1.本公开涉及电动辅助装置以及程序。
背景技术:
2.日本特许第3557006公开了在由人力驱动车轮的轮椅中具备通过马达对车轮进行辅助驱动的电动辅助装置。
技术实现要素:
3.在如日本特许第3557006所记载的结构那样使用电池的电力来通过马达对车轮进行辅助驱动的轮椅中,在外出时,有可能会在充电设备少的环境下将电池的电力用尽。
4.本公开是鉴于上述状况而完成的,目的在于提供一种能够抑制在外出时将电力用尽的电动辅助装置以及程序。
5.本公开涉及的电动辅助装置具备具有硬件的处理器,所述处理器,通过马达的动力对从使用者输入到驱动部件的人力动力进行辅助,使用来自传感器的信号来判定当前位置是否为室外,在判定为当前位置为室外的情况下,与位于室内的情况相比,减小基于所述马达的辅助量。
6.本公开涉及的程序,使具有硬件的处理器执行:通过马达的动力对从使用者输入到驱动部件的人力动力进行辅助,使用来自传感器的信号来判定当前位置是否为室外,在判定为当前位置为室外的情况下,与位于室内的情况相比,减小基于所述马达的辅助量。
7.根据本公开,能够抑制在外出时将用于向电动辅助装置供给的电力用尽。
附图说明
8.下文将参照附图说明本发明示例性实施例的特征、优点以及技术和产业的意义,其中相同的标号表示同样的要素,并且,其中:
9.图1是表示实施方式中的电动辅助装置的概略结构的示意图。
10.图2是表示电动辅助装置的功能块的框图。
11.图3是表示可变辅助控制的处理流程的流程图。
12.图4是表示切换为固定辅助控制时的处理流程的流程图。
13.图5是表示可变辅助控制中所执行的处理流程的流程图。
14.图6是表示可变辅助控制中所执行的其他处理流程的流程图。
具体实施方式
15.以下,参照附图对本公开的实施方式中的电动辅助装置以及程序进行具体的说明。此外,本公开并不限定于以下说明的实施方式。
16.图1是表示实施方式中的电动辅助装置的概略结构的示意图。如图1所示,电动辅助装置1是用于在用户4在室内2、室外3移动时对用户4单独的移动进行辅助的装置。在本实
施方式中,在用户4使用的轮椅5设置有电动辅助装置1。即,作为用户4能够单独进行移动的移动体,构成了带电动辅助装置1的轮椅5。此外,在该说明中,有时将带电动辅助装置1的轮椅5记载为电动辅助轮椅。
17.轮椅5具备被输入用户4的人力动力的手轮圈、和与手轮圈一体地旋转的车轮5a。通过用户4对手轮圈输入人力动力,该人力动力被传递到车轮5a。在该情况下,手轮圈和车轮5a一体旋转。也即是,车轮5a是被输入来自用户4的人力动力的驱动部件。
18.并且,电动辅助装置1将用户4通过人力来驱动车轮5a的轮椅5作为对象,使用电池11的电力驱动马达12(表示于图2)来对车轮5a进行辅助驱动。通过从马达12输出的转矩,对车轮5a的驱动力进行辅助。这样,车轮5a是电动辅助装置1的辅助对象的旋转部件。例如如图1所示构成为:在用户4使用带电动辅助装置1的轮椅5外出到室外3时,使用预先充入到了电池11的电力来得到由马达12实现的辅助动力。对电池11充入有从外部电源供给的电力。作为外部电源,可举出设置在房屋、商用设施等的室内2的插座等。
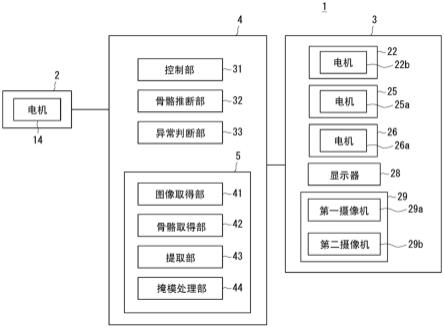
19.图2是表示电动辅助装置的功能块的框图。此外,图2所示的功能块可视为电动辅助轮椅的功能块。
20.如图2所示,电动辅助装置1具备电池11、马达12、驱动部件13、检测部14、控制部15、存储部16以及切换部17。
