1.本发明涉及光谱仪的光学系统和包括这种光学系统的光谱仪设备。
背景技术:
2.光谱仪(spectrometer)的光学系统是用于测量电磁光谱的特定部分上的光的特性的部件。光学系统是光谱仪设备的一部分,用于通过电弧或火花激发、libs、icp、或辉光放电激发等产生谱线。测量这些谱线的波长和强度以识别材料或分析它们的化学组成。这种光谱仪设备可以在从深uv到远红外的宽波长范围内工作。
3.光谱仪设备需要用于样品的光谱分析的激发发生器,其提供产生等离子体的样品的部分的蒸发和电离所需的激发能量、分离由该等离子体发射的谱线的波长的光学系统、可测量这些谱线的强度的检测器或检测器装置、记录测量值并控制光谱仪设备的功能的读出和控制系统、以及具有软件的计算机,软件用于将所获得的测量值方便地转换为样品的各个组分的含量。现代光谱仪几乎专门使用衍射光栅进行光谱色散。如果光栅表面是非平面的,则那些光栅具有成像能力。光栅凹槽的形状和间隔影响这些成像特性。当在所谓的帕邢-龙格(paschen-runge)安装或设置中设置光学系统时,光栅是罗兰(rowland)光栅,其基底是具有曲率半径r的凹球面。凹槽的形状和间隔是这样的:所得到的聚焦曲线(=在光栅的偏转平面(plane of dispersion)中的曲线,其中发生入射孔径的尖锐图像)是直径为r的的圆,称为罗兰圆。光学系统的所有部件如光栅、入射孔径、和探测器位于罗兰圆上。从光栅的曲率中心到光栅表面上的凹槽图案的对称中心(其理想地与光栅的几何中心一致)的半径被称为光栅法线。这是用于光栅方程的参考线,所有的角度都是根据它来测量的。在帕邢-龙格安装中,聚焦曲线(圆)关于该法线对称。
4.光栅衬底可以是非球形的,并且沟槽的间隔和形状可以不同于罗兰型,从而导致非圆形聚焦曲线围绕法线是非对称的。这可以是所谓的平场光栅的情况,平场光栅具有优化的焦点曲线,以便在一定的衍射角下使用空间分辨的线性(阵列)检测器。本发明也可应用于这些系统中的一些,并且不限于单独的帕邢-龙格安装。
5.使用诸如ccd传感器或cmos传感器的具有《1mm的像素高度的线检测器的光学系统将受益于垂直聚焦元件,例如,杆(rod)透镜,圆柱形透镜,圆柱形反射镜或非球面反射镜或透镜,用于从与偏转平面垂直的几毫米的高度压缩待检测的谱线,以理想地使用检测器的像素高度。否则,来自弱线的信号可能由于差的(光)强度水平而未被检测到。对于大焦距的光学系统尤其如此。这种纯垂直聚焦必须在检测器处发生,并且由于光栅的成像特性,例如在入射狭缝处不能共同完成。通常有利的是将垂直光聚焦和在偏离偏转平面组合,以减小光学系统的整体尺寸,并为检测器创建必要的安装空间。
6.多年来,已经描述了几种解决在检测器处的垂直聚焦和偏离偏转平面的问题的解决方案,并且现有技术被几个专利所覆盖:
7.在de19853754b4和us6,614,528b1中,垂直聚焦和偏离偏转平面是通过圆柱形反射镜实现的。这些反射镜的纵轴沿着一个多边形图安装在偏转平面中,多边形图的每一部
分与光学系统的实际焦点曲线的专用局部切线平行并偏移。这里,曲率半径ρ
cyl
对于所有的圆柱形反射镜都相等。在局部切线和多边形图的对应部分之间的偏移或距离d在整个波长范围或焦点曲线上是恒定的,并且由普遍有效的等式确定(1)
8.其中,是偏离偏转平面的角度。为了防止在检测器单元(这里每一个都包括垂直聚焦的圆柱形镜元件、指定的检测器、和安装板或基板)的组装过程中损坏反射镜边缘,相邻反射镜之间的间隙是必需的。为了在光学系统内为检测器本身创建必要的空间,其外壳延伸得比它们的光敏或接收区域更远,为圆柱形反射镜选择的偏离偏转平面的标准化角度,使得检测器位于与偏转平面平行且等距离(距离=d)的两个平面上。由此,这些安装平面中的一个被布置在分散平面上方,而另一个被布置在分散平面下方。圆柱形反射镜的长度适于所使用的指定检测器的接收区域的长度。通常,反射镜的长度将稍微小于所指定的检测器的接收区域的长度,以保证放置容差。由于视角的增加,随着衍射角的增加,反射镜形状必须变得越来越梯形,以确保入射的光谱线完全落在反射镜表面上(或落在相邻反射镜之间的间隙中)。而且,随着衍射角的增加,镜面中心点和检测器中心点沿着多边形图的部分变得彼此相对偏移更大。由于光谱线还没有聚焦在远离焦点曲线的位置,入射在圆柱形反射镜表面上的光谱线将在一个区域上水平地延伸,该区域比它们在检测器的照明区域上的预期fwhm宽得多。镜面上的该区域的宽度将取决于根据公式(1)计算的圆柱形反射镜的纵轴与焦点曲线的相应局部切线之间的距离d。在反射镜的边缘处,光谱线的光将仅部分地入射该反射镜,因此只有一小部分它将到达所指定的检测器。因此,在空间漂移发生的情况下,其强度将改变。因此,这种线必须被认为是不可靠的,并且不应当被用于样本的光谱评估。因此,在该系统中,部分或完全落入反射镜之间的间隙中的光谱线会丢失。
