1.本发明涉及一种视线追踪系统,更详细地,涉及一种利用智能眼镜而改善目标检测准确度和操作方便性提升的视线追踪系统。
背景技术:
2.最近,作为虚拟现实(virtual reality,“vr”)、增强现实(augmented reality,“ar”)或者混合现实(mixed reality,“mr”)的应用领域,医疗以及保健备受瞩目。随着因高龄化时代的到来和竞争深化导致的心理疾病等医疗服务的需求在增加,为了应对这种问题,作为对医疗专业人士的培养以及心理治疗的替代方案,开始兴起利用智能眼镜的vr、ar以及mr技术。尤其是,摆脱以往限制使用于治疗创伤的情况,vr的使用范围扩大到手术、治疗、康复等整个医疗领域。利用vr,则可以实现虚拟患者或者器官而进行训练教育,医护人员可以在手术之前制定合适的计划并事先进行测试。
3.然而,所述vr、ar、mr技术一般是输入非常不方便。也可以使用一部分语音识别,但是相比以往利用视觉上的信息进行输入的计算机或者手机等的输入,vr、ar、mr技术的输入单元非常受限制。医护人员在进行机器手术、远程手术等时,为了参考患者的状态而时常发生需要查询图表或者患者的x-ray照片文件等需要的信息,或者需要输入简单的文字输入事项等进行处理,或者需要控制设备的情况,然而仅通过在以往的vr、ar、mr中提供的使用者接口,相当不方便。
4.因此,迫切要求在医疗用设备中,利用vr、ar、mr设备时,医护人员可以通过简单的方法方便控制文字输入或者设备的使用者接口。
5.一方面,本发明的背景技术是为了更加容易理解本发明而撰写的。不应理解为这是在认可本发明的背景技术中记载的事项作为现有技术而存在。
技术实现要素:
6.技术问题
7.本发明要解决的技术问题在于,提供一种通过改变随着使用者的视线输入的对象的大小、形态以及移动方向,能够提高使用者的操作方便性的智能眼镜的视线追踪系统。
8.另外,本发明要解决的技术问题在于,提供一种通过在智能镜片内设定使用者的视线范围,从而能够提高使用者的输入准确度以及凝视的准确度的智能眼镜的视线追踪系统。
9.另外,本发明要解决的技术问题在于,提供一种基于输入的对象,提供自动推荐词汇,从而能够有效缩短使用者的操作速度的智能眼镜的视线追踪系统。
10.本发明的技术问题不限于以上所提及的课题,尚未提及的其他课题可通过以下记载供本领域技术人员明确理解。
11.技术方案
12.为了解决如上所述课题,可以是根据本发明的实施例的智能眼镜的视线追踪系
统,包括:瞳孔感应部,通过内设于智能眼镜中的至少一个传感器,感应使用者的瞳孔;显示部,包括浮动有多个目标对象的智能镜片;视线追踪部,通过至少一个感应传感器追踪视线,获取对多个目标对象的使用者的视线状态信息;以及输入部,基于视线状态信息,将多个目标对象中使用者的视线停留一定时间以上的特定对象选为输入对象之后,执行输入,其中,输入对象构成为基于使用者的视线状态信息,大小、颜色以及移动方向中的至少一个发生变化。
13.另外,可以是视线状态信息包括使用者的瞳孔的移动以及使用者的眼睛是否开闭,基于使用者的视线状态信息,决定输入对象。
14.另外,可以是目标对象包括辅音、元音、词汇以及图像中的任一个。
15.另外,可以是智能镜片以中心点为基准分成四象限(four-quadrant),在四象限的各个区域各自浮动至少一个目标对象。
16.另外,可以是在四象限的各个区域浮动的目标对象是在一个循环(cycle)中一次性浮动多个,或者经过多个循环依次浮动。
