1.本发明涉及对应于停车场中的自动代客泊车(avp:automated valet parking)服务的车辆以及控制该车辆的方法。
背景技术:
2.日本专利第6342076号公开了作为与停车场中的自动代客泊车服务关联的技术,对在停车场中停泊的车辆提供清洗、燃料补充、检查、修理、换胎等附加服务。
3.日本特表2018-515828公开了一种在车辆在停车场停泊的期间更新储存于车辆的处理装置的软件的技术。
4.已知一种停车场中的自动代客泊车服务。对应于自动代客泊车服务的车辆具有自身位置推定(定位)功能,一边确定停车场内的本车位置一边执行车辆行驶控制。当在向停车场内的泊车位的停泊完成时,车辆结束车辆行驶控制,并保存最终停车位置。在从停车场出库时,车辆读出已保存好的最终停车位置来作为最新的本车位置,并重新开始车辆行驶控制。
5.作为停车场中的自动代客泊车服务的一环,提出了洗车、检查、修理等附加服务。在车辆停放在停车场期间,对车辆实施这样的附加服务。不过,在对车辆实施附加服务时,车辆位置可能会从最终停车位置偏离。例如,由于顶起而车辆位置从最终停车位置偏离。在车辆位置从已保存好的最终停车位置偏离的情况下,在附加服务完成后,使用已保存好的最终停车位置来重新开始车辆行驶控制是不恰当的。这是因为会降低车辆行驶控制的精度。
技术实现要素:
6.本发明的目的之一在于,关于对应于停车场中的自动代客泊车服务的车辆,提供一种在附加服务完成后也能适当地重新开始车辆行驶控制的技术。
7.第一观点与对应于停车场中的自动代客泊车服务的车辆关联。
8.车辆具备:识别传感器,识别车辆的周围的记号;以及处理器。
9.处理器被配置为执行:自身位置推定处理,基于记号的设置位置和通过识别传感器获得的记号的识别结果来确定作为停车场内的车辆的位置的车辆位置;以及车辆行驶控制,基于车辆位置来使车辆在停车场内自动地行驶。
10.自动代客泊车服务包括在车辆停放在停车场期间对车辆实施的附加服务。
11.在附加服务完成后重新开始车辆行驶控制的情况下,处理器在设置有记号的返回空间中执行自身位置推定处理来获取最新的车辆位置,并基于最新的车辆位置来重新开始车辆行驶控制。
12.第二观点除了第一观点之外,还具有以下特征。
13.处理器将最终停车位置保存于存储装置,该最终停车位置是车辆行驶控制的结束时间点的车辆位置。
14.在附加服务完成后重新开始车辆行驶控制的情况下,处理器不使用保存于存储装置的最终停车位置,而是通过在返回空间中执行自身位置推定处理来获取最新的车辆位置。
15.第三观点除了第二观点之外,还具有以下特征。
16.在从停车场出库时重新开始车辆行驶控制的情况下,处理器获取保存于存储装置的最终停车位置来作为最新的车辆位置,并基于最新的车辆位置来重新开始车辆行驶控制。
17.第四观点与控制对应于停车场中的自动代客泊车服务的车辆的车辆控制方法关联。
18.车辆控制方法包括:使用搭载于车辆的识别传感器来识别车辆的周围的记号的处理;自身位置推定处理,基于记号的设置位置和通过识别传感器获得的记号的识别结果来确定作为停车场内的车辆的位置的车辆位置;以及车辆行驶控制,基于车辆位置来使车辆在停车场内自动地行驶。
19.自动代客泊车服务包括在车辆停放在停车场期间对车辆实施的附加服务。
20.车辆控制方法还包括在附加服务完成后重新开始车辆行驶控制的第一重新开始处理。
21.在第一重新开始处理中,在设置有记号的返回空间中执行自身位置推定处理来获取最新的车辆位置,并基于最新的车辆位置来重新开始车辆行驶控制。
22.第五观点除了第四观点之外,还具有以下特征。
23.车辆控制方法还包括将最终停车位置保存于存储装置的处理,该最终停车位置是车辆行驶控制的结束时间点的车辆位置。