9.在fr2953017b1中,具有不同曲率半径ρ
cyl1
和ρ
cyl2
的两排圆柱形反射镜被用于垂直聚焦和偏转出偏转平面。根据等式(1)这两排圆柱形反射镜彼此偏移并与焦点曲线偏移,并且选择偏离偏转平面90
°
的一个标准偏转角如所述专利说明书中所示,属于一排的那些圆柱形反射镜的中心点可以被认为是位于所谓的叶曲线(folium curve)上。然而,这只是因为它们的纵轴仍然安装在前段所述的沿各自多边形图形的散射平面内的事实。这意味着在这种设置中,每排圆柱形反射镜以与de19853754b4和us6614528b1中完全相同的方式安装,不同之处在于仅在一个方向上发生偏转。在这种设置中,反射镜边缘不能碰撞,因为覆盖光谱的相邻部分的反射镜位于不同的行。为了还确保在光学系统的“第三维度”(即,偏转方向)中的无碰撞设置,曲率半径以这样的方式选择,即,前排镜的所指定的检测器的安装平面(即,在靠近光栅的行的反射镜)位于远高于后排镜的所指定的检测器的安装平面。在这个示例中,被选择来避免反射镜边缘和检测器支架之间的碰撞的曲率半径是27.5mm和75mm。由于来自行1和行2的反射镜分别从焦点曲线偏移距离d1和d2,因此光谱线再次没有聚焦在那些柱面反射镜的表面上。因此,在特定宽度的区域中的前排镜的边缘周围,谱线可能部分地落在一个反射镜上,部分地落在另一个反射镜上,因此将被两个检测器同时检测,或者它们落入相邻镜边缘之间的间隙中,因此根本不会被检测到。该区域(过渡区)的宽度再次取决于距离所涉及的圆柱形反射镜的焦点曲线的距离di。特别地,前排镜的曲
率半径(这里为75mm)越大,过渡区越宽。如果光学系统在等离子体的直接视野中运行,则在它们的等离子体视野中落入该区域的谱线也可能受到损害。如果适用的话,使用来自相邻检测器的线的组合信号可能由于检测器特性的变化而成问题。因此,落入过渡区的谱线必须被认为是丢失的。
10.在de102007027010a1和us8649009b2中描述的非球面(离轴抛物面)反射镜作为用于偏转和垂直聚焦的另一个例子的使用没有解决de19853754b4的间隙的问题,它仅仅改进了垂直聚焦。
11.现有技术还反映在几个光谱仪中,其不使用或仅使用有限的垂直聚焦,也不使用偏转,或仅部分地从偏转平面进行偏转:通过以下可以实现几乎无间隙的波长覆盖,使用交替设置的:a)将光偏转出偏转平面的平面镜,相对于所指定的检测器偏转角度为b)直接光检测器单元(即没有任何反射镜的检测器),a和b沿两行排列,反射镜边缘与相邻直接光检测器的接收区域重叠(在从光栅中心看到的视线中)。当直射光检测器位于焦点曲线本身上时,过渡区的宽度在这里仅取决于偏转镜相对于焦点曲线的位置。通过用匹配的圆柱形反射镜代替平面镜,或者通过将例如具有适当成像特性的圆柱形透镜或棒透镜固定到检测器本身并适当地校正其相对于焦点曲线的位置,可以实现在隔离位置处的垂直聚焦。然而,圆柱形透镜或杆透镜的成像特性比圆柱形反射镜或非球面镜的成像特性差。实现无间隙覆盖的另一种方式是通过交替地将检测器安装在与焦点曲线相切的偏转平面的稍微上方和稍微下方,只要未压缩的谱线足够高(=在垂直方向上延伸),并且通过再次使检测器的接收区域重叠来实现。这种设置可以与非平面垂直聚焦相结合,例如通过将圆柱形透镜应用到检测器。然而,在非平面区域中,光量下降并且等离子体的视野可能受到影响。该装置还可以与从比检测器的接收区域更靠近偏转平面的区域收集光的方法相结合,例如,通过在检测器前面具有倾斜边缘的窗口用作潜望镜。在这些设置的任何一个中,重叠区域将允许选择在哪个检测器上测量所讨论的线。同样,由于在光学系统直视等离子体的情况下,可能不同的检测器特性和等离子体视野问题,不建议组合来自两个检测器的谱线的信号。
12.然而,希望在光学系统的整个可用波长范围内以最小化的过渡区宽度准连续地检测光谱,并且同时具有平面内垂直聚焦的选择。
技术实现要素:
13.本发明的一个目的是提供一种光学系统,通过最大限度地减少相邻的、重叠的和可能垂直聚焦的镜面元件之间的过渡区的范围,实现对所需波长范围内光谱的准连续检测。本发明的另一个目的是减少光学系统的整体尺寸(高度)。
