1.本发明涉及一种激光雷达传感器和一种相关的传感器布置。
背景技术:
2.当前,汽车环境中通常使用三种不同类型的激光雷达传感器。其中包括通常用于测量任务的非汽车激光雷达系统、用于汽车环境中的试驾(和小系列,kleinserien)的非汽车激光雷达系统和汽车激光雷达系统。
3.在前两种类型中,即在非汽车激光雷达系统中,外貌以及在部分情况下车辆集成的光学相当不重要。通常需要宽的视野,因此经常使用带有主动转子的激光雷达传感器。在此,激光雷达系统大多关于其纵向轴对称。
4.在汽车激光雷达系统中,外貌和车辆中的集成发挥着重要作用。每个车辆都通常使用一个激光雷达传感器,该激光雷达传感器例如布置在大灯之间的散热器格栅中或前挡泥板中/前挡帘中。激光雷达传感器在此大多布置在车辆中心的左侧或右侧。
5.现在添加了一种新的激光雷达系统类型。在此涉及汽车激光雷达系统,所述汽车激光雷达系统能够用于辅助系列车辆中的自主行驶。为此,将多个(例如6件或7件)激光雷达传感器安装在一个车辆中。对车辆集成/外貌的需求在此显著比在测试车辆中高。这种激光雷达传感器的视野在水平方向上约为110到120度。
6.在自主行驶时,对激光雷达传感器的可用性的要求显著比在其他应用中高。因此,尤其必要的是,特别是在恶劣天气或降水中行驶时使传感器的视野保持为尽可能无污物且无液滴的。为此,不仅使用喷水来工作而且通过擦拭来清洁视窗都是有利的。
7.为了避免擦拭器的提前磨损,在擦拭片的运动区域中不应有接合部位/棱边。因此,有利地存在挡风玻璃的区域并且因而存在激光雷达传感器的视窗的区域,该区域对于激光雷达功能来说不是必需的并且玻璃擦拭器能够“停放”在该区域中。这种位置称做“停放位置”。
8.这个区域需要附加的空间或者说扩大激光雷达的壳体。在车辆中的对称(镜像)的安装位置(例如左侧和右侧挡泥板)中,现在需要擦拭器(相对于车辆)的两个不同的停放位置和两个(由于空气动力学、擦拭器的暴露、视野)不同的车辆集成,或需要在具有激光雷达壳体的相应附加的加宽部的激光雷达上的两个停放位置。
技术实现要素:
9.根据本发明的激光雷达传感器包括视窗和清洁单元,其中,所述激光雷达传感器具有竖轴,所述竖轴将激光雷达传感器的第一侧与激光雷达传感器的第二侧连接,其中,第一侧和第二侧是相对置的侧,所述视窗布置在激光雷达传感器的前侧上,所述前侧将激光雷达传感器的第一侧与第二侧连接,所述激光雷达传感器具有后侧,所述后侧将激光雷达传感器的第一侧与第二侧连接,所述清洁单元布置在激光雷达传感器的前侧上,其中,当清
洁单元位于停放位置中时,所述清洁单元沿着竖轴的方向在前侧上延伸,并且,所述激光雷达传感器适用于,如此安装在车辆上并且被运行,使得第一侧或第二侧选择性地是激光雷达传感器的上侧。
10.因此实现了一种激光雷达传感器,该激光雷达传感器也能够倒置地(kopf
ü
ber)安装,从而能够省去用于清洁单元的第二停放位置,并且,在将多个激光雷达传感器布置在一个车辆上的情况下仍然能够确保对称构型。这意味着,激光雷达传感器尤其能够布置在车辆的右侧上以便检测车辆右侧的周围环境,或也能够布置在车辆的左侧上以便检测车辆左侧的周围环境。因此能够将结构相同的传感器布置在车辆的右侧或左侧上,其中,保持获得车辆的对称外貌(erscheinungsbild)。在此,无需例如为了改变清洁单元的停放位置而重新配置清洁单元。