21.电池11是储存用于向马达12供给的电力的蓄电池。该电池11由锂离子电池等的二次电池构成。例如,电池11经由充电器与室内2的插座连接。并且,将从外部电源供给的电力充入电池11。另外,电池11与马达12电连接。因此,能够将充入到电池11的电力供给至马达12。
22.马达12是利用储存于电池11电力来进行驱动的电动机。从该马达12输出的动力被传递至驱动部件13。在电动辅助轮椅中,马达12和车轮5a配置在同一旋转中心轴线上。并且,马达12的转子和驱动部件13构成为一体旋转。
23.例如,在左右的车轮5a分别设置有一个马达12。也即是,马达12包括对右侧的车轮5a进行辅助驱动的右侧马达(第1马达)和对左侧的车轮5a进行辅助驱动的左侧马达(第2马达)。在该情况下,能够用右侧马达和左侧马达将左右的车轮5a的转速分别控制为不同的大小。由此,能够对轮椅5的方向转换、转弯进行辅助。
24.驱动部件13由车轮5a构成。在来自用户4的人力动力之外,来自马达12的辅助动力也被输入到驱动部件13。例如,驱动部件13是配置在了与马达12的旋转中心相同的轴线上的旋转部件。并且,驱动部件13即使没有来自马达12的辅助动力,也能够仅用来自用户4的人力动力进行驱动。也即是,轮椅5即使不消耗电池11的电力,也能够通过人力动力进行驱动。即,即使将电池11的电力用尽,轮椅5也能够通过人力动力进行驱动。
25.检测部14是对表示轮椅5的外部环境的信息进行检测的传感器。由检测部14检测到的信息被输出到控制部15。该检测部14具有气温检测部141、紫外线检测部142以及位置信息检测部143。
26.气温检测部141是对周边温度进行检测的传感器。在室内2的情况下,通过气温检测部141检测室内温度。在室外3的情况下,通过气温检测部141检测气温。
27.紫外线检测部142是对紫外线进行检测的传感器。无论是在室内2、还是在室外3,紫外线检测部142都对照射到轮椅5的紫外线进行计测。
28.位置信息检测部143是对轮椅5的当前位置进行检测的传感器。例如,位置信息检测部143由使用了gps(global positioning system,全球定位系统)的测位装置构成。
29.控制部15具备处理器和存储器。处理器包括cpu(central processing unit,中央处理单元)、dsp(digital signal processor,数字信号处理器)、fpga(field-programmable gate array,现场可编程门阵列)等。存储器是主存储装置,包括ram(random access memory,随机访问存储器)、rom(read only memory,只读存储器)等。该控制部15将保存于存储部16的程序加载到存储器(主存储装置)的工作区域并进行执行,通过执行程序来对各构成部等进行控制,由此,实现符合了预定目的的功能。
30.存储部16由eprom(erasable programmable rom(可擦除可编程只读存储器))等的记录介质构成。在存储部16中保存有由控制部15执行的各种程序。
31.例如,在存储部16中保存有用于执行对驱动部件13进行辅助驱动的电动辅助控制的程序。即,控制部15在来自用户4的人力动力被输入到驱动部件13时,执行通过马达12对驱动部件13进行辅助驱动的电动辅助控制。在控制部15执行电动辅助控制时,马达控制部152对马达12的转矩和转速进行控制。在电动辅助轮椅中执行电动辅助控制,以使得在驱动部件13中以小的人力动力获得大的驱动力。
