一种tcp网络拥塞控制方法、装置、终端及可读存储介质
技术领域
1.本发明涉及tcp网络的控制技术领域,具体涉及一种tcp网络拥塞控制方法、装置、终端及可读存储介质。
背景技术:
2.在互联网飞速发展的今天,基于传输控制协议(tcp)的数据包传输数量迅速增加,导致网络拥塞问题日益突出。网络拥塞不仅会影响网络的健康发展,同时会严重影响网络的服务质量,从而使得网络拥塞成为一个亟待解决的问题。
3.拥塞控制不仅是确保网络鲁棒性的关键性因素,也是各种管理控制机制和应用的基础。因此,tcp拥塞控制机制对控制网络拥塞具有十分重要的意义。尽管tcp协议中已经提供强大的的拥塞控制机制,但并不足以在任何情况下提供良好的服务,它仅仅依靠终端主机来执行端到端的拥塞控制,已经不能满足网络中巨大的通信量和更高的服务质量。基于路由器的主动队列管理算法(aqm)是基于端系统的tcp拥塞控制机制的补充。它是一种基于路由器的控制机制,旨在减少报文丢失,提高网络利用率。因此,将tcp和aqm的结合是解决目前tcp网络拥塞控制的有效途径。但是,tcp网络具有时变和强非线性等特点,经常受到一些突发流的影响,产生不可避免的干扰,这些都是控制网络拥塞中需要面对的难题。
技术实现要素:
4.本发明的目的在于提供一种tcp网络拥塞控制方法、装置、终端及可读存储介质。
5.为实现上述目的,一方面,本发明提出了一种tcp网络拥塞控制方法,包括:
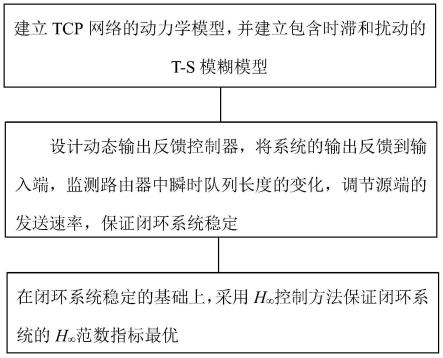
6.1)建立含扰动的tcp网络动力学模型,并采用线性化方法得到含有时滞和扰动的t-s模糊模型;
7.2)设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;
8.3)在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优;
9.其中,步骤1中,建立tcp网络动力学模型:
[0010][0011]
其中,w(t)是tcp窗口大小,q(t)是路由器中的瞬时队列长度,r(t)是往返时间,并且r(t)=t
p
q(t)/c(t),t
p
是传播时延,p(t)是数据传输过程中丢包率,满足0≤p(t)≤1,c(t)是链路容量,n(t)是tcp的连接数,
[0012]
基于线性化方法得到t-s模糊模型:
[0013]
[0014][0015][0016]
其中,x(t)是系统的状态,是tcp网络系统中的预期的队列长度与瞬时队列长度的差值,u(t)是控制输入,是tcp网络中的丢包率,ω(t)是系统中存在集总干扰,τ(t)是系统中的时滞,y(t)是测量输出,z(t)是控制输出,hi(x(t))是隶属度函数并且满足(x(t))是隶属度函数并且满足μi(x(t))为x(t)属于mi(t)的程度,μi(x(t))≥0,所以0≤hi(x(t))≤1,ai、bi、ci、di、a
di
、mi和ni为已知的适当维数的矩阵。
[0017]
其中,步骤2中,动态输出反馈控制器由t-s模糊模型描述为:
[0018][0019][0020]
其中,是控制器的状态,y(t)是测量输出,u(t)是控制输入,a
ci
、b
ci
、c
ci
、d
ci
是控制器增益矩阵。
[0021]
其中,闭环系统表示为:
[0022][0023][0024]
其中,m0=[m
i 0],0],
[0025]
具体的,闭环系统满足下列条件:
[0026]
(1)当扰动ω≡0时,闭环系统是指数稳定的;
[0027]
(2)当扰动ω≠0时,在零初始条件下,存在常值标量r>0,α>0,使得不等式成立。
[0028]
一种tcp网络拥塞控制装置,包括:
[0029]
获取模块,通过建立含扰动的tcp网络动力学模型,并采用线性化方法得到含有时滞和扰动的t-s模糊模型;
[0030]
调节模块,通过设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;
[0031]
控制模块,用于在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优。
[0032]
一种终端,所述终端包括:处理器、存储器及通信总线;
[0033]
所述存储器上存储有能在所述处理器上运行的计算机程序;
[0034]
所述通信总线用于实现处理器和存储器之间的连接通信;
[0035]
所述处理器用于执行存储器中存储的一个或多个计算机程序,以实现上述tcp网络拥塞控制方法的步骤。
[0036]
一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序可被处理器执行,以实现上述tcp网络拥塞控制方法的步骤。
[0037]
与现有技术相比,本发明具有如下有益效果:本发明包括采用一组t-s模糊模型方法将tcp网络非线性系统建模为包含时滞和扰动的t-s模糊系统;设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优。本发明针对包含时滞和扰动的tcp网络系统,提供一种基于t-s模糊模型和h
∞
性能的动态输出反馈主动队列管理算法,提高系统抑制干扰的能力,有效控制tcp网络拥塞,改善tcp网络性能,提高网络服务质量,适用于tcp网络拥塞控制。
附图说明:
[0038]
图1为本发明方法的流程示意图。
具体实施方式:
[0039]
下面对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
[0040]