11.因此实现了一种激光雷达传感器,该激光雷达传感器能够布置在车辆的要么右侧、要么左侧,其中,能够使用结构相同的传感器,以便将它们布置在车辆的右侧和左侧。由于激光雷达传感器适用于选择性地以第一侧或第二侧作为上侧布置在车辆上,停放位置能够保持不变并且在车辆上的多个激光雷达传感器外貌保持更加对称。如果在激光雷达传感器布置在车辆的右侧的情况下,激光雷达传感器上的清洁单元的停放位置例如在车辆上的布置方面位于车辆的车辆前部的侧上,则在激光雷达传感器布置在车辆的左侧上并且选择第二侧而非第一侧作为激光雷达传感器的上侧的情况下(即当激光雷达传感器倒置安装的情况下),该停放位置同样位于车辆前部的侧上。
12.与围绕竖轴转动的传感器相反,无需为了将所述传感器布置在车辆的相对置的侧上而重新确定清洁单元的停放位置以获得对称外貌。因此,无需给车辆上的不同安装位置提供不同的激光雷达传感器,或使得能够重新配置激光雷达传感器的停放位置。此外,激光雷达传感器能够更紧凑地构造,因为无需如此构型前侧或视窗,使得,取决于激光雷达传感器安装在车辆的右侧或左侧,清洁单元能够进入的不同停放位置。
13.当激光雷达传感器安装在车辆时,第一侧和第二侧因此是该激光雷达传感器的上侧和下侧。在此,然而不能够将第一侧和第二侧称为上侧或下侧,因为第一侧和第二侧都能够被视为上侧,这取决于激光雷达传感器如何安装在车辆中。激光雷达传感器适用于,如此安装在车辆上并且被运行,使得第一侧或第二侧选择性地是激光雷达传感器的上侧。这首先意味着,如此设计激光雷达传感器中的机械学(mechanik),使得无论在激光雷达传感器布置在车辆上的情况下第一侧还是第二侧是激光雷达传感器的上侧,该机械装置都能够被运行。因此,尤其是激光雷达传感器中的支承(lager)被如此设计,使得无论激光雷达传感器的第一和第二侧中的哪个用作激光雷达传感器的上侧,例如偏转单元都能够在激光雷达传感器中可靠地运行。
14.激光雷达传感器的竖轴不是结构元件而是虚拟的轴,该虚拟的轴描述激光雷达传感器的取向。当激光雷达传感器安装在车辆中时,激光雷达传感器的竖轴典型地相应于车辆的竖轴。
15.激光雷达传感器具有带有视窗的前侧。视窗是透明的构件,光束由激光雷达传感器发射通过该构件,并且,来自激光雷达传感器的环境的反射通过该构件由激光雷达传感器接收。激光雷达传感器的第一侧、第二侧、前侧和后侧优选是激光雷达传感器的壳体的侧。视窗优选在激光雷达传感器的整个前侧上延伸。激光雷达传感器的前侧是激光雷达传
感器以下侧:该侧在将激光雷达传感器集成安装到车辆车身上时形成车辆的车身的外置表面的一部分。可选地,激光雷达传感器的前侧因此由密封唇(dichtlippe)界定。激光雷达传感器的后侧是激光雷达传感器的、在将激光雷达传感器集成安装到车辆车身上时不可见的侧。
16.清洁单元优选是机械清洁单元,其在清洁过程中从停放位置出发运动经过视窗或视窗的部分。停放位置在此能够要么位于视窗上方么位于视窗旁边。
17.当清洁单元位于停放位置中时,清洁单元沿着竖轴的方向在前侧上延伸。在此,清洁单元优选在沿着竖轴在视窗的、由清洁单元清洁的区域上延伸。
18.从属权利要求优选示出本发明的扩展方案。
19.优选,清洁单元包括擦拭片,该擦拭片在停放位置中平行于竖轴布置。擦拭片在此能够布置在要么视窗上面、要么视窗旁边的停放位置中。在此,擦拭片尤其如此布置,使得该擦拭片在设置用于擦拭的方向上从停放位置(即其静止位置)中出来在线性运动中运动经过视窗。因此,擦拭片的刮除边缘(abziehkante)优选平行于竖轴延伸。