14.该目的是由具有独立权利要求1的特征的光学系统解决的。从属权利要求2到11产生了光学系统的有利的进一步实施例。此外,该目的是由根据权利要求12的光谱仪解决的。
15.发明的光学系统包括:用于进入待分析的光的至少一个入射孔径,用于所述光的光谱偏转的至少一个衍射光栅,至少两个垂直聚焦镜元件,用于将所述光聚焦到指定给所述垂直聚焦镜元件的所述检测器上,以及至少两个测量所述光的光谱的探测器,其中每个光聚焦镜被指定给一个检测器。这里,所述检测器设置在所述光学系统的偏转平面的同一侧以降低光学系统的高度。所述垂直聚焦镜元件被布置为沿着两个多边形图形彼此偏移并
且与焦点曲线偏移的前排镜元件和后排镜元件,其中所述多边形图形的每个部分平行于与所述光栅的焦点曲线的专用局部切线。为了提供一个光学系统,通过最小化相邻的、重叠的和可能垂直聚焦的镜面元件之间的过渡区的范围,使光谱在所需的波长范围内得到准连续的检测,前排镜面元件的镜轴对焦点曲线的偏移最小。这是通过为布置成前排镜元件的垂直聚焦镜元件选择偏转角度来实现的,以便将其指定的探测器及其支架与可能发生碰撞的后排探测器及其支架折开。
16.特别有利的是,如果镜元件的长度低于其分配的探测器的接收区域的长度,并且镜元件的相邻端相互重叠或与没有指定镜元件的相邻探测器的接收区域重叠,这样,相邻探测器的接收区域以及它们的照明区域也会重叠。此外,如果通过使聚焦镜元件尽可能少地相互偏移以及通过使探测器和镜元件之间的最大发生距离d1最小化而使过渡区的宽度最小化是非常有利的。这是通过为前排镜元件选择偏转角度\f\<90
°
来实现的。因此,它们所分配的探测器和它们的支架可以折叠起来,远离可能碰撞的后排探测器和它们的支架。这与fr2953017b1相反,在该系统中只增加了ρ
cyl
,以便为指定的探测器创造必要的安装空间。最大限度地减少最大发生距离也将减少光学系统的总高度,这是本发明的第二个目的。此外,通过为前排镜元件选择偏转角与仅在偏转平面一侧布置检测器的现有光学系统相比,前排镜元件到焦点曲线的距离可以减少。在本发明的光学系统中,与焦距曲线的减小的距离减少了前排镜元件上的失焦线区域,降低了过渡区的宽度。
17.为了最大限度地减少检测器和镜面元件之间的最大发生距离d1,我们必须对上述帕邢-龙格型光谱仪中垂直聚焦镜和指定的检测器的2种不同的、示例性的空间安排的过渡区的结果宽度进行估计,并显示最有利的设置,参见图5。
18.在优选的实施例中,两个或更多的检测器配备了镜元件,它们彼此相邻,镜元件必须有不同的距离到焦点曲线,以便实现重叠。前排具有偏转角度根据探测器支架的形状,后排具有相同的偏转角度或更大的角度,如图1所示。
19.如果相邻的垂直聚焦镜元件的曲面具有不等的曲率半径以及不等的偏转角度,那就非常有利。因此,垂直聚焦镜元件和指定的检测器之间的距离以及系统的整体尺寸可以得到优化。
20.在另一个优选的实施例中,如果光学系统包括覆盖连续波长范围的检测器设置,特别有利的是,如果检测器设置的至少每一个第二检测器都配备一个镜元件,并且如果每个镜元件分别与任何相邻的反射镜或任何相邻的直接光检测器的接收区域重叠。这样,检测器的接收区域以及它们的照明区域就会重叠。通过为(前排)镜子元件选择偏转角度测器的接收区域以及它们的照明区域就会重叠。通过为(前排)镜子元件选择偏转角度它们被指定的检测器和它们的支架可以从可能发生碰撞的(后排)直接光探测器上折叠开来,为指定的检测器创造必要的安装空间。因此,前排可以更靠近直射光检测器,因为检测器支架不会发生碰撞。
21.在另一个优选的实施例中,至少一个所述垂直聚焦镜元件的反射表面的形状是圆锥的一部分,即该表面有可变的曲率半径,该曲率半径沿镜子轴线增加,以实现重叠。
22.在另一个优选的实施例中,至少一个所述垂直聚焦镜元件的反射表面的形状是圆柱体,例如,表面沿镜轴具有恒定的曲率半径。
23.在另一个实施例中,光聚焦元件是圆柱形反射镜和/或锥形反射镜。附加地或可选地,垂直聚焦元件是聚焦透镜,例如杆状透镜或圆柱形透镜与平面偏转镜元件相结合。垂直
聚焦元件的选择可以根据所需的任务、分辨率、使用的光栅、或光学系统的尺寸来决定。特别是不同垂直聚焦元件的组合,增加了光学系统的灵活性。此外,有可能构建垂直聚焦元件或光学系统,以便能够交换垂直聚焦元件,从而产生灵活和可升级的光学系统。
