1.本发明属于汽车零件清洗技术领域,涉及一种发动机连杆激光超声波复合清洗装置及方法。
背景技术:
2.连杆作为汽车发动机的重要零部件,工作中承受着很高的周期性载荷,其受力非常复杂,因此对连杆的装配要求很高。发动机连杆在进行一系列的机加工过程中,工件表面及缝隙处留有大量的残余金属碎屑、防锈油污垢及纤维颗粒。如果连杆清洗不达标,不仅容易划伤连杆精度要求极高的大小头孔内表面,还会阻碍连杆工作时的热量传递,严重影响连杆与发动机及曲轴装配后的工作性能。
3.激光清洗是目前较为成熟的一种清洗方式,具有高效、精确、环保的特点,在除锈、金属着色等领域有应用。其原理是利用高能激光经过透镜聚焦后在焦点上达到很高的能量密度,照射在清洗件表面,聚焦激光在焦点附近通过热辐射和热传导产生的上千度高温,在清洗件表面产生振动、热膨胀、熔化和汽化等一系列复杂的物理化学变化来去除附着在清洗件表面的杂质。
4.超声波清洗技术是利用超声波在液体中的空化作用、加速作用及直进流作用,使污物层被分散、乳化、剥离而达到清洗目的。超声波由于频率高、波长短,因而传播的方向性好、穿透能力强,因此清洗速度快,清洗效果好。同时它节省溶剂、热能、工作场地和人工,也无需人手接触清洗液,绿色安全。
技术实现要素:
5.针对上述现有技术中存在的问题,本发明公布了一种发动机连杆激光超声波复合清洗装置及方法,该装置利用激光清洗技术和超声波清洗技术,共同对发动机连杆进行清洗,实现连杆小端头通孔与衬套夹层缝隙的高效清洗动作,解决连杆小头孔与衬套夹层缝隙的毛刺和夹杂的杂质难以清洗的行业难题,同时完成整条连杆全方位全覆盖的总成清洗,达到高效、环保的清洗。
6.本发明具体公开一种发动机连杆激光超声波复合清洗装置,其包括激光清洗机构和超声清洗机构。
7.其中所述激光清洗机构包括多工位旋转圆盘单元、上料机械手、第一激光清洗单元、转换机械手以及第二激光清洗单元,所述多工位旋转圆盘单元包括至少四个工位,所述上料机械手、第一激光清洗单元、转换机械手、第二激光清洗单元分别设置于多工位旋转圆盘单元的边缘侧方;所述上料机械手、第一激光清洗单元、转换机械手、第二激光清洗单元分别对应多工位旋转圆盘单元的一个工位,且所述转换机械手位于第一激光清洗单元与第二激光清洗单元的中间位置。
8.所述超声清洗机构包括传送带单元、上料仓、超声波清洗仓、热风烘干仓、下料仓以及下料机械手,所述上料仓、超声波清洗仓、热风烘干仓、下料仓顺次排列,所述传送带单
元顺次连通上料仓、超声波清洗仓、热风烘干仓以及下料仓;所述下料机械手设置于下料仓一侧。
9.进一步的,所述多工位旋转圆盘单元包括包括旋转圆盘以及旋转支撑台,所述旋转圆盘位于旋转支撑台上方,且所述旋转圆盘与旋转支撑台的连接位置设有用于驱动旋转圆盘运动的驱动单元;所述工位等间隔环绕设置于旋转圆盘上表面,每个工位设有连杆固定夹具,所述发动机连杆通过连杆固定夹具夹紧于所述工位上。
10.进一步的,所述旋转圆盘中每一个工位上在对应发动机连杆下方位置均设有出料口,所述出料口上设有移动开合结构,所述移动开合结构用于控制发动机连杆从旋转圆盘落下。
11.进一步的,所述上料机械手与下料机械手均包括连杆抓取夹具、第一移动臂、第二移动臂以及固定底座,所述固定底座上设有旋转构件,所述第一移动臂的一端与旋转构件铰接,所述第一移动臂与固定底座铰接位置设有第一活动构件;所述第一移动臂的另一端与第二移动臂的端部铰接,所述第一移动臂与第二移动臂铰接位置设有第二活动构件;所述连杆抓取夹具与第二移动臂中远离第一移动臂的一端铰接,且所述连杆抓取夹具与第二移动臂铰接位置设有第三活动构件。