20.优选,清洁单元设置用于,从停放位置中出来运动经过视窗,其中,清洁单元在与竖轴成直角的运动方向上运动。这意味着,清洁单元优选沿在激光雷达传感器的第一和第二侧之间延伸的纵向方向运动经过视窗,如果该清洁单元被操控用于此。相反,这意味着:清洁过程不是通过从上到下指向的运动来实施的。清洁过程通过线性运动来实施。因此实现了激光雷达传感器的特别简单的结构。
21.也有利的是,激光雷达传感器具有支架,该支架能够实现激光雷达传感器的固定并且如此成形,使得该激光雷达传感器关于垂直于竖轴的对称平面对称。对称平面在此是支架的对称平面,其中,对称平面也在相对于竖轴的一半高度处穿过激光雷达传感器。激光雷达传感器本身(即激光雷达传感器不包括支架)并非一定必须相对于对称平面对称地构造。因此,尤其是在激光雷达传感器的内部中,部件能够相对于对称平面不对称地布置。优选,用于接通激光雷达传感器的插接连接也并非一定必须相对于对称平面对称地布置。由于支架关于对称平面对称,实现了,激光雷达传感器的支架固定在车辆上的支撑点能够彼此对称地实施在车辆的不同侧上。
22.此外有利的是,支架在此包括一个在对称平面上的中心的保持点和/或具有两个对称布置在对称平面的不同侧上的偏心的(auβermittig)保持点。尤其有利的是一个中心的保持点和两个偏心的保持点的组合。通过偏心的保持点,能够特别有效地固锁(sichern)激光雷达传感器以防止扭转。中心的保持点在此能够被成本特别有利地实施并且实现了激光雷达传感器的简单安装。在一个中心的保持点和两个尤其布置在激光雷达传感器的后侧上的不同侧、优选相对置侧上的偏心的保持点的组合中,一方面固锁激光雷达传感器以防止扭转并且另一方面将激光雷达传感器固锁在其位置的两侧。所述保持点并且因而该支架优选布置在激光雷达传感器的后侧上。
23.此外有利的是,带有视窗的前侧如此成形,使得它关于垂直于竖轴的对称平面对称。以这种方式确保了,激光雷达传感器的外貌与该激光雷达传感器布置在车辆的右侧还是左侧无关。
24.有利的是激光雷达传感器具有纵向轴,该纵向轴沿着前侧延伸并且垂直于竖轴,并且,激光雷达传感器的光学中心在纵向轴上远离激光雷达传感器的几何中点。在此,激光
雷达传感器的视野尤其如此取向,使得激光雷达传感器在这种区域中穿过具有相关的视窗的前侧,使得在前侧上仅剩余的一个单个的其他区域,该其他区域足够大以形成清洁单元的停放位置。光学中心在此是一个点,扫描光束在从外部观察激光雷达传感器时看起来是从该点出发的,如果该扫描光束在离开激光雷达传感器之前线性且无偏转地走向。这意味着,激光雷达传感器的扫描光束如此穿过前侧上的视窗,使得至少在一侧上留有足够的空间,以在不会妨碍激光雷达传感器的射束走向的情况下将清洁单元在该位置置入停放位置中。进一步优选,激光雷达传感器的扫描光束如此穿过前侧上的视窗,使得在另一侧上没有足够的空间,以在不会妨碍激光雷达传感器的射束走向的情况下将清洁单元该位置置入停放位置中。同时有利的是,激光雷达传感器的观察方向朝向车辆前部的方向或车辆尾部的方向,即沿着纵向轴指向确定方向。激光雷达传感器因此能够朝确定方向观察。激光雷达传感器的观察场(blickfeld)可以是不对称的。