24.第一重新开始处理不使用保存于存储装置的最终停车位置,而是通过在返回空间中执行自身位置推定处理来获取最新的车辆位置。
25.第六观点除了第五观点之外,还具有以下特征。
26.车辆控制方法还包括在从停车场出库时重新开始车辆行驶控制的第二重新开始处理。
27.在第二重新开始处理中,获取保存于存储装置的最终停车位置来作为最新的车辆位置,并基于最新的车辆位置来重新开始车辆行驶控制。
28.根据本发明,在附加服务完成后重新开始车辆行驶控制的情况下,在设置有记号的返回空间执行自身位置推定处理。因此,即使在附加服务期间车辆位置偏离,也可高精度地获得最新的车辆位置。由此,能适当地重新开始车辆行驶控制。
附图说明
29.以下,参照附图,对本发明的示例性实施例的特征、优点以及技术和工业意义进行说明,其中,相同的附图标记表示相同的元件,其中:
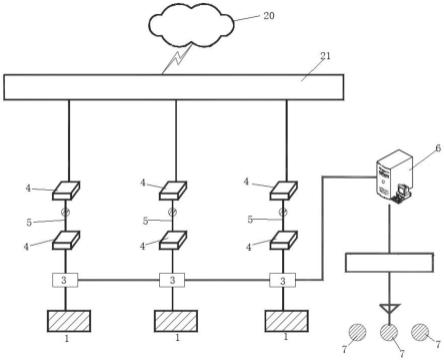
30.图1是用于说明本发明的实施方式的自动代客泊车系统的概要的概念图。
31.图2是表示本发明的实施方式的avp车辆的构成例的框图。
32.图3是用于说明本发明的实施方式的附加服务的概念图。
33.图4是表示本发明的实施方式的与附加服务关联的处理的流程图。
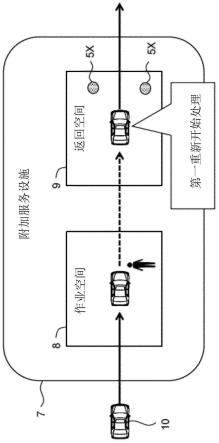
34.图5是用于说明本发明的实施方式的附加服务完成后的车辆行驶控制的重新开始的概念图。
35.图6是表示本发明的实施方式的用于重新开始avp车辆的车辆行驶控制的重新开始处理的流程图。
36.图7是表示本发明的实施方式的自动代客泊车系统的构成例的概略图。
具体实施方式
37.参照附图,对本发明的实施方式进行说明。
38.1.自动代客泊车系统的概要
39.图1是用于说明本实施方式的自动代客泊车系统100的概要的概念图。自动代客泊车系统100管理并提供停车场1中的自动代客泊车(avp:automated valet parking)服务。
40.以下,对应于自动代客泊车服务的车辆称为“avp车辆10”。avp车辆10能与自动代客泊车系统100进行通信。此外,avp车辆10至少能在停车场1中不依赖于由驾驶员进行的驾驶操作地行驶。avp车辆10也可以是自动驾驶车辆。
41.停车场1至少由avp车辆10利用。停车场1也可以由avp车辆10以外的一般车辆利用。
42.停车场1包括:上下车区域2、通路3以及多个泊车位4。在上下车区域2,入库到停车场1的avp车辆10或从停车场1出库的avp车辆10停止。在上下车区域2中,乘坐者从avp车辆10下车或乘入avp车辆10。通路3是供诸如avp车辆10、一般车辆的车辆行驶的区域。泊车位4是供诸如avp车辆10、一般车辆的车辆停泊的空间。例如,泊车位4由划分线划分。
43.可以在停车场1内的规定位置配置有记号5(地标)。记号5用于在停车场1内引导avp车辆10。作为记号5,可举例示出标记、柱等。典型的是,多个记号5被分散地配置在停车场1内。
44.以下,对某位用户x利用自动代客泊车服务时的流程的一个例子进行说明。设为用户x的会员信息被预先登记到自动代客泊车系统100。用户x所利用的avp车辆10的汽车登记编号(记载于车牌的编号)可以与用户x的会员信息一起被预先登记到自动代客泊车系统100。
45.终端装置200是由用户x操作的终端装置。典型的是,终端装置200由用户x所有。作为终端装置200,可举例示出智能手机、平板电脑、个人计算机、搭载于avp车辆10的hmi(human-machine interface:人机界面)等。终端装置200能与自动代客泊车系统100进行通信。