32.另外,控制部15基于来自检测部14的输入信号来执行各种控制。例如在控制部15执行电动辅助控制时,判定部151使用来自检测部14的信号,判定轮椅5是否位于室外3。并且,在判定为了轮椅5位于室外3的情况下和判定为了轮椅5位于室内2的情况下,控制部15执行不同的电动辅助控制。不同的电动辅助控制包括将由马达12实现的辅助量固定为预定值的固定辅助控制、和由马达12实现的辅助量自动地进行变更的可变辅助控制。该预定值是预先设定的值,被存储于存储部16。此外,在该说明中,有时将可变辅助控制记载为第1控制、将固定辅助控制记载为第2控制。
33.切换部17由用于对电动辅助控制进行切换的手动开关构成。该切换部17是由用户4操作的操作部。例如,切换部17由对电动辅助的开启(on)和关闭(off)进行切换的开关、对可变辅助控制和固定辅助控制进行切换的开关构成。
34.例如,在通过切换部17而电动辅助被选择为开启、且选择了固定辅助控制的情况下,控制部15执行电动辅助控制中的固定辅助控制。或者,在通过切换部17而电动辅助被选择为开启、且选择了可变辅助控制的情况下,控制部15执行电动辅助控制中的可变辅助控制。也即是,控制部15基于来自切换部17的信号,对可变辅助控制和固定辅助控制进行切换。另外,在通过切换部17而电动辅助被选择为关闭的情况下,控制部15不执行电动辅助控制。这样,在电动辅助装置1中,能够通过用户4的选择来对电动辅助的有无、电动辅助控制的种类进行选择。
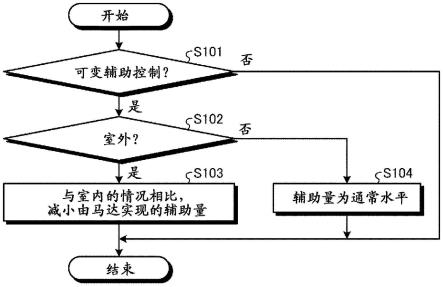
35.图3是表示可变辅助控制的处理流程的流程图。图3所示的处理由控制部15来实施。
36.控制部15判定是否正在执行可变辅助控制(步骤s101)。在步骤s101中,判定是否正在执行使用了马达12的动力的电动辅助控制中的、作为第1控制的可变辅助控制。
37.在判定为未在执行可变辅助控制的情况下(步骤s101:否),该控制例程结束。
38.在判定为正在执行可变辅助控制的情况下(步骤s101:是),控制部15使用来自检测部14的信号,判定轮椅5的当前位置是否为室外3(步骤s102)。在步骤s102中,通过判定部
151判定当前位置是否为室外3。
39.例如在步骤s102中,判定部151基于由气温检测部141检测到的气温,判定当前位置是否为室外3。或者,判定部151基于由紫外线检测部142检测到的紫外线,判定当前位置是否为室外3。或者,判定部151基于由位置信息检测部143检测到的当前位置信息,判定当前位置是否为室外3。
40.在判定为轮椅5的当前位置为室外3的情况下(步骤s102:是),控制部15使由马达12实现的辅助量比位于室内2的情况下的该辅助量小(步骤s103)。在步骤s103中,通过马达控制部152控制马达12的转矩和转速,执行由马达12实现的辅助量变小的控制。在步骤s103中,在由马达12实现的辅助量变小时,马达控制部152对马达12的最高速度、马达12的最大转矩、马达12的最大加速度中的至少任一个进行限制。表示该最高速度、最大转矩、最大加速度的信息被预先存储于存储部16。也即是,控制部15使用保存于存储部16的限制值来减小马达12的输出,减小由马达12实现的辅助量。当实施步骤s103的处理后,该控制例程结束。
41.在判定为轮椅5的当前位置不为室外3的情况下(步骤s102:否),控制部15将由马达12实现的辅助量控制为通常水平(步骤s104)。在步骤s104中,通过达控制部152,马达12的辅助量被控制为通常水平。在步骤s104中,控制部15不使由马达12实现的辅助量从通常水平变化而对其进行维持。当实施步骤s104的处理后,该控制例程结束。
42.图4是表示被切换为固定辅助控制时的处理流程的流程图。此外,图4所示的处理由控制部15来实施。