25.有利的是,能够配置激光雷达传感器的扫描方向、尤其是激光雷达传感器的进行转动的偏转单元的旋转方向。因此,当激光雷达传感器安装在车辆的右侧上时,激光雷达传感器的扫描方向能够例如调设为右旋的,并且,当激光雷达传感器安装在车辆的左侧上时,激光雷达传感器的扫描方向能够调设为左旋的。替代地,当激光雷达传感器安装在车辆的左侧上时,激光雷达传感器的扫描方向能够例如调设为右旋的,并且,当激光雷达传感器安装在车辆的右侧上时,激光雷达传感器的扫描方向能够调设为左旋的。由于激光雷达传感器设置用于倒置地安装在车辆的侧之一上,因此借此能够实现,不同激光雷达传感器相对于车辆的扫描方向是相同的。由此能够防止,不同激光雷达传感器的扫描光束彼此相遇并且相互影响。
26.同样有利的是,激光雷达传感器设置用于接收同步信号,所述同步信号实现激光雷达传感器的扫描过程与预给定的时间频率和/或预给定的相位的同步。扫描过程的时间频率在此由激光雷达传感器覆盖其视野一次所需要的时间的长度决定。重复的、单次的检测视野给出时间频率。因此通过同步信号能够调设,激光雷达传感器如何快速地检测其周围环境。激光雷达传感器的相位和激光雷达传感器的扫描过程限定激光雷达传感器的扫描光束何时处于确定的位置。由于激光雷达传感器的扫描过程的时间频率和相位能够通过同步信号来调设,其中,在同步信号中限定了尤其是相位和时间频率,因此多个激光雷达传感器能够与彼此同步,例如如此同步,使得它们的扫描光束不会相遇。
27.此外,包括至少两个根据本发明的激光雷达传感器的传感器布置也是有利的,其中,激光雷达传感器中的一个的第一侧和激光雷达传感器中的另一个的第二侧布置在共同的侧上。传感器布置在此尤其是在车辆上的传感器布置,其中,激光雷达传感器中的一个布置在车辆的第一侧上,并且,激光雷达传感器中的另一个布置在车辆的相对置的侧上。传感器布置具有各个激光雷达传感器的所有优点并且在此能够成本特别有利地被提供为对称的传感器布置。
附图说明
28.下面参考附图详细描述本发明的实施例。在附图中:
29.图1示出根据本发明的一个实施方式的激光雷达传感器的示意图,
30.图2以横截面示出根据本发明的激光雷达传感器的示意图,
31.图3以侧视图示出根据本发明的激光雷达传感器的示意图,
32.图4以后视图示出激光雷达传感器的示意图,
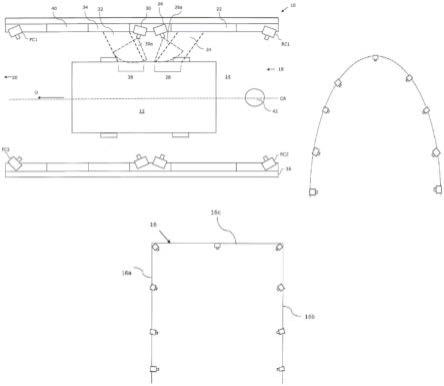
33.图5示出传感器布置,在该传感器布置中激光雷达传感器布置在车辆的车辆前部上,以及
34.图6示出传感器布置,在该传感器布置中多个激光雷达传感器布置在车辆上。
具体实施方式
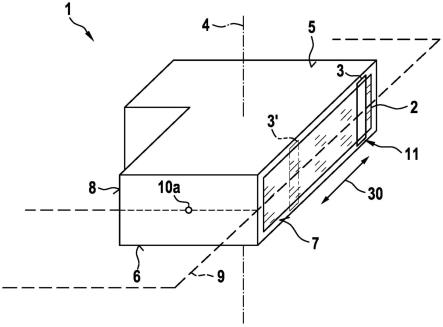
35.图1示出根据本发明的激光雷达传感器1的示意图。在此,以外部视图示出激光雷达传感器1,其中,在图1中示出激光雷达传感器1的壳体。
36.激光雷达传感器1具有第一侧5和第二侧6。在此,在图1上部示出第一侧5,并且,第二侧6在图1中是激光雷达传感器1的所示出的视图的下侧,该下侧在立体视图中然而是不可见的。激光雷达传感器的第一侧5和第二侧6如此布置,使得这些侧由激光雷达传感器1的竖轴4穿过并且因此通过竖轴4连接。竖轴4在此仅为图1中示出的虚拟轴,以便限定激光雷达传感器1的各个部件的定向。竖轴4不是激光雷达传感器1的结构元件。因此,激光雷达传感器1的第一侧5和第二侧6是激光雷达传感器1的两个相对置的侧。根据激光雷达传感器1如何布置在空间中,第一侧5是激光雷达传感器的上侧,或者,第二侧6是激光雷达传感器1的上侧。以相应的方式,要么第一侧5是激光雷达传感器1的下侧,要么第二侧6是激光雷达传感器1的下侧。