46.首先,用户x进行自动代客泊车的预约。例如,用户x操作终端装置200来输入用户x的id信息、所希望的停车场1、希望利用日、希望利用时间(希望入库时间和希望出库时间)等。用户x也可以输入avp车辆10的汽车登记编号。终端装置200将包括被输入的信息的预约信息发送至自动代客泊车系统100。自动代客泊车系统100基于预约信息来进行预约处理,并将预约完成通知发送至终端装置200。此外,自动代客泊车系统100将与预约信息相应的认证信息发送至终端装置200。终端装置200接受认证信息,并保持所接受的认证信息。
47.avp车辆10向停车场1的入库如下所述。载有用户x的avp车辆10到达停车场1的上下车区域2并停止。在上下车区域2中,用户x(如果有其他乘坐者的话同样)从avp车辆10下
车。然后,用户x使用保持在终端装置200的认证信息来请求avp车辆10的入库。例如,用户x将认证信息从终端装置200发送至自动代客泊车系统100。或者,用户x可以使设置于上下车区域2的读取器读取认证信息(例如qr码(注册商标))。
48.自动代客泊车系统100响应于入库请求而进行用户x的认证。例如,自动代客泊车系统100通过将认证信息与预约信息对照来进行用户x的认证。此外,自动代客泊车系统100也可以使用设置于上下车区域2的摄像机来读取记载于avp车辆10的车牌的汽车登记编号。然后,自动代客泊车系统100可以通过将读取到的汽车登记编号与预先登记的或预约信息中所包括的汽车登记编号对照来进行avp车辆10的认证。
49.当认证完成时,avp车辆10的操作权限从用户x转移给自动代客泊车系统100。自动代客泊车系统100进行与avp车辆10有关的入库处理。
50.在入库处理中,自动代客泊车系统100与avp车辆10进行通信,起动avp车辆10(点火接通(on))。
51.此外,自动代客泊车系统100参照停车场1的利用状况来将空的泊车位4分配给avp车辆10。然后,自动代客泊车系统100与avp车辆10进行通信,将入库引导信息提供给avp车辆10。入库引导信息包括所分配的泊车位4的信息和停车场1的地图信息。自动代客泊车系统100可以指定从上下车区域2到所分配的泊车位4的行驶路线。在该情况下,入库引导信息包括所指定的行驶路线的信息。
52.之后,自动代客泊车系统100与avp车辆10进行通信,许可入库。
53.当接受入库许可时,avp车辆10开始车辆行驶控制。具体而言,avp车辆10基于入库引导信息来在通路3从上下车区域2自动地行驶到被分配的泊车位4,并自动地停泊在被分配的泊车位4。此时,avp车辆10也可以沿着由自动代客泊车系统100指定的行驶路线行驶。自动代客泊车系统100也可以与avp车辆10进行通信,远程控制avp车辆10的行驶。
54.当停泊完成时,avp车辆10将停泊完成通知给自动代客泊车系统100。或者,自动代客泊车系统100也可以使用设置于停车场1的基础设施传感器来感测avp车辆10的停泊已完成。在停泊完成后,自动代客泊车系统100与avp车辆10进行通信,使avp车辆10的动作停止(点火断开(off))。自动代客泊车系统100以将avp车辆10的泊车位4的信息与用户x建立关联的方式保持avp车辆10的泊车位4的信息。
55.avp车辆10从停车场1的出库如下所述。用户x使用终端装置200来请求avp车辆10的出库。出库请求包括认证信息、用户x所指定的上下车区域2的信息等。自动代客泊车系统100响应于出库请求而进行用户x的认证,并进行与avp车辆10有关的出库处理。
56.在出库处理中,自动代客泊车系统100与avp车辆10进行通信,起动avp车辆10(点火接通(on))。
57.此外,自动代客泊车系统100与avp车辆10进行通信,将出库引导信息提供给avp车辆10。出库引导信息包括由用户x指定的上下车区域2的信息和停车场1的地图信息。自动代客泊车系统100可以指定从泊车位4到被指定的上下车区域2的行驶路线。在该情况下,出库引导信息包括所指定的行驶路线的信息。