43.控制部15判定是否从可变辅助控制切换为了固定辅助控制(步骤s201)。在步骤s201中,通过判定部151判定有无向固定辅助控制切换。例如在由用户4操作切换部17、该操作为从可变辅助控制向固定辅助控制的切换操作的情况下,基于从切换部17输入到控制部15的信号,进行由判定部151实现的判定处理。
44.在判定为未从可变辅助控制切换为固定辅助控制的情况下(步骤s201:否),该控制例程结束。
45.在判定为从可变辅助控制切换为了固定辅助控制的情况下(步骤s201:是),控制部15判定是否正在执行由马达12实现的辅助量变小的控制(步骤s202)。在步骤s202中,在由于轮椅5位于室外3而正在执行由马达12实现的辅助量变小的控制的期间中,根据切换部17的操作,判定是否受理到向固定辅助控制的切换要求。
46.在判定为正在执行由马达12实现的辅助量变小的控制的情况下(步骤s202:是),控制部15解除由马达12实现的辅助量变小的控制(步骤s203)。在步骤s203中,通过马达控制部152,减小由马达12实现的辅助量的控制被解除。在该情况下,马达控制部152解除辅助量变小的控制,但继续进行电动辅助控制自身。也即是,通过步骤s203,辅助量进行变化以使得由马达12实现的辅助量变大。当实施步骤s203的处理后,该控制例程结束。
47.在判定为未在实施由马达12实现的辅助量变小的控制的情况下(步骤s203:否),控制部15将由马达12实现的辅助量控制为通常水平(步骤s204)。在步骤s204中,通过马达控制部152,由马达12实现的辅助量被控制为通常水平。在该情况下,在切换前的可变辅助控制的阶段中,辅助量被控制为与室内2的情况下的辅助量相同的大小,因此,在从可变辅助控制向固定辅助控制转变时,辅助量不变化。当实施步骤s204的处理后,该控制例程结
束。
48.此外,步骤s201和步骤s202的处理顺序不限定于图4所示的例子。另外,也可以将步骤s201和步骤s202合并为一个判定步骤。
49.图5是表示在可变辅助控制中所执行的处理流程的流程图。图5所示的处理由控制部15来实施。
50.控制部15判定从开始可变辅助控制起是否经过了预定时间(步骤s301)。控制部15具有对从控制开始起的经过时间进行计测的计时器部。在步骤s301中,通过判定部151判定从控制开始起的经过时间是否超过了预定时间。该预定时间是基于消耗电池11的电力的量与时间的关系等而预先设定的值。在存储部16中保存有预定时间的信息。
51.在判定为从开始可变辅助控制起未经过预定时间的情况下(步骤s301:否),该控制例程结束。
52.在判定为从开始可变辅助控制起经过了预定时间的情况下(步骤s301:是),控制部15进一步减小由马达12实现的辅助量(步骤s302)。在步骤s302中,在已经正在通过马达控制部152实施辅助量变小的控制的期间中,进行控制以使得辅助量进一步变小。也即是,通过步骤s302,由马达12实现的辅助量进一步变小一级。当实施步骤s302的处理后,该控制例程结束。
53.通过实施该步骤s302的处理,能够进一步减小对马达12进行驱动时所消耗的电池11的电力量。由此,能接受由马达12实现的驱动力的辅助的时间变长。
54.图6是表示在可变辅助控制中所执行的其他处理流程的流程图。图6所示的处理由控制部15来实施。