37.激光雷达传感器1具有前侧7,在该前侧上布置有激光雷达传感器1的透明的视窗2。视窗2优选在整个前侧7,然而也能够仅包括前侧7的部分区域上延伸。激光雷达传感器1的前侧7将第一侧5与第二侧6连接。在此,激光雷达传感器1的前侧7是激光雷达传感器1的这种侧,该侧在激光雷达传感器1在车辆上的结构布置中典型地与该车辆的车身齐平地终止。在此,激光雷达传感器1典型地如此布置在车辆上,使得只有前侧7可见。因此,前侧7尤其也能够如此成形,使得其具有一定的曲率,以便其最佳地适应于车身形状。
38.激光雷达传感器1还具有后侧8,该后侧将第一侧5与激光雷达传感器1的第二侧6连接。在此,激光雷达传感器1的其余侧被视为激光雷达传感器1的后侧8,所述其余侧将第一与第二侧5、6连接但不属于激光雷达传感器1的前侧7。激光雷达传感器1的后侧8是激光雷达传感器1的、在激光雷达传感器1在车辆上的结构布置中典型地由车身隐藏的那些侧。
39.在激光雷达传感器1的前侧7上布置有清洁单元3。清洁单元3在此包括擦拭片,该擦拭片可运动地被支承,以便运动经过视窗2。在替代实施方式中,清洁单元3例如是刷子或由多个薄片构成的组件。通过清洁单元3实现了对视窗2的清洁。在此,清洁单元3以及因此擦拭片在与竖轴4成直角的运动方向上运动。这个运动方向在图1中由双箭头30显示。带有擦拭片的清洁单元3的精确运动轨迹由前侧7的和视窗2的表面形状得出。为了达到在视窗2上的清洁效果,必需的是,使清洁单元3与视窗2持续接触,当该清洁单元运动经过视窗2时。为了达到清洁效果并且覆盖视窗2的整个高度,清洁单元3的擦拭片平行于竖轴4地布置。
40.如果不需要清洁单元3,则将其在前侧7上的确定位置处置于停放位置11中,其中,清洁单元3的擦拭片平行于竖轴4地布置。换言之,这意味着,限定一个确定位置,如果不需要该清洁单元,则清洁单元3移动至该确定位置。这个位置同样位于前侧7上。为了使激光雷达传感器1的视野不受清洁单元3限制,需要相应地确定前侧7的尺寸,以便使激光雷达传感
器1的光场可以不受视窗2的限制,并且在前侧7上存在足够的空间,以便清洁单元3能够移动到停放位置11中。
41.在当前的车辆系统中,通常需要将多个激光雷达传感器布置在一个车辆上。因此,例如多个图1中示出的激光雷达传感器1被布置在一个车辆上。激光雷达传感器1适用于,如此安装在车辆20上并且被运行,使得,选择性地第一侧5或第二侧6是激光雷达传感器1的上侧。可以看出,图1中示出的激光雷达传感器1在旋转(以便使在图1中的上部的第一侧5向下旋转)之后,清洁单元3关于其运动方向保持在恒定的位置处。换言之,这意味着:如果图1中示出出的激光雷达传感器1如此安装在车辆上,使得停放位置11在车辆的车辆前部的方向上处于前侧7上,则当激光雷达传感器1旋转了180
°
、即倒置以使第一侧5向下旋转时,停放位置11同样在车辆前部的方向上位于前侧7上。由此得出,相对于两个图1中示出的激光雷达传感器1安装在其中的车辆100的停放位置11,其中,激光雷达传感器1中的一个安装在车辆100的右侧上并且激光雷达传感器1中的一个安装在车辆100的左侧上,两个激光雷达传感器1的清洁单元3的停放位置11将实现在车辆30上的两个激光雷达传感器1的对称外貌。即使在车辆30的右侧上和车辆30的左侧上的激光雷达传感器1的结构相同,这也是可能的。如果激光雷达传感器1围绕竖轴4仅旋转了180
°
,这将是不可能的,因为在这种情况下停放位置11将从车辆30的前侧移动到车辆30的尾部侧上。因此,需要限定第二停放位置11。然而,这将导致,激光雷达传感器1需构型为具有更大尺寸的前侧7,以便无论停放位置11如何配置在激光雷达传感器1上,都不限制激光雷达传感器1的视野。