58.之后,自动代客泊车系统100与avp车辆10进行通信,许可出库。
59.当接受出库许可时,avp车辆10开始车辆行驶控制。具体而言,avp车辆10基于出库引导信息来在通路3从泊车位4自动地行驶到被指定的上下车区域2。此时,avp车辆10也可
以沿着由自动代客泊车系统100指定的行驶路线行驶。自动代客泊车系统100也可以与avp车辆10进行通信,远程控制avp车辆10的行驶。
60.avp车辆10到达由用户x指定的上下车区域2并停止。avp车辆10的操作权限从自动代客泊车系统100转移给用户x。用户x(如果有其他乘坐者的话同样)乘入avp车辆10。avp车辆10朝向下一目的地出发。
61.2.avp车辆
62.2-1.构成例
63.图2是表示本实施方式的avp车辆10的构成例的框图。avp车辆10具备:通信装置20、车辆状态传感器30、识别传感器40、行驶装置50以及控制装置60。
64.通信装置20与avp车辆10的外部进行通信。例如,通信装置20与自动代客泊车系统100进行通信。
65.车辆状态传感器30检测avp车辆10的状态。作为车辆状态传感器30,可举例示出车速传感器、转向角传感器、横摆角速度传感器、横向加速度传感器等。
66.识别传感器40识别(检测)avp车辆10的周围的状况。作为识别传感器40,可举例示出摄像机、激光雷达(lidar:laser imaging detection and ranging(激光成像探测和测距))、雷达、声纳等。
67.行驶装置50包括转向装置、驱动装置以及制动装置。转向装置对avp车辆10的车轮进行转舵。例如,转向装置包括动力转向(eps:electric power steering(电动转向))装置。驱动装置是产生驱动力的动力源。作为驱动装置,可举例示出发动机、电动机、轮内马达等。制动装置产生制动力。
68.控制装置60控制avp车辆10。控制装置60也称为ecu(electronic control unit:电子控制单元)。该控制装置60具备一个或多个处理器70和一个或多个存储装置80。处理器70执行各种处理。在存储装置80储存有各种信息。作为存储装置80,可举例示出易失性存储器、非易失性存储器、hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态硬盘)等。通过一个或多个处理器70执行作为计算机程序的控制程序,由控制装置60进行的各种处理被实现。控制程序储存于存储装置80或记录于计算机可读取记录介质。
69.2-2.信息获取处理
70.处理器70(控制装置60)执行获取各种信息的信息获取处理。各种信息包括停车场地图信息map、车辆状态信息sta、周边状况信息sur、定位信息loc等。这些获取到的信息储存于存储装置80。
71.停车场地图信息map是停车场1的地图信息。具体而言,停车场地图信息map表示停车场1中的上下车区域2、通路3、泊车位4以及记号5的配置。例如,记号5设置于停车场1内的规定位置。停车场地图信息map表示该记号5的规定位置。停车场地图信息map由自动代客泊车系统100提供。处理器70经由通信装置20从自动代客泊车系统100获取停车场地图信息map。
72.车辆状态信息sta是表示avp车辆10的状态的信息,表示由车辆状态传感器30得到的检测结果。作为avp车辆10的状态,可举例示出车速、转向角(车轮的转舵角)、横摆角速度、横向加速度等。处理器70从车辆状态传感器30获取车辆状态信息sta。
73.周边状况信息sur是表示avp车辆10的周围的状况的信息,表示由识别传感器40得
