1.本技术实施例涉及机器皮肤领域,尤其涉及一种用于调节皮肤温度的机器皮肤。
背景技术:
2.目前,随着工业化的发展,工业机器人技术逐渐成熟,各种类型的特种机器人层出不穷,为人们的日常生产和生活带来了极大便利。常见的机器人包括服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人、机器人化机器等特种机器人以及应用于工业生产的机械臂、搬运机器人等工业机器人。某些类型的机器人不断向着拟人的方向发展,不仅可以模拟人的外形,还可以模拟人的皮肤,使机器人也能像人一样拥有触感。
3.然而,现有技术中,部分机器人对机器皮肤做类似人类皮肤植入,使得更接近人类,但是却不存在生物特征,机器皮肤的温度和人体温度差异大。现有的机器皮肤至是简单的将加热装置安装于机器皮肤内层,做到具备温度。但是,驱动机器人工作的动力模组工作时会发热,若不能有效散热,不仅机器皮肤温度出现异常,而且会降低机器人的使用寿命。并且,当机器人处于低温环境下工作时,如果不能快速增加热量保温,同样会令机器皮肤温度出现异常,而且会降低机器人的使用寿命。
4.综上所述,现有的机器皮肤无法做到根据机器人实际运行情况进行温度调节,降低机器人的使用寿命。
技术实现要素:
5.本技术公开了一种用于调节皮肤温度的机器皮肤,用于提高机器人的使用寿命。
6.本技术公开了一种用于调节皮肤温度的机器皮肤,机器皮肤由内至外依次包括温度控制层、第一疏油层、油路层、第二疏油层和接触层,还包括控制器;
7.控制器与温度控制层连接,控制器用于接收温度控制层检测到的温度,并根据温度进行控制温度控制层产生热量;
8.控制器与液压泵连接,油路层与液压泵连接,控制器还用于控制液压泵将降温液流通于油路层,油路层用于为机器皮肤降温;
9.第一疏油层和第二疏油层用于隔离油路层;
10.接触层用于与外界接触。
11.可选的,温度控制层由内至外依次包括第一覆盖膜、第一环氧树脂层、第一铜箔、传感器层、第二铜箔、第二环氧树脂层、第二覆盖膜;
12.传感器层与控制器连接,传感器层用于检测温度,第一铜箔和第二铜箔用于形成加热电路;第一环氧树脂层和第二环氧树脂层用于绝缘。
13.可选的,传感器层包括温度传感器、导热凝胶和加热电阻;
14.导热凝胶内部设置有至少一个加热电阻和至少一个温度传感器,导热凝胶用于传导热量;
15.温度传感器与控制器连接,加热电阻、第一铜箔和第二铜箔形成加热电路,控制器
还用于控制加热电路通电发热,温度传感器用于检测温度。
16.可选的,在温度控制层内部还包括导热层,导热层用于将热量传递至温度控制层。
17.可选的,第一疏油层包括第一聚氯乙烯层和第一纳米二氧化硅镀层;
18.第二疏油层包括第二聚氯乙烯层和第二纳米二氧化硅镀层;
19.第一纳米二氧化硅镀层和第二纳米二氧化硅镀层贴近油路层。
20.可选的,油路层包括丁腈橡胶、油路、进油口和出油口;
21.丁腈橡胶中设置有油路,油路用于通过降温液;
22.进油口和出油口分别连接液压泵的出液口和进液口。
23.可选的,接触层为硅橡胶或热塑性聚氨酯弹性体橡胶。
24.可选的,在第二疏油层和接触层之间还包括同温层,同温层用于缓冲温度控制层和油路层的升温与降温速度。
25.可选的,在第二疏油层和接触层之间依次还包括缓冲层,缓冲层缓冲接触层收到的压力。
26.可选的,缓冲层为人工软骨泡沫或导热硅胶。
27.从以上技术方案可以看出,本技术实施例具有以下优点:
28.本技术中,首先,接触层为直接接触外界的部分,可以接收到外界的温度和压力,模拟人体皮肤表层。第一疏油层和第二疏油层主要用于将油路层进行隔离,防止降温液或是其他液体渗出,影响机器皮肤的使用寿命。温度控制层将温度信息进行采集,向控制器传输,控制器将温度信息进行分析,判断当前机器皮肤的温度是否处于设置的温度范围内。当机器皮肤的温度过低时,控制器控制温度控制层产生热量,使得机器皮肤温度保持恒定。当机器皮肤的温度过高时,控制液压泵将降温液流通于油路层,降温液会带走多余的热量,使得机器皮肤温度保持恒定,使得机器人处于安全工作温度,提高机器人的使用寿命并且导热层会将机器人内部的热量传输至机器皮肤中,使得控制器可以检测到机器人温度状态,并且可以针对机器人全身或是某一部分机器皮肤进行增温或散热,使得机器人处于安全工作温度,提高机器人的使用寿命。