24.在另一个实施例中,至少一个检测器配备有用于垂直聚焦的透镜,例如,杆透镜或圆柱形透镜。
25.在另一个实施例中,光学系统的构建原理是paschen-runge设置或平场设置或czemy-tumer设置或ebert-fastie设置。
26.在一个非常有利的实施例中,检测器设置的检测器是线检测器,优选是ccd或cmos检测器。
27.根据本发明的光谱仪设备包括至少一个根据前述权利要求之一的光学系统,进一步包括与至少一个检测器设置相连的操作单元,以操作检测器设置并分析所测得的衍射光的光谱。
28.上面列出的实施例可以单独使用或以任何组合使用,以提供根据本发明的装置和方法。
附图说明
29.本发明的这些和其它方面在下面的图示中详细示出。
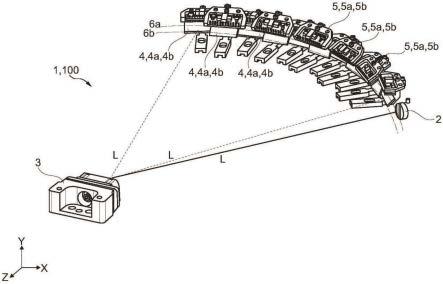
30.图1:当在等距视图测量衍射光时,根据本发明的光学系统的第一实施例的示意图;
31.图2:光学系统的第一实施例中的垂直聚焦元件和检测器的前视图的示意性和详细视图;
32.图3:光学系统的第二实施例中的垂直聚焦元件的等距视图的示意性和详细视图;
33.图4:光学系统的第三实施例中的垂直聚焦元件和检测器的等距视图的示意性和详细视图;
34.图5:根据现有技术的(a)和本发明(b)的不同方法中反射镜-检测器-设置的空间布置的平面外偏转和反射镜-检测器-设置;
35.图6:在离焦点曲线一定距离处的谱线的最小线宽;
36.图7:在法线点处垂直于偏转平面的截面,以确定有利的几何形状,两个反射镜之间实现最小安全距离s,产生最小的过渡区宽度wt;
37.图8:根据本发明的光学系统的光路和角度的示意图,作为罗兰圆光学(rowland circle optic)。
具体实施方式
38.图1示出了在帕邢-龙格设置中的光学系统1的一般布置,包括入射孔径2、待分析的光l通过入射孔径2进入的光学系统1、用于光l的光谱散射的光栅3、聚焦光l的垂直聚焦镜元件4、和用于测量光l的光谱的检测器5。为了聚焦散射光,垂直聚焦镜元件4沿着两个多边形图形6a,6b排列,6a,6b彼此偏移并与焦点曲线偏移。多边形图的每个部分平行于其与光栅3的焦点曲线的专用局部切线,然后可由被指定到每个垂直聚焦元件4的检测器5测量。由于垂直聚焦镜元件沿着多边形图形6a,6b布置,所以检测器5或其中线和焦点曲线可以相
互叠加。在光学系统中,垂直聚焦元件4的相邻端7a,7b重叠并且垂直聚焦镜元件和检测器之间根据公式(1)计算的最大距离d最小化是特别重要的。通过为前排镜元件选择偏转角在该示例中为60
°
,可以确保几乎无间隙地测量所覆盖的波长范围。
39.图2示出了在图1所示的实施例中使用的垂直聚焦镜元件4和检测器5的布置的细节。图1和图4的实施例的垂直聚焦镜元件4沿着两个多边形图形6a,6b布置,多边形图形6a,6b彼此偏移并与焦点曲线偏移。在图2的视角中,两个多边形图形6a,6b彼此落在一起,这就是为何只能看见一个多边形图形的原因。多边形图形的每个部分与光栅3的焦点曲线的专用局部切线平行。在该实施例中,垂直聚焦镜元件4a被指定给检测器5a,而垂直聚焦镜元件4b被指定给检测器5b。为了更容易地处理这些元件,每个检测器5a和垂直聚焦镜元件4a安装在基板9上。这也适用于具有其相应的垂直聚焦镜元件4b的检测器5b。垂直聚焦镜元件4a,4b布置在根据公式(1)计算的到焦点曲线的距离d(4a)和d(4b)内,并且检测器5a和5b的中线与焦点曲线重叠。
40.通常,偏转角可以小于或等于90
°
。这里,相邻垂直聚焦元件的偏转角不相等,并且镜元件4a的偏转角为90
°
,而镜元件4b的偏转角为60
°
。通过镜元件4a,4b的曲面8对垂直聚焦进行进一步的影响。镜元件4a的曲面8的曲率半径ρ(4a)=27.5mm,为圆柱形的表面,镜元件4b的曲面8的曲率半径ρ(4b)=35mm,也为圆柱形表面。该实施例允许在最小化d(4b)的同时重叠垂直聚焦镜元件的相邻端。该实施例还允许容易地更换垂直聚焦元件4,使得镜元件可以容易地被平面镜元件替换,以抑制聚焦,从而在需要时降低强度水平。此外,还可以用平面偏转镜元件和聚焦透镜的组合来替换聚焦镜元件。
41.在图3所示的第二实施例中,垂直聚焦镜元件是锥形镜。每个垂直聚焦镜元件4的纵轴a与多边形图形6相交,多边形图形6的每个部分平行于它们与焦点曲线的专用局部切线。多边形图形部分和局部切线之间的距离由公式(1)给出,其中ρ