到的识别结果。例如,周边状况信息sur包括由摄像机拍摄的图像信息。作为其他的例子,周边状况信息sur包括表示由激光雷达、雷达得到的计测结果的计测信息。而且,周边状况信息sur包括与avp车辆10的周边的物体有关的信息(例如:位置、相对速度)。作为avp车辆10的周边的物体,可举例示出通路3、泊车位4、记号5、白线、其他车辆、构造物(例如:墙、柱)等。能基于上述的图像信息和计测信息中的至少一方来识别avp车辆10的周边的物体,还能计算识别出的物体的相对位置、相对速度。而且,能通过将物体的相对位置与后述的车辆位置组合来计算停车场1中的物体的位置(绝对位置)。如此,处理器70能基于由识别传感器40得到的识别结果来获取(生成)周边状况信息sur。
74.此外,处理器70(控制装置60)执行确定停车场1中的avp车辆10的位置和方位的“自身位置推定处理(localization:定位)”。以下,停车场1中的avp车辆10的位置和方位称为“车辆位置”。处理器70利用通过识别传感器40获得的记号5的识别结果,即上述的周边状况信息sur来确定车辆位置。更详细而言,处理器70基于车辆状态信息sta(车速、转向角)来计算avp车辆10的移动量,由此大致计算出车辆位置。进而,处理器70通过将停车场地图信息map所指示的记号5的设置位置与周边状况信息sur所指示的记号5的识别位置对照来校正车辆位置。由此,能高精度地确定(推定)车辆位置。能通过重复移动量的计算和车辆位置的校正来持续获得高精度的车辆位置。
75.定位信息loc表示由自身位置推定处理确定的车辆位置。如上所述,自身位置推定处理基于周边状况信息sur,即由识别传感器40得到的识别结果而执行。就是说,定位信息loc与周边状况信息sur同样地基于由识别传感器40得到的识别结果而生成。
76.2-3.通信处理
77.处理器70(控制装置60)经由通信装置20与自动代客泊车系统100进行通信。例如,处理器70从自动代客泊车系统100接受上述的入库引导信息、出库引导信息。此外,处理器70将上述的车辆状态信息sta、定位信息loc定期发送至自动代客泊车系统100。
78.2-4.车辆行驶控制
79.处理器70(控制装置60)执行不依赖于驾驶员的驾驶操作地控制avp车辆10的行驶的“车辆行驶控制”。车辆行驶控制包括转向控制、加速控制以及减速控制。处理器70通过控制行驶装置50来执行车辆行驶控制。具体而言,处理器70通过控制转向装置来执行转向控制。此外,处理器70通过控制驱动装置来执行加速控制。此外,处理器70通过控制制动装置来执行减速控制。
80.在停车场1内,处理器70执行车辆行驶控制,以使avp车辆10自主行驶。具体而言,处理器70基于停车场地图信息map和定位信息loc来掌握停车场1的地图和停车场1内的车辆位置。然后,处理器70执行车辆行驶控制,以使avp车辆10朝向目的地自动地行驶。
81.例如,在上述的入库处理的情况下,出发地为上下车区域2,目的地为被分配的泊车位4。处理器70执行车辆行驶控制,以使avp车辆10从上下车区域2自动地行驶到被分配的泊车位4,并自动地停泊在泊车位4。被分配的泊车位4的位置从停车场地图信息map获得。处理器70可以执行车辆行驶控制,以使avp车辆10沿着由自动代客泊车系统100指定的行驶路线行驶。在将avp车辆10停泊在泊车位4时,也可以通过参照周边状况信息sur来掌握泊车位4、周边的停泊状况。也可以通过参照周边状况信息sur来执行车辆行驶控制,以避免与其他车辆、构造物的碰撞。
82.出库处理也是同样的。在出库处理的情况下,出发地是被分配的泊车位4,目的地是上下车区域2。处理器70执行车辆行驶控制,以使avp车辆10从泊车位4自动地行驶到上下车区域2,并在上下车区域2自动停止。