附图说明
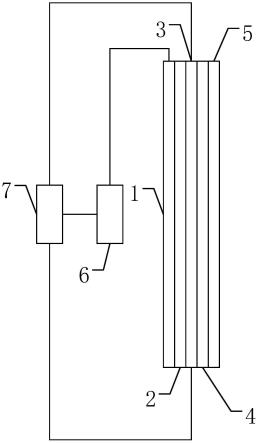
29.图1为本技术实施例中用于调节皮肤温度的机器皮肤的一个实施例示意图;
30.图2为本技术实施例中用于调节皮肤温度的机器皮肤的另一个实施例示意图;
31.图3为本技术实施例中温度控制层的一个实施例示意图;
32.图4为本技术实施例中传感器层的一个实施例示意图;
33.图5为本技术实施例中油路层的一个实施例示意图。
具体实施方式
34.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
35.应当理解,当在本技术说明书和所附权利要求书中使用时,术语“包括”指示所描
述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
36.还应当理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
37.如在本技术说明书和所附权利要求书中所使用的那样,术语“如果”可以依据上下文被解释为“当...时”或“一旦”或“响应于确定”或“响应于检测到”。类似地,短语“如果确定”或“如果检测到[所描述条件或事件]”可以依据上下文被解释为意指“一旦确定”或“响应于确定”或“一旦检测到[所描述条件或事件]”或“响应于检测到[所描述条件或事件]”。
[0038]
另外,在本技术说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0039]
在本技术说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
[0040]
现有技术中,部分机器人对机器皮肤做类似人类皮肤植入,使得更接近人类,但是却不存在生物特征,机器皮肤的温度和人体温度差异大。现有的机器皮肤至是简单的将加热装置安装于机器皮肤内层,做到具备温度。但是,驱动机器人工作的动力模组工作时会发热,若不能有效散热,不仅机器皮肤温度出现异常,而且会降低机器人的使用寿命。并且,当机器人处于低温环境下工作时,如果不能快速增加热量保温,同样会令机器皮肤温度出现异常,而且会降低机器人的使用寿命。
[0041]
基于此,本技术公开了一种用于调节皮肤温度的机器皮肤,用于提高机器人的使用寿命。
[0042]
下面将结合本技术实施例中的附图,对本技术中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0043]
请参考图1至图5,本技术公开了一种用于调节皮肤温度的机器皮肤,包括:
[0044]
机器皮肤由内至外依次包括温度控制层1、第一疏油层2、油路层3、第二疏油层4和接触层5,还包括控制器6;
[0045]
控制器6与温度控制层1连接,控制器6用于接收温度控制层1检测到的温度,并根据温度进行控制温度控制层1产生热量;
[0046]
控制器6与液压泵7连接,油路层3与液压泵7连接,控制器6还用于控制液压泵7将降温液流通于油路层3,油路层3用于为机器皮肤降温;
[0047]
第一疏油层2和第二疏油层4用于隔离油路层3;
[0048]
接触层5用于与外界接触。
[0049]
温度控制层1主要用于检测温度以及热量生成,调节机器皮肤的温度。
[0050]
第一疏油层2和第二疏油层4用于隔离油路层3,防止油路层3中的降温液渗出腐蚀
机器皮肤。
[0051]
油路层3中包含着多条流通管道,模拟人体血管的走向,在液压泵7工作时,降温液沿着油路层3中的流通管道进行流通,起到降温效果,液压泵7的工作模式也是由控制器6控制。
[0052]
可选的,温度控制层1由内至外依次包括第一覆盖膜11、第一环氧树脂层12、第一铜箔13、传感器层14、第二铜箔15、第二环氧树脂层16、第二覆盖膜17;
[0053]
传感器层14与控制器6连接,传感器层14用于检测温度,第一铜箔13和第二铜箔15用于形成加热电路;第一环氧树脂层12和第二环氧树脂层16用于绝缘。
[0054]