17.另外,可以是目标对象以智能镜片的中心点为基准,彼此向不同的方向浮动,方向包括对角线方向、瞬时间方向、逆时针方向以及漩涡方向中的至少一个。
18.另外,可以是目标对象从智能镜片的一侧向另一侧平行浮动。
19.另外,可以是目标对象包括自动推荐词汇,自动推荐词汇在智能镜片一个一个浮动或者以列表形态弹窗显示。
20.另外,可以是自动推荐词汇基于使用者的关注度而按分级速度浮动,关注度是通过由使用者预设的关注项目、使用者的业务领域以及对目标对象的使用者的输入频率中的任一个来决定。
21.另外,可以是还包括:视线范围设定部,基于由视线追踪部追踪的视线追踪数据,设定使用者的视线范围,视线范围设定部包括四象限中经常暴露于使用者的视线中的至少两个区域。
22.另外,可以是显示部相比除去视线范围区域的区域,在视线范围区域浮动更多的目标对象。
23.一方面,可以是根据本发明的实施例的视线追踪方法,包括:通过瞳孔感应部感应使用者的瞳孔的步骤;通过视线追踪部追踪对在显示部浮动的多个目标对象的使用者的视线的步骤;获取对多个目标对象的使用者的视线状态信息的步骤;以及通过输入部,将多个目标对象中使用者的视线停留一定时间以上的特定对象选为输入对象之后,执行输入的步骤,其中,输入对象基于使用者的视线状态信息,大小、颜色以及移动方向中的至少一个发生变化。
24.另外,可以是输入对象以显示部的中心点为基准,向对角线方向、瞬时间方向、逆时针方向以及漩涡方向中的至少一个方向浮动。
25.另外,可以是对于目标对象,使用者的视线停留至少2秒时,选为输入对象,对于经选择的输入对象,当使用者的眼睛眨眼至少2次,或者具有特定单一肌肉或者肌肉群的特殊移动时,输入与经选择的输入对象相对应的信息。
26.另外,可以是使用者的视线停留至少2秒的情况包括:视线停留在目标对象周围,且基于对象的移动路线追踪2秒以上的情况,或者视线停留在目标对象周围,且追踪偏差角
度超过35的情况。
27.另外,可以是目标对象周围的游动偏差角度(fgr)为3以下。
28.另外,可以是输入对象包括:视线停留在目的对象周围,且基于目标对象的移动路线追踪1秒以上,并将视线事先移动至在对象的移动预测路线上偏差角度为45β以上的路线为止的情况。
29.一方面,可以是根据本发明的实施例的计算机可读记录介质,存储以下指令:通过瞳孔感应部感应使用者的瞳孔,通过视线追踪部追踪对在显示部浮动的多个目标对象的使用者的视线,获取对多个目标对象的使用者的视线状态信息,掌握通过输入部而所述多个目标对象中所述使用者的视线停留一定时间以上的特定对象被所述使用者决定为输入对象,从而作为输入处理,其中,输入对象基于使用者的视线状态信息,大小、颜色以及移动方向中的至少一个发生变化。
30.一方面,根据本发明的效果不限于以上示例的内容,更加多样的效果包含在本说明书内。
31.发明效果
32.本发明通过改变随着使用者的视线输入的对象的大小、形态以及移动方向,能够在vr、ar以及mr中显著提高使用者的输入操作的方便性。
33.另外,本发明通过在智能镜片内设定使用者的视线范围,能够提高使用者的输入的准确度以及凝视的准确度。
34.另外,本发明基于输入的对象,提供自动推荐词汇,从而能够有效缩短使用者的操作速度。
35.根据本发明的效果不限于以上示例的内容,更加多样的效果包含在本说明书内。
附图说明
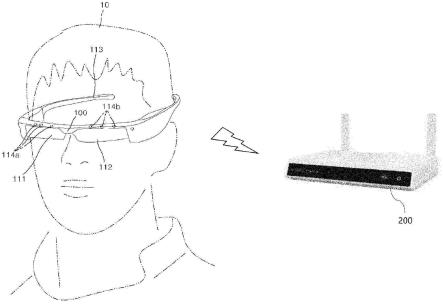
36.图1a是根据本发明的一实施例的视线追踪系统的概略图。
37.图1b是用于说明根据本发明的一实施例的智能眼镜的显示方式的图。
38.图2是根据本发明的一实施例的智能眼镜的构成图。