83.3.附加服务
84.也考虑有效利用avp车辆10停放在停车场1期间(就是说,乘坐者未乘坐avp车辆10期间)来将停泊服务以外的“附加服务”提供给avp车辆10。作为附加服务,可举例示出avp车辆10的洗车、检查、修理、燃料补充、充电、换胎等。这样的附加服务是自动代客泊车服务的一环。
85.图3是用于说明本实施方式的附加服务的概念图。附加服务设施7是用于对avp车辆10实施附加服务的设施。附加服务设施7存在于停车场1内或附属于停车场1。
86.avp车辆10的用户x考虑在将avp车辆10停放在停车场1期间利用附加服务信息asv。自动代客泊车系统100可以将建议附加服务的信息发送至终端装置200。用户x当决定利用附加服务时,操作终端装置200来将附加服务请求req发送至自动代客泊车系统100。附加服务请求req是请求附加服务的利用的信息。
87.图4是表示本实施方式的与附加服务关联的处理的流程图。
88.在步骤s100中,自动代客泊车系统100判定是否从终端装置200接受了附加服务请求req。在自动代客泊车系统100接受了附加服务请求req的情况下(步骤s100;是),处理进入步骤s110。
89.在步骤s110中,自动代客泊车系统100进行使avp车辆10向附加服务设施7移动的移动处理(参照图3)。该移动处理与入库处理、出库处理同样地进行。出发地是停泊有avp车辆10的泊车位4,目的地是附加服务设施7。自动代客泊车系统100指定目的地,并指示avp车辆10移动至该目的地。avp车辆10(处理器70)执行车辆行驶控制,以使avp车辆10从泊车位4自动地行驶到附加服务设施7。之后,处理进入步骤s120。
90.在步骤s120中,自动代客泊车系统100对操作者指示附加服务的实施。操作者对avp车辆10实施附加服务。当附加服务完成时,操作者将意在表示附加服务完成的信息通知给自动代客泊车系统100。之后,处理进入步骤s130。
91.在步骤s130中,自动代客泊车系统100进行使avp车辆10向原来的泊车位4移动的移动处理。该移动处理与入库处理、出库处理同样地进行。出发地是附加服务设施7,目的地是原来的泊车位4。自动代客泊车系统100指定目的地,并指示avp车辆10移动至该目的地。avp车辆10(处理器70)执行车辆行驶控制,以使avp车辆10从附加服务设施7自动地行驶到泊车位4,并自动地停泊在泊车位4。自动代客泊车系统100可以将表示附加服务的完成的信息发送至终端装置200。
92.在自动代客泊车服务包括附加服务的情况下,自动代客泊车服务的便利性和有用性进一步提高。
93.4.重新开始处理
94.如上所述,avp车辆10的处理器70一边进行自身位置推定处理来确定车辆位置一边进行车辆行驶控制。当向被分配的泊车位4的停泊完成时,处理器70结束车辆行驶控制,并将结束时间点的定位信息loc保存于存储装置80。为方便起见,将车辆行驶控制的结束时间点的定位信息loc所指示的车辆位置称为“最终停车位置”。
95.在从停车场1出库时,需要重新开始车辆行驶控制。以下,将该处理称为“重新开始处理”。在通常的重新开始处理中,处理器70读出保存于存储装置80的定位信息loc,获取定位信息loc所指示的最终停车位置来作为最新的车辆位置。然后,处理器70基于最新的车辆位置来重新开始车辆行驶控制。
96.接着,考虑对avp车辆10实施上述的附加服务的情况。在对avp车辆10实施附加服务时,车辆位置可能会从最终停车位置偏离。例如,由于顶起而车辆位置从最终停车位置偏离。在车辆位置从已保存好的最终停车位置偏离的情况下,在附加服务完成后,使用已保存好的最终停车位置来重新开始车辆行驶控制是不恰当的。这是因为会降低车辆行驶控制的精度。