42.图2以截面图示出在图1中示出的激光雷达传感器1。在此可以看出,在激光雷达传感器1内的一侧上布置有光学发射单元13和光学接收单元14。因此,通过光学发射单元13将激光雷达传感器1的扫描光束16、尤其是激光束投射到光学器件15上并且由该光学器件反射到偏转单元17上。偏转单元17在此是旋转镜系统,该旋转镜系统在预给定的旋转方向上转动。扫描光束16被投射到旋转镜系统的旋转镜并且由该旋转镜偏转,并且,通过视窗2将扫描光束16发射到激光雷达传感器1的周围环境中。在此,由激光雷达传感器1检测例如-60
°
至 60
°
的视野。因此,激光雷达传感器1具有以下视野,该视野从激光雷达传感器1的前侧7开始对称地延伸。在此可以看出,视窗2并且因此前侧7也被完全使用,以便不仅通过视窗2发射-60
°
至 60
°
的角度的扫描光束16并且同时使得清洁单元3能够停留在停放位置11中,而无需中断扫描光束16。
43.为了完整起见,参考这一点:在激光雷达传感器1的周围环境中的对象上反射的、反射的扫描光束16通过偏转单元17(即通过旋转镜)被反射到光学器件15上并且通过该光学器件被反射到光学接收单元14上。反射的扫描光束16在此沿着发射的扫描光束16的光学路径到达光学器件15。以相应的方式,当该清洁单元位于停放位置11中时反射的扫描光束16因此也不会由清洁单元3中断。
44.在此,在图2中示出了激光雷达传感器1的光学中心18。光学中心18在此是这样的点,当从外部通过视窗2观察到激光雷达传感器1时,激光雷达传感器1的扫描光束16从该点出发。在此可以看出,激光雷达传感器1的光学中心18相对于激光雷达传感器1的几何中点有移位。因此,激光雷达传感器1具有纵向轴19,该纵向轴平行于前侧7延伸并且与竖轴4垂直。沿着该纵向轴19,光学中心18并不位于激光雷达传感器1的中心,而是在纵向轴19上远离激光雷达传感器1的几何中点。由此,当该清洁单元位于停放位置11时在前侧7上实现了
用于清洁单元3的足够空间。
45.换言之,这意味着,光学中心18在观察激光雷达传感器1的前侧7时相对于前侧7的中心向右或向左移位。在此,该移位也是沿着纵向轴19的移位。尤其是,在此在清洁单元3的停放位置11的侧上,距前侧7的一个边缘的距离大于距前侧7的与该边缘相对置的边缘的距离。应指出,纵向轴19在图2中被示例性地示出并且仅由其取向限定。因此,光学中心18在纵向轴19的相应视图中位于纵向轴19上。
46.可选地,激光雷达传感器1具有从激光雷达传感器1的前侧7出发不对称地延伸的视野。即,激光雷达传感器1能够具有定向的观察方向。这意味着,激光雷达传感器1的视野在一个方向上能够比在另一个方向上更大。
47.在图2中示出的激光雷达传感器1的视图中,偏转单元17的旋转方向示出为右旋的。在此能够配置进行转动的偏转单元17的旋转方向。这意味着,旋转方向也能够配置为左旋的。由此实现了,扫描方向(即扫描光束16的运动方向)能够反转。因此,当激光雷达传感器1倒置安装时,能够保持激光雷达传感器1的扫描光束16相对于车辆的运动方向,其方式是,使进行转动的偏转单元17的旋转方向反转。