cyl
必须用ρ
avg
代替,ρ
avg
是在本实施例中表征的聚焦锥形镜元件的平均曲率半径。相邻的垂直聚焦锥形镜元件4具有相等的偏转角,在这种情况下为90
°
。由于锥形镜元件的曲率半径在沿着其纵轴的每个点处是不同的,因此公式(1)将为沿着镜元件的纵轴的每个点提供与焦点曲线不同的距离d。因此,镜元件的纵轴与多边形图形相交,并且该轴不能在图形本身上。由于锥形镜元件一端的曲率半径小于另一端的曲率半径,因此相应的距离不同,因此相邻的和相同的锥形镜元件可以像屋顶的瓦片一样重叠,从而提供波长范围的准连续覆盖,同时使相邻锥形镜元件之间的过渡区的宽度最小化。落在锥形镜元件的特定点上的光谱线的波长的切向焦点当然也不受偏离偏转平面的偏转或者在垂直于偏转平面的方向上的垂直聚焦的影响。因此,检测器不能像在其它实施例中那样与偏转平面平行,但是必须围绕来自ρ
avg
的光束击中它的点倾斜,同时与锥形镜元件的纵轴保持在同一平面。通过适当的倾斜,沿着锥形镜的纵轴实现了每个波长击中每个点上的正确切向聚焦。也可以使用具有不同ρ
avg
和/或不同偏转角的相邻锥形镜元件。
42.图4中的第三实施例具有比垂直聚焦镜元件4更多数量的检测器5。有必要将每个垂直聚焦镜元件4指定给检测器5,但是为了检测光,没有必要使每个检测器5指定有垂直聚焦镜元件4。不具有指定的垂直聚焦镜元件4的这些直接成像检测器5c直接沿着光栅3的焦点曲线的一部分布置。无论如何,这些直接成像检测器5c必须是被认为是相邻的垂直聚焦元件4相似的,使得直接成像检测器5c的相邻端7a,7b与相邻的垂直聚焦镜元件4的相邻端
重叠。使用不具有垂直聚焦镜元件4的直接成像检测器5c使得光谱的一部分能够直接成像到检测器5上。图4的实施例3还使用用于曲面8的具有不同曲率半径ρ的垂直聚焦镜元件4。垂直聚焦元件4b具有无限的曲率半径ρ,使得曲面8看起来是平面的。而垂直聚焦元件4a具有比垂直聚焦元件4b更小的曲率半径ρ,使得曲面8看起来是圆柱形的。光聚焦元件4a,4b的曲率半径ρ的差意味着利用聚焦镜元件4a有效地实现垂直聚焦,而镜元件4b根本不进行任何聚焦。为了将相同的基板用于两个检测器单元,选择相同的偏转角度,即在该示例中
43.图5示出了根据现有技术的(a)和本发明(b)的不同方法中镜-检测器设置的空间布置的平面外偏转和反射镜-检测器-设置。图5a示出了根据fr2953017b1中公开的现有技术的光学系统1s,其中的偏转角被用于两排镜-检测器(前排镜和后排镜),其沿两个彼此广泛偏移的多边形图布置。这里,镜元件10s彼此之间具有较大的距离,以便将入射光l从散射平面dp向检测器11s偏转为偏转光ld。如果距离较小,后排和前排镜10s的检测器11s或它们的支架将会碰撞。为了匹配前排镜10s和检测器11s之间的长距离,调整镜元件10s的垂直曲率。然而,前排镜元件10s远离焦点曲线的位置导致前排镜10s的离焦位置处的光谱线的较大区域,导致相邻的前排和后排反射镜之间的重叠效应,导致靠近反射镜10s的边缘的部分光将不会被专用的前排镜反射,而是无意地穿透到后排镜10s。图5b示出了根据本发明的光学系统1,其特征是在前排镜元件4,4b的边缘处具有最小化的过渡区。在光拾取器处使用的偏转镜在两种方法中都是圆柱形的,以便提供垂直聚焦的镜元件4,4a,4b。当插入偏转角时,根据公式(1)计算镜轴到焦点曲线fc的距离d1,2(详见图7)。当使用小于90
°
的偏转角时,与图5a相比,两个反射镜之间的距离δ=d1-d2小得多,从而导致前行镜元件4,4b与相应的检测器5,5b之间的距离d1较短,一方面提供了较小的光学系统1高度(为了更好的比较,将根据图5a所示的现有技术的检测器位置作为虚线添加到图5b中)。另一方面,离焦点曲线fc的距离d1越近,导致在前排镜元件4,4b的边缘处的过渡区域最小化。后排镜元件4,4a的偏转角为90
°
仅仅是一个示例,并且对于其它实施例可以是不同的。
44.图6示出了在离焦点曲线距离d处的谱线的最小线宽t。这里,罗兰光栅具有曲率半径(roc)rg,并且在光栅3上具有宽度为w的照明区域,采用围绕法向点n的光拾取器,法向点n也是位于法向波长λ在β=0
°
处的焦点曲线fc上的焦点。角度ξ对应于光栅的半照明角度。在距焦点n的距离d处β=0
°
处的谱线的宽度t由以下公式确定:(2)t=2d tanξ其中,(3)sinξ=w/2rg。