除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
[0041]
如图1所示,本发明所揭示的一种tcp网络拥塞控制方法,包括以下步骤:
[0042]
步骤1,建立含扰动的tcp网络动力学模型,并采用线性化方法得到含有时滞和扰动的t-s模糊模型。
[0043]
具体地,在该步骤中,动力学模型具体为:
[0044][0045]
其中,w(t)是tcp窗口大小,q(t)是路由器中的瞬时队列长度,r(t)是往返时间,并且r(t)=t
p
q(t)/c(t),t
p
是传播时延,p(t)是数据传输过程中丢包率,满足0≤p(t)≤1,c(t)是链路容量,n(t)是tcp的连接数。
[0046]
本实施例中,tcp的网络连接数n取100个,链路容量c为105packets/s,往返时延r为90ms,路由器的最大缓冲量为500packets,期望的队列长度为100packets,初始队列长度为0packets。
[0047]
上述系统第i条模糊规则描述为:
[0048]
规则i:如果x1(t)是x2(t)是
…
,xn(t)是那么,
[0049][0050]
y(t)=cix(t)
[0051]
z(t)=mix(t) niω(t)
[0052]
其中,x(t)是系统的状态,是tcp网络系统中的预期的队列长度与瞬时队列长度的差值,u(t)是控制输入,是tcp网络中的丢包率,ω(t)是系统中存在集总干扰,τ(t)是系统中的时滞,y(t)是测量输出,z(t)是控制输出,常数矩阵ai、bi、ci、di、a
di
是已知的,x(t)=[x1(t),...,x
l
(t)]是状态变量,是模糊子集,l是规则数目。
[0053]
基于t-s模糊模型,tcp网络系统可以被描述为
[0054][0055][0056][0057]
其中,hi(x(t))是隶属度函数并且满足(x(t))是隶属度函数并且满足μi(x(t))为x(t)属于mi(t)的程度,μi(x(t))≥0,所以0≤hi(x(t))≤1,规则数目l取2条,系统矩阵ai、bi、ci、di、a
di
、mi和ni分别为:
[0058]
c1=[0 1],c2=[0 1],m1=[0.2 0.7],m1=[2 0.01],n1=0.01,n2=0.01。
[0059]
相应的隶属度函数被选择为:
[0060][0061]
步骤2,设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定。
[0062]
具体地,模糊动态输出反馈控制器的第i条规则表示为:
[0063]
控制器规则i:如果x1(t)是x2(t)是
…
,xn(t)是那么,
[0064][0065][0066]
则总体的动态输出反馈控制器的t-s模糊模型表示为:
[0067]
[0068][0069]
其中,是控制器的状态,y(t)是测量输出,u(t)是控制输入,a
ci
、b
ci
、c
ci
、d
ci
是控制器增益矩阵。
[0070]
闭环系统表示为:
[0071][0072][0073]
其中,m0=[m
i 0],0],
[0074]
步骤3,在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优。
[0075]h∞
指数稳定条件描述为闭环系统满足下列条件:
[0076]
(1)当扰动ω≡0时,闭环系统是指数稳定的;
[0077]
(2)当扰动ω≠0时,在零初始条件下,存在常值标量r>0,α>0,使得不等式成立。
[0078]
其中,α=3,r=8。
[0079]
一种tcp网络拥塞控制装置,包括:
[0080]
获取模块,通过建立含扰动的tcp网络动力学模型,并采用线性化方法得到含有时滞和扰动的t-s模糊模型;
[0081]
调节模块,通过设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;
[0082]
控制模块,用于在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优。
[0083]
一种终端,所述终端包括:处理器、存储器及通信总线;
[0084]
所述存储器上存储有能在所述处理器上运行的计算机程序;
[0085]
所述通信总线用于实现处理器和存储器之间的连接通信;
[0086]
所述处理器用于执行存储器中存储的一个或多个计算机程序,以实现上述tcp网络拥塞控制方法的步骤。
[0087]
一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序可被处理器执行,以实现上述tcp网络拥塞控制方法的步骤。
[0088]
本发明的优点在于,本发明包括采用一组t-s模糊模型方法将tcp网络非线性系统建模为包含时滞和扰动的t-s模糊系统;设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优。本发明针对包含
时滞和扰动的tcp网络系统,提供一种基于t-s模糊模型和h
∞
性能的动态输出反馈主动队列管理算法,提高系统抑制干扰的能力,有效控制tcp网络拥塞,改善tcp网络性能,提高网络服务质量,适用于tcp网络拥塞控制。
[0089]
需要说明的是,本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
[0090]
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。