97.因此,根据本实施方式,在附加服务完成后重新开始车辆行驶控制的情况下,使用与通常的重新开始处理不同的方法。
98.图5是用于说明附加服务完成后的车辆行驶控制的重新开始的概念图。附加服务设施7包括作业空间8和返回空间9。在附加服务被实施时,avp车辆10被配置于作业空间8。操作者对被配置于作业空间8的avp车辆10实施附加服务。当附加服务完成时,操作者使avp车辆10移动至规定的返回空间9。然后,操作者将附加服务完成通知给自动代客泊车系统100。
99.在返回空间9设置有与停车场1内的记号5同样的记号5x。记号5x的设置位置包含在停车场地图信息map中。处理器70能利用设置于返回空间9的记号5x来执行自身位置推定处理,从而获取最新的车辆位置。
100.更详细而言,处理器70获取作为大致的车辆位置的“基准车辆位置”。基准车辆位置例如是返回空间9的位置。作为其他的例子,基准车辆位置可以是根据由基础设施摄像机得到的拍摄结果而计算出的avp车辆10的位置。这样的基准车辆位置从自动代客泊车系统100被通知给处理器70。此外,处理器70使用识别传感器40来识别记号5x。然后,处理器70通过将停车场地图信息map所指示的记号5x的设置位置与由识别传感器40识别出的记号5x的识别位置对照来校正车辆位置。
101.如此,通过利用设置于返回空间9的记号5x,即使在附加服务完成后也能高精度地获取最新的车辆位置。处理器70基于获取到的最新的车辆位置来重新开始车辆行驶控制。以下,将这样的附加服务完成后的重新开始处理称为“第一重新开始处理”。
102.图6是表示本实施方式的重新开始处理的流程图。在是附加服务完成后的重新开始处理的情况下(步骤s200;是),进行第一重新开始处理(步骤s210)。在除此以外的情况下(步骤s200;否(no)),进行第二重新开始处理(通常的重新开始处理)(步骤s220)。
103.在第一重新开始处理中,处理器70在设置有记号5x的规定的返回空间9中执行自身位置推定处理。具体而言,处理器70使用识别传感器40来识别记号5x,并基于记号5x的识别结果来执行自身位置推定处理,从而获取最新的车辆位置。需要注意,在该第一重新开始处理中,不利用保存于存储装置80的最终停车位置。即,处理器70不使用保存于存储装置80的最终停车位置,而是执行自身位置推定处理来获取最新的车辆位置。然后,处理器70基于获取到的最新的车辆位置来重新开始车辆行驶控制。
104.在第二重新开始处理(通常的重新开始处理)中,处理器70读出保存于存储装置80的定位信息loc,获取定位信息loc所指示的最终停车位置来作为最新的车辆位置。然后,处
理器70基于获取到的最新的车辆位置来重新开始车辆行驶控制。
105.如以上所说明的那样,根据本实施方式,在附加服务完成后重新开始车辆行驶控制的情况下,在设置有记号5x的返回空间9中执行自身位置推定处理。因此,即使在附加服务期间车辆位置偏离,也可高精度地获得最新的车辆位置。由此,能适当地重新开始车辆行驶控制。
106.5.自动代客泊车系统的具体例
107.图7是表示本实施方式的自动代客泊车系统100的构成例的概略图。自动代客泊车系统100包括:车辆管理中心110、管制中心120以及基础设施摄像机130。管制中心120设置于每个停车场1。因此,存在与停车场1相同个数的管制中心120。车辆管理中心110总管所有的管制中心120。基础设施摄像机130设置于停车场1,识别停车场1内的状况。例如,基础设施摄像机130对停车场1内的avp车辆10进行拍摄。
108.车辆管理中心110包括信息处理装置(车辆管理服务器)。信息处理装置包括处理器111和存储装置112。在存储装置112储存有各种信息。作为存储装置112,可举例示出易失性存储器、非易失性存储器、hdd、ssd等。处理器111通过执行储存于存储装置112的计算机程序来执行各种信息处理。此外,处理器111与管制中心120、avp车辆10以及终端装置200进行通信。