45.图7示出了在法线点处垂直于偏转平面的截面,以确定用于在两个垂直聚焦镜元件反射镜4,4a,4b之间获得最小安全距离s的有利几何形状,其中一个是前排而另一个是后排,从而产生照明两个垂直聚焦镜元件4a,4b的光谱线的过渡区的最小宽度。下式可以从图7得到。(4)h
1,2
ρ
cyl-1,2
(1-cos(arcsin(b/2ρ
cyl-1,2
)))(5)(6)(7)δ=d
1-d2(8)
(9)(10)(11)
46.其中dm表示镜元件的中心厚度,b表示镜元件的高度。为了执行进一步的审议,可以估计合理的最大镜面高度b。在火花oes中,电极尖端和样品(=反电极)之间的距离通常在2mm和5mm之间。耦合透镜或成像耦合反射镜或反射镜装置将来自所产生的等离子体的光成像到入射孔径上,照射其整个高度达5mm。在光谱仪的光学系统中,衍射光栅3的成像误差将导致线(尤其是)变得比入射狭缝的高度更长。作为罗兰圆光栅的经验法则,可以假定平均长度为7mm。为了使用如本发明的后排镜元件4,4a中实现的偏转角的圆柱形反射镜将来自光谱线的整个长度的光聚焦到检测器5的传感器上,圆柱形反射镜高度需要为b=10mm,高(=7mm/cos(45
°
))。
47.只有完全落在垂直聚焦镜元件4,4a,4b上的光谱线才被认为是可用的,这使得相邻反射镜之间的过渡区wt的宽度是可用的:(12)wt=2t(β)
48.由于两种方法(现有技术和根据图5a和5b的本发明)中的过渡区wt的宽度仅由di确定,所以前排镜(最靠近衍射光栅)到焦点曲线fc的距离。在根据图5a和5b的方法中,假设后排镜元件4,4a,10s的曲率半径ρ
cyl-2
相同,任务是最小化δ,即两个方法的两个多边形图形6a,6b之间的距离。这里,我们将前和后排镜元件4,4a,4b之间的最接近的安全距离s设定为s=1mm,以找到ρ
cyl-1
,和的适当值。假设dm=2.2mm并且b=10mm,并且对于前排和后排镜元件4,4a,4b都取dm和b的值,并且进一步假设rg=400mm并且w=40mm,使得sinξ=0.05(公式2 3),将获得如图5a(现有技术的光学系统1s)和5b(本发明的光学系统1)所示的设置:光学系统1s:ρ
cyl-1
=75mm,光学系统1:ρ
cyl-1
=35mm,
49.对于图5a(现有技术的光学系统1s)和图5b(本发明的光学系统1)中在法线点n处的方法,使用这些值得到了过渡区的宽度wt的以下结果:光学系统1s:d1=26.517mm和d2=9.723mm wt=2.6517mm光学系统1:d1=15.155mm和d2=9.723mm wt=1.5155mm
50.根据本发明,与光学系统1的较大过渡区wt相比,光学系统1的较小过渡区wt示出了的光学系统1的改进的性能。
51.图8示出了根据本发明的光学系统的光路和角度的示意图,作为罗兰圆光学,其中β表示发生的衍射角,α表示入射角,ω表示中间光束相对于垂直方向射到聚焦镜元件上的入射角,o表示随β而增加的偏移,t表示距离d处随β增加的线宽,n表示法线点,w表示照明光栅宽度,rg表示光栅的曲率半径以及ξ的测定。从图8可以看出,尽管衍射角β>0
°
,距离d和角度ξ沿着焦点曲线(在这种情况下是罗兰圆)的走向保持恒定,但是根据公式,从圆柱形镜元件4,4a,4b的轴线到检测器5,5a,5b的像素带lp的光路长度随着β的增加而增加:(13)l
p
=d/cosω
52.圆柱形反射镜的轴与像素带的中心点相互偏移,偏移量为o:(14)od tanω
53.为了计算镜面上除0以外的β的谱线的宽度t(β),必须用公式(2)中的(l
p
/cosω)代替d,得到:(15)t(β)=2d tanξ/cos2ω
54.其中ω对β是特定的并且取决于焦点曲线fc的走向。对于罗兰圆光学器件,ω=β适用。
55.为了确定衍射角和焦点曲线上的焦点,光栅方程:(16)n gλ=sinα sinβ
56.后焦点方程:(17)其中:n 衍射级别g 光栅常数(@光栅中心每mm的凹槽数)λ 衍射波长α 入射角β 衍射角la 入射孔径与光栅中心之间的距离lb 衍射λ的焦点与光栅中心之间的距离r 光栅基板的曲率半径λ0 光栅制作中使用的曝光波长cf 平场常数;被使用;如果cf=0,则包括光学系统的所有元件位于称为罗兰圆的圆上。