第一覆盖膜11和第二覆盖膜17为聚氨酯,聚氨酯(简称pur和pu)是由氨基甲酸酯连接的有机单元组成的聚合物。虽然大多数聚氨酯是热固性聚合物,加热时不会熔化,但是聚氨酯也有热塑性。聚氨酯聚合物传统上并且最常见的是通过二聚或三聚异氰酸酯与多元醇反应聚合的。因为聚氨酯含有两种单体,它们一种接一种地交替聚合,所以它们被归类为交替共聚物。用于制备聚氨酯的异氰酸酯和多元醇平均每个分子含有两种或多种官能团。本实施例中的第一覆盖膜11和第二覆盖膜17为聚氨酯构成,第一覆盖膜11和第二覆盖膜17在机器皮肤中作为接触层材料,聚氨酯厚度可设置为0.0125-0.05mm,具体需要按照机器人实际情况设置。第一覆盖膜11和第二覆盖膜17用于密封温度控制层1。
[0055]
环氧树脂,又称人造树脂,是一类分子结构中含有两个以上环氧基团的有机高分子聚合物,一种热固性塑料。它们可与多种类型的固化剂发生交联反应而形成不溶、不熔的具有三向网状结构的高聚物,其具有优良的绝缘性能、力学性能及化学稳定性等,被广泛用于黏合剂、涂料等领域。本实施例中的第一环氧树脂层12和第二环氧树脂层16用于进行绝缘,其中,第一环氧树脂层12和第二环氧树脂层16的厚度可设置为0.02-0.05mm,具体需要按照机器人实际情况设置。第一铜箔13和第二铜箔15的厚度可以设置为0.0175-0.07mm,第一铜箔13为正极,绣刻电路,第二铜箔15为负极,绣刻电路。传感器层14包括温度传感器、导热凝胶和加热电阻,导热凝胶内部设置有至少一个加热电阻和至少一个温度传感器,由导热凝胶包裹温度传感器和加热电阻,温度传感器用于采集温度信息,加热电阻在第一铜箔13和第二铜箔15的基础上可形成加热电路进行产热。
[0056]
可选的,传感器层14包括温度传感器141、导热凝胶142和加热电阻143;
[0057]
导热凝胶142内部设置有至少一个加热电阻143和至少一个温度传感器141,导热凝胶142用于传导热量;
[0058]
温度传感器141与控制器6连接,加热电阻143、第一铜箔13和第二铜箔15形成加热电路,控制器6还用于控制加热电路通电发热,温度传感器141用于检测温度。
[0059]
导热凝胶142是有机硅双组份膏状导热填充材料,亲和性好、耐候性好、耐高低温性以及绝缘性好,可塑性强,能够填充不平整的界面,可以满足机器皮肤各种应用下的传热需求,还具有高效导热性能、低压力、高压缩比、高电气绝缘等特点。
[0060]
可选的,在温度控制层1内部还包括导热层8,导热层8用于将热量传递至温度控制层1。
[0061]
机器皮肤中导热层8为导热有机硅材料制作成,具有绝缘低阻燃和高热阻抗的功能,并且质地柔软,可压缩性好,自带微粘性。主要用于将机器人内部发热部位与温度控制层1间的热传递,同时还起到绝缘、减振、密封等作用。具体的,机器人内部结构所产生的的
热量,都会提供导热层8传递到温度控制层1中,温度控制层1可以采集温度信息并且传输到控制器6中,控制器6即可对机器皮肤的温度进行调节。
[0062]
可选的,第一疏油层2包括第一聚氯乙烯层和第一纳米二氧化硅镀层;
[0063]
第二疏油层4包括第二聚氯乙烯层和第二纳米二氧化硅镀层;
[0064]
第一纳米二氧化硅镀层和第二纳米二氧化硅镀层贴近油路层3。
[0065]
pvc,即聚氯乙烯,是氯乙烯经加成聚合反应得到的高分子材料,是聚乙烯和聚丙烯之后,第三种最广泛生产的合成塑胶聚合物。pvc为无定形结构的白色粉末,对光和热的稳定性差,无固定熔点,有较好的机械性能,有优异的介电性能。本实施例中的第一疏油层2和第二疏油层4的制作材料之一就为为软质pvc,通过添加增塑剂使其柔软和可弯曲。
[0066]
纳米二氧化硅为白色蓬松粉沫,多孔性,无毒无味无污染,耐高温。同时它具备的化学惰性以及特殊的触变性能明显改善橡胶制品的抗拉强度,抗撕裂性和耐磨性,橡胶改良后强度提高数十倍。液体系统、粘合剂、聚合物等的流变性与触变性控制、用作防沉、增稠、防流挂的助剂、hcr与rtv-2k硅酮橡胶的补强、可用来调节自由流动和作为抗结块剂来改善粉末性质等等。本实施例中,第一疏油层2和第二疏油层4的另一制作材料即为纳米二氧化硅,第一疏油层2和第二疏油层4中的聚氯乙烯表面与油路层3接触面镀上了一层纳米二氧化硅,从而获得良好的疏水性和疏油性。
[0067]
可选的,油路层3包括丁腈橡胶31、油路32、进油口33和出油口34;
[0068]
丁腈橡胶31中设置有油路32,油路32用于通过降温液;