12.进一步的,所述转换机械手包括连杆夹取装置、水平x轴移动臂、竖向支撑臂以及安装底座,所述竖向支撑臂下部与安装底座连接,所述水平x轴移动臂与竖向支撑臂上端滑动连接,所述水平x轴移动臂带动连杆夹取装置进行左右移动;所述连杆夹取装置设置于水平x轴移动臂的端部位置,且所述连杆夹取装置与水平x轴移动臂连接位置设有的夹具驱动构件。
13.进一步的,所述第一激光清洗单元和第二激光清洗单元均包括激光清洗头、水平x轴移动端、竖向连接臂以及激光清洗底座,其中所述竖向连接臂下部与激光清洗底座滑动连接,所述水平x轴移动端与竖向连接部上端滑动连接,且所述竖向连接臂的滑动方向与水平x轴移动端的滑动方向保持垂直;所述激光清洗头设置于水平x轴移动端的端部位置;所述水平x轴移动端带动激光清洗头进行左右移动,所述竖向连接臂带动水平x轴移动端和激光清洗头共同进行前后移动。
14.进一步的,所述第一激光清洗单元和第二激光清洗单元均设有光路结构,所述光路结构包括控制面板、yag激光器、扩束准直镜、反射镜、第一激光振镜单元、第二激光振镜单元、平场聚焦镜、聚焦镜以及激光清洗头,所述控制面板和yag激光器采用电连接,所述控制面板用于控制yag激光器所发射激光的功率;所述yag激光器射出的激光经过扩束准直镜,所述激光准直镜用于扩大激光束腰半径,减少发射角以及过滤噪声光波,以获得优质波长的红外光;激光经由反射镜改变光路方向,使激光射向第一激光振镜单元,第一激光振镜单元改变激光的光路方向,使激光射向第二激光振镜单元;然后激光经由平场聚焦镜、聚焦镜,从激光清洗头射出。
15.进一步的,所述第一激光振镜单元和第二激光振镜单元均包括驱动电机和振镜,所述驱动电机的连接轴与振镜固定,通过驱动电机旋转改变振镜的平面方向;所述第一激光振镜单元中振镜的旋转轴线和第二激光振镜单元中振镜的旋转轴线垂直。
16.根据上述发动机连杆激光超声波复合清洗装置,本发明进一步公开了一种发动机连杆激光超声波复合清洗方法,其包括如下步骤:
17.s1.上料机械手将发动机连杆放置于多工位旋转圆盘单元中的第一工位上,连杆固定夹具将发动机连杆夹紧固定,多工位旋转圆盘单元中的旋转圆盘旋转将发动机栏杆送至第二工位;
18.s2.发动机连杆到达第二工位后,第一激光清洗单元对发动机连杆的小端头通孔与衬套夹层缝隙进行清洗,清洗完成后,旋转圆盘将发动机连杆送入第三工位;
19.s3.发动机连杆到达第三工位后,连杆固定夹具首先松开发动机连杆,转换机械手将发动机连杆夹起并旋转180
°
后放置于第三工位,连杆固定夹具将发动机连杆重新夹紧固定;
20.s4.旋转圆盘继续旋转将发动机连杆送入第四工位,第二激光清洗单元对发动机连杆的小端头通孔与衬套夹层缝隙进行清洗,清洗完成后,连杆固定夹具松开,第四工位上的移动开合结构打开,使得发动机连杆由多工位旋转圆盘单元落入超声清洗机构的传送带上;
21.s5.传送带携带发动机连杆依次经过上料仓、超声波清洗仓、热风烘干仓、下料仓,经过超声波清洗仓全面清洗以及热风烘干仓进行烘干后,发动机连杆由下料机械手取出。
22.进一步的,所述第一激光清洗单元及第二激光清洗单元对发动机连杆的小端头通孔与衬套夹层缝隙进行清洗过程中,采用第一激光振镜单元和第二激光振镜单元对激光清洗线路进行控制:
23.第一激光振镜单元中驱动电机驱动振镜绕x轴旋转,第二激光振镜单元中驱动电机驱动振镜绕y轴旋转,通过控制第一激光振镜单元和第二激光振镜单元中驱动电机的脉冲频率控制振镜的旋转角度,通过第一激光振镜单元和第二激光振镜单元共同控制激光焦点沿发动机连杆小端头通孔与衬套夹层的缝隙进行圆周运动。