57.图1至图8中所示的实施例的垂直聚焦镜元件主要被描述为圆柱形反射镜,但是也可以具有曲面8的镜元件,曲面8具有无限的曲率半径ρ,因此是平面的或者具有几个曲率半径ρ形成的锥形表面的曲面8。因此,可以使用平的,圆柱形的或锥形的反射镜。如果在光学系统1中使用其组合,则是特别有益的。聚焦透镜,如杆透镜或圆柱形透镜,可以用于所有上述实施方案,例如与平面偏转镜相结合,而不是作为垂直聚焦元件4的垂直聚焦镜元件。
58.在如上所述的帕邢-龙格-安装中的光学系统1的设置不是限制性的,而是光学系统1的图1至图8的实施例也适用于平场设置或czerny-turner-setup或ebert-fastie-setup。
59.此外,在上述所有实施例中,检测器5以及直接成像检测器5c都是线检测器,例如ccd或cmos检测器。
60.上述光学系统1和操作单元中的至少一个可以用在光谱仪设备中,这不再进一步描述。由此操作单元至少连接到至少两个检测器5的检测器装置,以便操作这些至少两个检测器5并分析所测量的光谱l。
61.这里所示的实施例仅仅是本发明的示例,因此不能被理解为是限制性的。本领域技术人员所考虑的替代实施例同样被本发明的保护范围所覆盖。附图标记列表1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
根据本发明的光学系统1s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
根据现有技术的光学系统2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
入射孔径3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光栅4,4a,4b
ꢀꢀꢀꢀꢀꢀ
垂直聚焦镜元件(本发明)5,5a,5b
ꢀꢀꢀꢀꢀꢀ
检测器(本发明)5c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
直接成像探测器6,6a,6b
ꢀꢀꢀꢀꢀꢀ
多边形图形,部分与镜元件后面的焦点曲线的局部切线平行7a,7b
ꢀꢀꢀꢀꢀꢀꢀꢀ
垂直聚焦元件的相邻端部8
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
曲面9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
基板10s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
垂直聚焦镜元件(本发明)11s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
现有技术的检测器100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光谱仪装置α
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
入射角β
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
衍射角
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏转角
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
前排垂直聚焦镜元件4b的偏转角
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
后排垂直聚焦镜元件4a的偏转角ξ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
sinξ=w/2rg得出的角度ω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
相对于垂直中间光束到垂直聚焦镜元件的入射角a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
长轴a
′
1,2
ꢀꢀꢀꢀꢀꢀꢀꢀ
得出的距离a
1,2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
得出的距离b
′
1,2
ꢀꢀꢀꢀꢀꢀꢀꢀ
得出的距离b
1,2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
得出的距离b
′1(a2)
ꢀꢀꢀꢀꢀꢀ