55.控制部15判定当前位置是否靠近可充电地点(步骤s401)。在步骤s401中,使用对由位置信息检测部143检测到的轮椅5的当前位置进行表示的信息、和对设置有外部电源的充电场所进行表示的可充电地点的信息,判定当前位置是否靠近可充电地点。控制部15能够使用保存于存储部16的地图信息来取得可充电地点的信息。并且,判定部151在当前位置与可充电地点之间的移动距离比预定距离短的情况下,判定为当前位置靠近可充电地点。该预定距离被预先存储于存储部16。另外,移动距离既可以是将当前位置与可充电地点连结的直线距离,也可以是从当前位置向可充电地点连接的道路的长度。这些移动距离的信息能够根据保存于存储部16的地图信息来取得。
56.在未判定为当前位置靠近可充电地点的情况下(步骤s401:否),该控制例程结束。
57.在判定为当前位置靠近可充电地点的情况下(步骤s401:是),控制部15解除由马达12实现的辅助量变小的控制(步骤s402)。在步骤s402中,虽然辅助量变小的控制被解除,但持续进行可变辅助控制来作为电动辅助控制。也即是,即使在可变辅助控制中辅助量被控制为通常水平,也能够在将电池11的电力用尽之前到达可充电地点。当实施步骤s402的处理后,该控制例程结束。
58.如以上说明的那样,根据实施方式,能够抑制在外出时电动辅助装置1将电池11的电力用尽。
59.此外,电动辅助装置1不限定于马达12和驱动部件13配置在同一旋转中心轴线上的构造。例如,马达12和驱动部件13也可以经由减速器以能够传递动力的方式相连接。进一步,马达12和驱动部件13也可以配置在不同的旋转中心轴线上。
60.另外,电动辅助装置1不限定于设置在轮椅5的情况。例如,也可以是将对用户4的步行进行辅助的步行辅助装置作为了对象的电动辅助装置1。该步行辅助装置使用由马达12的动力实现的辅助动力。作为步行辅助装置,可举出手推车、对用户4的腿的摆动和关节的屈伸进行辅助的装置等。
61.另外,图3所示的处理也可以在可变辅助控制中被反复执行。在该情况下,步骤s101的处理被省略,从步骤s102开始控制例程。
62.另外,控制部15在正在执行电动辅助控制中的作为第2控制的固定辅助控制的期间中,即使当前位置为室外3,也将由马达12实现的辅助量控制为通常水平。也即是,固定辅助控制中,即使轮椅5从室内2移动至室外3,由马达12实现的辅助量也不变小。例如,即使是在通过判定部151判定为了当前位置为室外3的情况下,在固定辅助控制中,辅助量也被固定为预定值而保持不变。因此,控制部15也可以在执行固定辅助控制的期间中,不实施通过判定部151进行的是否为室外3的判定处理。
63.另外,在固定辅助控制中,预定值也可以能够设定为多级。也即是,也可以能够将辅助量固定为大的辅助量、中等程度的大小以及程度小的大小中的任一个大小。
64.另外,在图5所示的步骤s301中,也可以判定轮椅5停留在室外3的停留时间是否超过了预定时间。在该情况下,控制部15对从判定为当前位置处于室外3的定时起的在室外3的停留时间进行计测。也可以使用该停留时间来进行步骤s301的判定处理。
65.另外,在图6所示的步骤s401中,也可以根据电池11的soc(state of charge,充电状态)与移动距离的关系来进行判定。在该情况下,控制部15基于电池11的soc来算出能够用剩余的电力进行移动的距离。并且,在能够从当前位置起移动的距离的范围内存在可充电地点的情况下,判定为当前位置靠近可充电地点。
66.进一步的效果、变形例能够由本领域技术人员容易地导出。本公开的范围更大的技术方案并不是限定为如上所述表示且记述的特定的详细以及代表性的实施方式。因此,能够不脱离由附带的权利要求及其等同物定义的总括性的公开的概念精神或者范围地进行各种各样的变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。