技术特征:
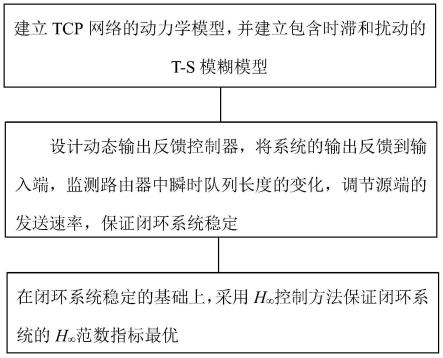
1.一种tcp网络拥塞控制方法,其特征在于,包括:1)建立含扰动的tcp网络动力学模型,并采用线性化方法得到含有时滞和扰动的t-s模糊模型;2)设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;3)在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优;其中,步骤1中,建立tcp网络动力学模型:其中,w(t)是tcp窗口大小,q(t)是路由器中的瞬时队列长度,r(t)是往返时间,并且r(t)=t
p
q(t)/c(t),t
p
是传播时延,p(t)是数据传输过程中丢包率,满足0≤p(t)≤1,c(t)是链路容量,n(t)是tcp的连接数,基于线性化方法得到t-s模糊模型:s模糊模型:s模糊模型:其中,x(t)是系统的状态,是tcp网络系统中的预期的队列长度与瞬时队列长度的差值,u(t)是控制输入,是tcp网络中的丢包率,ω(t)是系统中存在集总干扰,τ(t)是系统中的时滞,y(t)是测量输出,z(t)是控制输出,h
i
(x(t))是隶属度函数并且满足μ
i
(x(t))为x(t)属于m
i
(t)的程度,μ
i
(x(t))≥0,所以0≤h
i
(x(t))≤1,a
i
、b
i
、c
i
、d
i
、a
di
、m
i
和n
i
已知的适当维数的矩阵。2.如权利要求1所述的一种tcp网络拥塞控制方法,步骤2中,动态输出反馈控制器由t-s模糊模型描述为:s模糊模型描述为:其中,是控制器的状态,y(t)是测量输出,u(t)是控制输入,a
ci
、b
ci
、c
ci
、d
ci
是控制器增益矩阵。3.如权利要求1所述的一种tcp网络拥塞控制方法,其特征在于,闭环系统表示为:
其中,m0=[m
i 0],0],4.如权利要求1所述的一种tcp网络拥塞控制方法,其特征在于,闭环系统满足下列条件:(1)当扰动ω≡0时,闭环系统是指数稳定的;(2)当扰动ω≠0时,在零初始条件下,存在常值标量r>0,α>0,使得不等式成立。5.一种tcp网络拥塞控制装置,其特征在于,包括:获取模块,通过建立含扰动的tcp网络动力学模型,并采用线性化方法得到含有时滞和扰动的t-s模糊模型;调节模块,通过设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;控制模块,用于在闭环系统稳定的基础上,采用h
∞
控制方法保证闭环系统的h
∞
范数指标最优。6.一种终端,其特征在于,所述终端包括:处理器、存储器及通信总线;所述存储器上存储有能在所述处理器上运行的计算机程序;所述通信总线用于实现处理器和存储器之间的连接通信;所述处理器用于执行存储器中存储的一个或多个计算机程序,以实现如权利要求1-4中任一项所述的tcp网络拥塞控制方法的步骤。7.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序可被处理器执行,以实现如权利要求1-4中任一项所述的tcp网络拥塞控制方法的步骤。
技术总结
本发明公开了一种TCP网络拥塞控制方法,包括采用一组T-S模糊模型方法将TCP网络非线性系统建模为包含时滞和扰动的T-S模糊系统;设计动态输出反馈控制器,将系统的输出反馈到输入端,监测路由器中瞬时队列长度的变化,调节源端的发送速率,保证闭环系统稳定;在闭环系统稳定的基础上,采用H
技术研发人员:侯林林 马鹏飞 孙海滨 罗文德 杨东
受保护的技术使用者:曲阜师范大学
技术研发日:2022.04.25
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。