得出的距离b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
图3示出的垂直聚焦镜元件4垂直于a轴的长度(高度)d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
根据公式(1)的到焦点曲线的距离d1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
焦点曲线与垂直聚焦前排镜的偏转表面的轴线之间的距离d2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
焦点曲线与垂直聚焦后排镜的偏转表面的轴线之间的距离δ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d1和d2的差,其中所述差对应于两个多边形图形6a,6b的距离δsꢀꢀꢀꢀꢀꢀꢀꢀꢀ
根据现有技术的光学系统的偏转平面中的后排垂直聚焦元件和前排垂直聚焦元件之间的距离daꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
入射孔径和光栅中心的距离dbꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏转波长λ(β)的焦点和光栅中心的距离dp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏转平面dm
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
垂直聚焦镜元件的中心厚度fc
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
焦点曲线h
1,2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀh1,2
=ρ
cyl-1,2
(1-cos(arcsin(b/2ρ
cyl-1,2
)))得出的垂直聚焦镜元件的曲率高度
lp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
检测器的像素带l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
来自样品的光ld
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏转光n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
法线点,法线波长β=0的焦点o
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
圆柱形反射镜的轴的中心点和检测器的像素带之间的偏移ρ
cyl
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
曲面8的曲率半径ρ
cyl-1
ꢀꢀꢀꢀꢀꢀꢀꢀ
前排垂直聚焦镜元件4b的曲面8的曲率半径ρ
cyl-2
ꢀꢀꢀꢀꢀꢀꢀꢀ
后排垂直聚焦镜元件4a的曲面8的曲率半径rgꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光栅3的曲率半径s
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
得出的安全距离t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
距离焦点曲线d的线宽w
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光栅3的照射宽度x
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
横轴y
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
垂直于x轴和z轴的轴z
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
纵轴
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。