[0069]
进油口33和出油口34分别连接液压泵7的出液口和进液口。
[0070]
丁腈橡胶31是由丁二烯和丙烯腈经乳液聚合法制得的,丁腈橡胶31主要采用低温乳液聚合法生产,耐油性极好,耐磨性较高,耐热性较好,粘接力强。其缺点是耐低温性差、耐臭氧性差,绝缘性能低劣,弹性稍低。丁腈橡胶31主要用于制造耐油橡胶制品。丁腈橡胶31简称nbr,由丁二烯与丙烯腈共聚而制得的一种合成橡胶,是耐油(尤其是烷烃油)、耐老化性能较好的合成橡胶。丁腈橡胶31中丙烯腈含量(%)有42~46、36~41、31~35、25~30、18~24等五种。其中,丙烯腈含量越多,耐油性越好,但耐寒性则相应下降。它可以在120℃的空气中或在150℃的油中长期使用。此外,它还具有良好的耐水性、气密性及优良的粘结性能。广泛用于制各种耐油橡胶制品、多种耐油垫圈、垫片、套管、软包装、软胶管、印染胶辊、电缆胶材料等,在汽车、航空、石油、复印等行业中成为必不可少的弹性材料。
[0071]
本实施例中的油路层3的制作材料之一即为丁腈橡胶31,具体为,油路层3中的油路32通过丁腈橡胶31(nbr)冲压而成,利用范德华力通过加热保压与第一疏油层2和第二疏油层4密闭贴合,并且进油口33和出油口34分别连接液压泵7的出液口和进液口,通过进出液压差使降温液运动。
[0072]
可选的,接触层5为硅橡胶或热塑性聚氨酯弹性体橡胶。
[0073]
可选的,在第二疏油层4和接触层5之间还包括同温层9,同温层9用于缓冲温度控制层1和油路层3的升温与降温速度。
[0074]
可选的,在第二疏油层4和接触层5之间依次还包括缓冲层10,缓冲层10缓冲接触层5收到的压力。
[0075]
可选的,缓冲层10为人工软骨泡沫或导热硅胶。
[0076]
缓冲层10模拟人体皮肤下层的肌肉部分,对于接触层5收到的压力进行进行缓冲,
放置机器皮肤内部损坏。
[0077]
本技术中,接触层5为直接接触外界的部分,可以接收到外界的温度和压力,缓冲层10则为机器皮肤中缓存外界压力的部分,而同温层9则为缓冲温度上升与下降的部分,模拟了人体升温降温的状态。第一疏油层2和第二疏油层4主要用于将油路层3进行隔离,防止降温液或是其他液体渗出,影响机器皮肤的。温度控制层1将温度信息进行采集,向控制器6传输,控制器6将温度信息进行分析,判断当前机器皮肤的温度是否处于设置的温度范围内。当机器皮肤的温度过低时,控制器6控制温度控制层1产生热量,使得机器皮肤温度保持恒定。当机器皮肤的温度过高时,控制液压泵7将降温液流通于油路层3,降温液会带走多余的热量,使得机器皮肤温度保持恒定,使得机器人处于安全工作温度,提高机器人的使用寿命并且导热层8会将机器人内部的热量传输至机器皮肤中,使得控制器6可以检测到机器人温度状态,并且可以针对机器人全身或是某一部分机器皮肤进行增温或散热,使得机器人处于安全工作温度,提高机器人的使用寿命。
[0078]
其次,油路层3可以根据实际情况替换成受力检测层,受力检测层主要用于分析机器皮肤的压力情况,对接触部分进行进一步的分析。
[0079]
在本技术中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅用于说明各部件或组成部分之间的相对位置关系,并不特别限定各部件或组成部分的具体安装方位。
[0080]
并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本技术中的具体含义。
[0081]
此外,术语“安装”、“设置”、“设有”、“连接”、“相连”应做广义理解。例如,可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
[0082]
此外,在本技术中所附图式所绘制的结构、比例、大小等,均仅用于配合说明书所揭示的内容,以供本领域技术人员了解与阅读,并非用于限定本技术可实施的限定条件,故不具有技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本技术所能产生的功效及所能达成的目的下,均仍应落在本技术所揭示的技术内容涵盖的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。