48.因此,图2示出了激光雷达传感器1的安装原理。在此,视野的中心侧向于传感器中心,并且在视窗2上存在“死角”区域,清洁单元3能够停放在该区域上。该安装优选对称地在车辆100上、例如在挡泥板中进行。清洁单元3停放在“凹槽(nische)”中。车辆100的车身能够在激光雷达传感器1的视野方面进行优化。车辆100的车身的相应另一侧是镜像的并且不必特地优化。车身(例如挡泥板)的内部结构也能够对称地设置,包括电缆引导、冷却空气引导等。
49.参考图1。激光雷达传感器1的带有视窗2的前侧7如此成形,使得其关于垂直于竖轴4的对称平面9对称。因此,前侧7的上半部与前侧7的下半部对称。由此实现了,无论将第一侧5还是第二侧6用作激光雷达传感器1的上侧,激光雷达传感器1的外貌在其安装状态下都是不变的。
50.为了实现激光雷达传感器1的固定,激光雷达传感器1具有支架10。这例如实现了将激光雷达传感器1固定在车辆上。支架10如此布置在激光雷达传感器1的壳体上,使得其关于垂直于竖轴4的对称平面9对称。激光雷达传感器因此能够固定在车辆100的车身上,该车身也对称地实施。
51.在该实施方式中,支架10具有一个中心的保持点10a和两个偏心的保持点10b、10c。在此,中心的保持点10a如此布置,使得它位于对称平面9上,并且两个偏心的保持点10b、10c如此布置,使得它们对称地布置在对称平面9的不同侧上。对称平面9在此是同一个对称平面9,其也将前侧7分成彼此对称的两个半部。关于激光雷达传感器1的对称性应指出:激光雷达传感器1的结构作为整体不一定必须是对称的。因此,例如激光雷达传感器1的连接部12能够在后侧8上不对称地实施,并且,光学发射单元13和光学接收单元14以及光学器件15也能够关于对称平面9不对称。连接部12(例如一个或多个插拔连接器)优选在激光雷达传感器1的外边缘上,以便实现简单的操纵。
52.在图3和图4中再次示出了保持点10a、10b、10c。在此,在图3中示出激光雷达传感器1的侧视图。可以看出,第一保持点10a布置在对称平面9上,该对称平面在第一侧5和第二侧6之间的一半距离处平行于第一侧5和第二侧6地穿过激光雷达传感器1。此外,从图3中可
以看出,激光雷达传感器1的后侧上的另一个保持点10d布置在对称平面9上。后部的另一个保持点10d能够关于激光雷达传感器1的中心轴不对称。
53.在图4中示意性地示出两个偏心的保持点10b、10c的布置。因此,第一偏心的保持点10b与第二偏心的保持点10c以距对称平面9相同的距离布置。尤其,偏心的保持点10b、10c和中心的保持点10a的组合是有利的。这同样在图4中示意性地示出出。尤其是通过偏心的保持点10b、10c能够避免激光雷达传感器1的扭转。同时,通过中心的保持点10a简化了激光雷达传感器1的固定,并且,通过共同撑开一个三角形的保持点的组合实现了激光雷达传感器1在其固定后的稳定布置。
54.激光雷达传感器1设置用于接收同步信号,该同步信号实现了激光雷达传感器1的扫描过程与预给定的时间频率和/或预给定的相位的同步。同步信号例如经由在激光雷达传感器1的后侧8上的连接部12被接收。在此有利的是,同步信号承载预给定激光雷达传感器1应同步到的时间频率和/或相位的信息。以这种方式,在使用激光雷达传感器1中的多个时,能够使两个激光雷达传感器1的扫描光束16的当前位置彼此调谐,使得能够避免扫描光束的重叠和对激光雷达传感器1的刺激。