24.与现有技术相比,本发明产生的有益技术效果为:
25.1)本发明的目的是利用激光清洗技术和超声波清洗技术,共同对发动机连杆进行清洗,特别是连杆体表面、连杆大小端头通孔和小端头通孔衬套夹层中的缝隙等难以清洗部位进行高效清洗。本发明充分发挥利用激光清洗和超声波清洗的技术特点,复合两种清洗技术,连杆首先通过激光清洗,即通过激光器发出一定功率的高能激光,高能激光束作用在连杆小端头通孔与衬套夹层缝隙,通过激光头的移动使得连杆小端头通孔与衬套夹层缝隙的毛刺和夹杂的杂质得到激光烧灼清洗,实现连杆小端头通孔与衬套夹层缝隙的高效清洗动作,进而解决连杆小头孔与衬套夹层缝隙的毛刺和夹杂的杂质难以清洗的行业难题。然后再通过超声波清洗方式,对连杆全表面进行超声波冲击清洗,进而完成整条连杆全方位全覆盖的总成清洗,达到高效、环保的清洗。
26.2)本发明采用四工位旋转圆盘进行自动激光清洗,有效解决连杆小端头通孔与衬套夹层缝隙的毛刺和夹杂的杂质难题,并实现无人操作,显著提高企业生产效益;同时通过机械手可实现发动机连杆上下表面自动翻转清洗,且通过激光清洗单元自主控制激光头的扫描速度和光斑搭接率,可全覆盖连杆小端头通孔与衬套夹层缝隙清洗。
附图说明
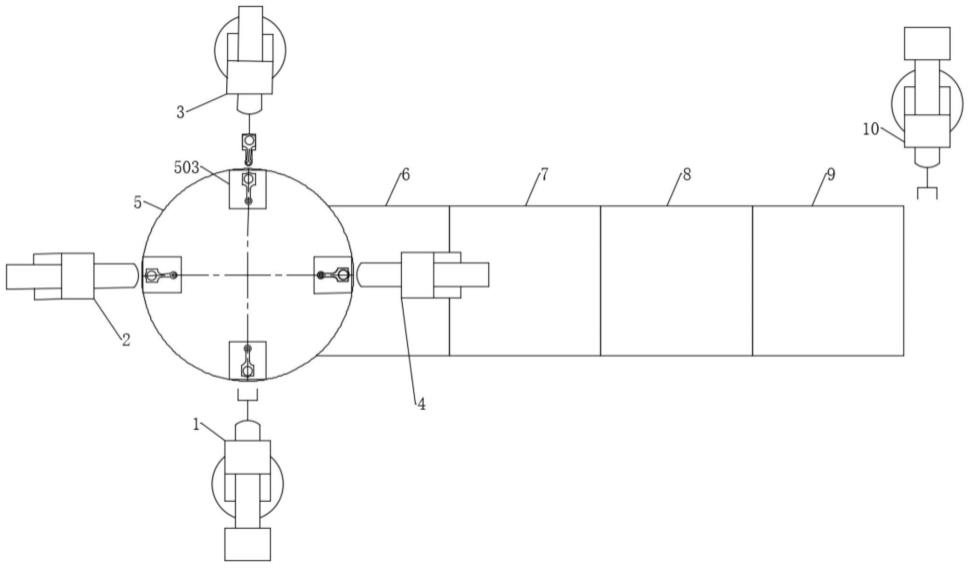
27.图1为本实施例1中一种发动机连杆激光超声波复合清洗装置的结构示意图;
28.图2为本实施例1中超声清洗机构的结构示意图;
29.图3为本实施例1中上料机械手的结构示意图;
30.图4为本实施例1中激光清洗单元的结构示意图;
31.图5为本实施例1中激光清洗单元的光路结构示意图;
32.图6为本实施例1中转换机械手的结构示意图;
33.图7为本实施例1激光清洗单元中光路机构的振镜结构示意图。
具体实施方式
34.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
35.因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
36.实施例1:
37.结合图1所示,本实施例中公开了一种发动机连杆激光超声波复合清洗装置,其包括激光清洗机构和超声清洗机构。
38.其中所述激光清洗机构包括多工位旋转圆盘单元5、上料机械手1、第一激光清洗单元2、转换机械手3以及第二激光清洗单元4,所述多工位旋转圆盘单元5包括至少四个工位,所述上料机械手1、第一激光清洗单元2、转换机械手3、第二激光清洗单元4分别设置于多工位旋转圆盘单元5的边缘侧方;所述上料机械手1、第一激光清洗单元2、转换机械手3、第二激光清洗单元4分别对应多工位旋转圆盘单元5的一个工位,且所述转换机械手3位于第一激光清洗单元2与第二激光清洗单元4的中间位置。
39.其中所述多工位旋转圆盘单元5包括包括旋转圆盘501以及旋转支撑台502,所述旋转圆盘501位于旋转支撑台502上方,且所述旋转圆盘501与旋转支撑台502的连接位置设有用于驱动旋转圆盘501运动的驱动单元,例如旋转电机;所述工位等间隔环绕设置于旋转圆盘501上表面,每个工位设有连杆固定夹具,所述发动机连杆通过连杆固定夹具夹紧于所述工位上。进一步的,所述旋转圆盘501中每一个工位上在对应发动机连杆下方位置均设有出料口,所述出料口上设有移动开合结构503,所述移动开合结构503用于控制发动机连杆从旋转圆盘501落下。本实施例中通过多工位旋转圆盘501进行自动激光清洗,有效解决连杆小头孔与衬套夹层缝隙的毛刺和夹杂的杂质难题,通过多工位旋转圆盘501结合转换机械手3,可对发动机连杆的两侧面自动翻转清洗,提高清洗效率,减少人工成本。
