相连接,转向轴承4-4套装在转向支架上,车架上设有用于镶套转向轴承的孔腔4-5。
30.如图8所示:所述转向装置4包括两个减振器5-1及套设在减振器上的弹簧5-2,两个减振器上端5-1a分别嵌套在转向装置的转向支架4-3两侧,减振器下端5-1b连接驱动装置6。
31.如图9所示:所述驱动装置6包括驱动车轮6-1、驱动车轮轴6-2、轮毂电机6-3、挡泥板6-4,轮毂电机6-3嵌套于驱动车轮6-1中间与驱动车轮轴6-2相连接,驱动车轮轴两端从轮毂电机的中间穿过、分别与减振器下端5-1b相连接,挡泥板6-4设在转向装置4的转向支架4-3底部。
32.如图1所示:所述动力装置7包括蓄电池7-1和动力箱7-2,动力箱一侧设有蓄电池充电接口7-3,动力箱7-2安装在车架3前端,动力箱内安装有所述蓄电池7-1。
33.本发明的工作原理:全自动控制采摘时,摄像头c采集水果b的相关数据、数据传输至电控单元2-2,电控单元根据控制算法决策向驱动装置6、转向装置4、采摘装置1发送相应的控制信号,进而控制安装在驱动车轮轴6-2上的轮毂电机6-3输出动力促使驱动车轮6-1向前、后行驶;需制动时,中断轮毂电机6-3的动力输出,控制轮毂电机反转,以实现驱动车轮的制动;转向时,控制转向电机4-1输出动力带动转向支架4-3旋转,进而经安装在转向支架上的减振器5-1,带动减振器下端5-1b的驱动车轮6-1转向,控制采摘平台本体a至适当的采摘位置;同时,电控单元2-2控制底座电机1-11带动旋转底座1-12上的机械臂1-1及机械手1-2旋转(即在旋转底座上360度旋转),同时控制后臂电机1-14使中臂1-15沿径向旋转、提升(即电机的动力输出轴沿后臂径向设置、旋转一定角度实现升降),控制中臂电机1-16带动前臂1-17、机械手沿径向旋转、提升,使机械手接触水果b,手臂电机1-213控制机械手以适应的张合度抓取水果,进而控制中臂电机带动前臂上的机械手、机械手沿径向旋转、下降,控制后臂电机1-14使中臂1-15沿径向旋转、下降,以拉拽的方式将水果b摘掉;或可通过控制前臂电机1-18沿轴向旋转带动机械手旋转,以旋转力将苹果摘掉,随后控制底座电机
1-11带动旋转底座1-12上的机械臂1-1及机械手轴向旋转,使机械手对准盛箱体d,手臂电机1-213控制机械手的张合度,使水果落入盛箱体内;在全自动控制装置2-1出现故障时,通过移动端2-4控制采摘平台本体a;前进、后退时,作业人员点击移动端上的前进按钮2-41、后退按钮2-45,继而遥控接收装置2-3接收前进、后退信号,前进、后退信号进一步输入电控单元2-2中,进而电控单元根据控制算法决策向驱动装置6的轮毂电机6-3发出正、反转指令,控制安装在驱动车轮轴6-2上的轮毂电机输出动力促使驱动车轮6-1向前、向后行驶;左转、右转时,作业人员点击移动端2-4上的左转按钮2-43、右转按钮2-44,继而遥控接收装置2-3接收左转、右转信号,左转、右转信号进一步输入电控单元2-2中,进而电控单元根据控制算法决策向转向装置4的转向电机4-1发出正、反转指令,控制转向电机输出动力带动转向支架4-3转动,经安装在转向支架上的减振器5-1,带动减振器下端5-1b的驱动车轮6-1左、右转向。
34.本说明书中未作详细说明之处,为本领域公知的技术。
35.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。