55.激光雷达传感器1如此构型,使得它特别优选地能够使用在与多个结构相同的激光雷达传感器1结合的车辆上。在图5中示出了两个根据本发明的激光雷达传感器1在一个车辆100上的示例性布置。在此,在图5中示出了车辆前部,其中,相应于前述激光雷达传感器1的第一激光雷达传感器20布置在车辆前部的右侧,并且,与第一激光雷达传感器20结构相同的第二激光雷达传感器21布置在车辆100的车辆前部的左侧。在此,两个激光雷达传感器20、21示例性地布置在车辆100的前轮101、102的前方。因此,激光雷达传感器20、21例如布置在车辆100的保险杠中。可以看出,第一激光雷达传感器20具有指向车辆100的右侧的视野30。以相应的方式,第二激光雷达传感器21具有指向车辆100的左侧的视野31。第一激光雷达传感器20在此如此布置,使得第一激光雷达传感器20的第一侧5和激光雷达传感器中的另一个(即第二激光雷达传感器21)的第二侧6布置在共同的侧上。因此,在图5可看到第一激光雷达传感器20的第一侧5和第二激光雷达传感器21的第二侧6。两个激光雷达传感器20、21的清洁单元3位于停放位置11中并且在车辆100的车辆尾部的方向上放置在相应相关的激光雷达传感器1的前侧7上。因此,使用了清洁单元3在图5中所在的、相同的停放位置11。
56.此外有利的是,在一个车辆100上布置多个结构相同的根据本发明的激光雷达传感器1。在图6中示出示例性的传感器布置。在此,在车辆100上除了第一激光雷达传感器20和第二激光雷达传感器21还布置有第三激光雷达传感器22、第四激光雷达传感器23、第五激光雷达传感器24和第六激光雷达传感器26。在此,第一至第六激光雷达传感器20至26是结构相同的激光雷达传感器。可以看出,激光雷达传感器20至26不一定必须平行于车辆100的纵向轴取向。相反,各个激光雷达传感器20至25能够任意地布置在车辆100上,其中,当它们关于车辆100的纵向轴对称地布置在车辆100上时,保持了美学视觉效果以及最佳的空气动力学特性。因此,激光雷达传感器1例如能够布置在图6中示出的位置中的任一个上,并且能够保持车辆100的对称的整体图像。
57.因此,通过激光雷达传感器1实现了传感器,该传感器如此构造,使得它也能够倒置地安装。由此能够省去激光雷达传感器1的、用于实现用于停放位置11的空间的加宽,并
且在车辆100中的构造能够对称地实现。
58.为此有利的是,激光雷达传感器1在车辆中的固定(固定点)也关于z轴、即关于竖轴4对称地设计,理想情况下位于激光雷达传感器1的高度的一半上。
59.在激光雷达传感器1的光学中心18的水平方向上的非中心方位能够附加地帮助改进车辆集成,尤其是关于视野。
60.为了在多个所述激光雷达传感器1中布置在一个车辆上时最小化激光雷达传感器1之间的相互干扰,将激光雷达传感器1同步到共同的时间频率并且如此协调偏转单元17关于车辆的运动,使得激光雷达传感器1在任何时刻看向不同的方向,并且运动不会交叉。在带有进行转动的偏转部的可翻转的激光雷达传感器1中,为此使偏转单元17关于激光雷达传感器1的转动方向可翻转,并且,在车辆中,在车辆右侧上的激光雷达传感器1配置成具有与在车辆左侧上的激光雷达传感器1不同的旋转方向。
61.有利地,如此同步偏转单元17的运动,使得在关于车辆100的相同方向上的扫描以均匀的时间间隔进行。因此,例如在每个激光雷达传感器1的重复率为100毫秒的情况下,激光雷达传感器1中的两个如此配置,使得这两个激光雷达传感器1以每50毫秒交替地扫描朝向车辆前部的区域除了上述公开内容之外,还明确参考了图1至图6的公开内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。