40.结合附图2所示,所述超声清洗机构包括传送带单元11、上料仓12、超声波清洗仓7、热风烘干仓8、下料仓9以及下料机械手10,所述上料仓12、超声波清洗仓7、热风烘干仓8、下料仓9顺次排列,所述传送带单元11顺次连通上料仓12、超声波清洗仓7、热风烘干仓8以及下料仓9;所述下料机械手10设置于下料仓9一侧。
41.进一步的,如附图3所示,所述上料机械手1与下料机械手10均包括连杆抓取夹具
104、第一移动臂102、第二移动臂103以及固定底座101,所述固定底座101上设有旋转构件,所述第一移动臂102的一端与旋转构件铰接,所述第一移动臂102与固定底座101铰接位置设有第一活动构件105;所述第一移动臂102的另一端与第二移动臂103的端部铰接,所述第一移动臂102与第二移动臂103铰接位置设有第二活动构件106;所述连杆抓取夹具104与第二移动臂103中远离第一移动臂102的一端铰接,且所述连杆抓取夹具104与第二移动臂103铰接位置设有第三活动构件107。通过上下料机械手10实现发动机连杆的自动抓取,免除人工操作。上下料机械手10在进行抓取时针对不同类型、不同尺寸的连杆,可适应性更换连杆抓取夹具104,利用第一移动臂102、第二移动臂103共同活动,可实现任意位置的发动机连杆抓取功能。需说明的是本实施例中所采用的旋转构件可采用旋转电机,第一活动构件105、第二活动构件106、第三活动构件107可分别采用同步电机、旋转气缸、伺服电机等。
42.进一步的,结合图6所示,所述转换机械手3包括连杆夹取装置304、水平x轴移动臂303、竖向支撑臂302以及安装底座301,所述竖向支撑臂302下部与安装底座301连接,所述水平x轴移动臂303与竖向支撑臂302上端滑动连接,例如所述水平x轴移动臂303与竖向支撑臂302上端可采用直线滑轨滑槽结构、齿条齿轮结构等,所述水平x轴移动臂303带动连杆夹取装置进行左右移动;所述连杆夹取装置304设置于水平x轴移动臂303的端部位置,且所述连杆夹取装置304与水平x轴移动臂303连接位置设有的夹具驱动构件。
43.此外本实施例中所述第一激光清洗单元2和第二激光清洗单元4均包括激光清洗头204、水平x轴移动端203、竖向连接臂202以及激光清洗底座201,如图4所示,其中所述竖向连接臂202下部与激光清洗底座201滑动连接,所述水平x轴移动端203与竖向连接部上端滑动连接,且所述竖向连接臂202的滑动方向与水平x轴移动端203的滑动方向保持垂直;所述激光清洗头204设置于水平x轴移动端203的端部位置;所述水平x轴移动端203带动激光清洗头204进行左右移动,所述竖向连接臂202带动水平x轴移动端203和激光清洗头204共同进行前后移动。该结构通过利用竖向连接臂202及水平x轴移动端203的滑动结构,使得激光清洗头204可保持在一定高度上进行平面移动,进而实现激光清洗头204进行圆周运动,实现对发动机连杆小端头通孔与衬套夹层缝隙的圆周清洗。