109.管制中心120包括信息处理装置(管制装置)。信息处理装置包括处理器121和存储装置122。在存储装置122储存有各种信息。作为存储装置122,可举例示出易失性存储器、非易失性存储器、hdd、ssd等。处理器121通过执行储存于存储装置122的计算机程序来执行各种信息处理。此外,处理器121与车辆管理中心110、avp车辆10以及基础设施摄像机130进行通信。
110.本实施方式的由自动代客泊车系统100进行的处理由车辆管理中心110的处理器111和管制中心120的处理器121中的至少一方来执行。即,本实施方式的由自动代客泊车系统100进行的处理由一个或多个处理器(111、121)来执行。此外,处理所需的信息储存于车辆管理中心110的存储装置112和管制中心120的存储装置122中的至少一方。即,处理所需的信息储存于一个或多个存储装置(112、122)。
111.例如,自动代客泊车系统100的一个或多个处理器(111、121)执行与图4所示的附加服务关联的处理。
112.在步骤s100中,车辆管理中心110的处理器111从终端装置200接受附加服务请求req。处理响应于附加服务请求req而进入步骤s110。
113.在步骤s110中,车辆管理中心110的处理器111与avp车辆10进行通信,起动avp车辆10(点火接通(on))。进而,处理器111与管制中心120进行通信,指示管制中心120执行移动处理。管制中心120的处理器121将移动处理指示信息发送至avp车辆10。移动处理指示信息指示作为目的地的附加服务设施7。avp车辆10响应于移动处理指示信息而从泊车位4自动地行驶到附加服务设施7。
114.当到达目的地(附加服务设施7)时,avp车辆10将到达通知发送至管制中心120。管制中心120的处理器121从avp车辆10接受到达通知。处理器121将到达通知转送至车辆管理中心110。车辆管理中心110的处理器111从管制中心120接受到达通知。然后,处理器111与avp车辆10进行通信,使avp车辆10的动作停止(点火断开(off))。
115.在步骤s120中,管制中心120的处理器121对操作者指示附加服务的实施。操作者对avp车辆10实施附加服务。当附加服务完成时,操作者将avp车辆10配置于上述的返回空间9。然后,操作者将附加服务完成通知给管制中心120。管制中心120的处理器121将附加服务完成通知给车辆管理中心110。
116.在步骤s130中,车辆管理中心110的处理器111与avp车辆10进行通信,起动avp车辆10(点火接通(on))。进而,处理器111与管制中心120进行通信,指示管制中心120执行移动处理。管制中心120的处理器121将移动处理指示信息发送至avp车辆10。移动处理指示信息指示作为目的地的原来的泊车位4。
117.在附加服务完成后的定时,移动处理指示信息指示avp车辆10执行上述的“第一重新开始处理”。而且,移动处理指示信息指示基准车辆位置。例如,基准车辆位置是返回空间9的位置。或者,基准车辆位置可以是根据由基础设施摄像机130得到的拍摄结果而计算出的avp车辆10的位置。
118.avp车辆10执行第一重新开始处理。就是说,avp车辆10识别设置于返回空间9的记号5x,并基于记号5x的识别结果来执行自身位置推定处理,从而获取最新的车辆位置。然后,avp车辆10重新开始车辆行驶控制,并从返回空间9自动地行驶到原来的泊车位4。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。