44.可替代的,除了采用上述激光清洗单元结构外,本实施还可采用以下结构:结合图5所示,所述第一激光清洗单元2和第二激光清洗单元4均设有光路结构,所述光路结构包括控制面板205、yag激光器206、扩束准直镜207、反射镜208、第一激光振镜单元209、第二激光振镜单元210、平场聚焦镜211、聚焦镜212以及激光清洗头204,所述控制面板205和yag激光器206采用电连接,所述控制面板205用于控制yag激光器206所发射激光的功率;所述yag激光器206射出的激光经过扩束准直镜207,所述激光准直镜用于扩大激光束腰半径,减少发射角以及过滤噪声光波,以获得优质波长的红外光;激光经由反射镜208改变光路方向,使激光射向第一激光振镜单元209,第一激光振镜单元209改变激光的光路方向,使激光射向第二激光振镜单元210;然后激光经由平场聚焦镜211、聚焦镜212,从激光清洗头204射出。进一步的,如图7所示,所述第一激光振镜单元209包括驱动电机2091和振镜2092,第二激光振镜单元210包括包括驱动电机2101和振镜2102,所述驱动电机的连接轴与振镜固定,通过驱动电机旋转改变振镜的平面方向;所述第一激光振镜单元209中振镜2092的旋转轴线和第二激光振镜单元210中振镜2102的旋转轴线垂直。本实施例中采用两个不同旋转方向的振镜改变激光路线,通过驱动电机脉冲信号控制,可利用两个振镜共同实现激光沿发动机
连杆小端头通孔与衬套夹层缝隙进行圆周运动。
45.实施例2:
46.:本实施例2公开了一种发动机连杆激光超声波复合清洗方法,其包括如下步骤:
47.s1.上料机械手1将发动机连杆放置于多工位旋转圆盘单元5中的第一工位上,连杆固定夹具将发动机连杆夹紧固定,多工位旋转圆盘单元5中的旋转圆盘501旋转将发动机栏杆送至第二工位;
48.s2.发动机连杆到达第二工位后,第一激光清洗单元2对发动机连杆的小端头通孔与衬套夹层缝隙进行清洗,清洗完成后,旋转圆盘501将发动机连杆送入第三工位;
49.s3.发动机连杆到达第三工位后,连杆固定夹具首先松开发动机连杆,转换机械手3将发动机连杆夹起并旋转180
°
后放置于第三工位,连杆固定夹具将发动机连杆重新夹紧固定;
50.s4.旋转圆盘501继续旋转将发动机连杆送入第四工位,第二激光清洗单元4对发动机连杆的小端头通孔与衬套夹层缝隙进行清洗,清洗完成后,连杆固定夹具松开,第四工位上的移动开合结构503打开,使得发动机连杆由多工位旋转圆盘单元5落入超声清洗机构的传送带上;
51.s5.传送带携带发动机连杆依次经过上料仓12、超声波清洗仓7、热风烘干仓8、下料仓9,经过超声波清洗仓7全面清洗以及热风烘干仓8进行烘干后,发动机连杆由下料机械手10取出。
52.本实施例中发动机连杆在清洗过程中首先利用激光清洗难以去除的杂质缝隙,同时激光清洗也会对发动机连杆表面具有强化作用,再利用超声波清洗方式对发动机连杆进行全面清洗,连杆清洗清洁度更高,效果更好。
53.进一步的,所述第一激光清洗单元2及第二激光清洗单元4对发动机连杆的小端头通孔与衬套夹层缝隙进行清洗过程中,采用第一激光振镜单元209和第二激光振镜单元210对激光清洗线路进行控制:
54.第一激光振镜单元209中驱动电机2091驱动振镜2092绕x轴旋转,第二激光振镜单元210中驱动电机2101驱动振镜2102绕y轴旋转,通过控制第一激光振镜单元209和第二激光振镜单元210中驱动电机的脉冲频率控制振镜的旋转角度,通过第一激光振镜单元209和第二激光振镜单元210共同控制激光焦点沿发动机连杆小端头通孔与衬套夹层的缝隙进行圆周运动。
55.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。