39.图3是用于说明根据本发明的一实施例的基于视线追踪的目标对象输入方法的流程图。
40.图4是用于说明根据本发明的一实施例的瞳孔感应过程的示例图。
41.图5a以及图5b是用于说明根据本发明的一实施例中利用视线的目标对象的输入过程的示例图。
42.图6是用于说明根据本发明的一实施例中利用视线的目标对象的输入过程的示例图。
43.图7是用于说明根据本发明的另一实施例中利用视线的自动完成对象的输入过程的示例图。
44.图8是示出根据本发明的又一实施例的自动完成列表的示例图。
45.图9是用于说明根据本发明的实施例的视线传感器的示例图。
46.图10是用于说明根据本发明的实施例的判断输入对象并决定为输入的过程的示例图。
具体实施方式
47.本发明的优点以及达成其的方法会与附图一起通过详细后述的实施例变得明确。然而,本发明并不限于以下公开的实施例,可以实施为彼此不同的多种形态,本实施例仅是用于使本发明的公开变完整,用于向本领域普通技术人员完整地告知发明的范畴而提供的,本发明仅由权利要求范围而定义。
48.为了说明本发明的实施例而在附图示出的形状、大小、比率、角度、数量等属于示例,因此本发明不限于示出的事项。另外,在说明本发明时,当判断为对相关公知技术的具体说明能够混淆本发明的要旨时,省略对其的详细说明。当使用本说明书上提及的“包括”、“具备”、“构成”等时,在没有使用“仅~”的情况下,可以增加其他部分。当用单数表达构成要素时,在没有特别明示性的记载事项时,包括包含复数的情况。
49.在解释构成要素时,即便没有另外明示性的记载,也应解释为包括误差范围。
50.本发明的多个实施例的各个特征可以是部分或者整体彼此结合或者组合,如本领域技术人员可以充分理解,可以在技术上多种联动以及驱动,各个实施例也可以是相对于彼此独立实施,也可以是作为相连关系一同实施。
51.以下,参考图1a至图2说明根据本发明的一实施例的智能眼镜的结构。
52.图1a以及图1b是根据本发明的一实施例的视线追踪系统的概略图。图2是根据本发明的一实施例的智能眼镜的构成图。
53.参考图1a,视线追踪系统可以包括智能眼镜100以及视线追踪服务器200。智能眼镜100以及视线追踪服务器200可以是通过无线通信,例如蓝牙、wifi等的近距离无线通信进行连接。然而,虽然在图1a的实施例中示出智能眼镜100和视线追踪服务器200为分离的状态,但智能眼镜100和视线追踪服务器200也可以安装在一个壳体内。当安装在一个壳体内时,智能眼镜100和视线追踪服务器200可以是有线连接。智能眼镜100可以是利用内设的至少一个传感器感应以及追踪视线,另外可以选择在显示部103的画面上浮动(floating)的目标对象(target object),输入与该目标对象相关的信息的装置。
54.如图1a所示,智能眼镜100可以由智能镜片111、112、眼镜支架113、瞳孔感应部101以及视线追踪部102构成。
55.在本发明中,智能眼镜100可以是,例如,如图1b所示,在显示面板(第一镜片以及第二镜片)的微型显示部10投影的画面通过所述第一以及第二镜片发生反射而被眼睛看到,通过该方式供使用者注视。然而,虽然在本说明书中,以上述结构的显示器为中心进行了说明,但不限于此。也可以是应用hmd显示器的同时,通过透视(see-through)模式,利用智能眼镜100的摄像头拍摄外部画面之后,通过vr画面与信息画面进行组合,从而供注视的形态。或者,也可以是摄像头拍摄患者的患处或者手术部位的同时,与智能眼镜100联动,从而在拍摄的画面上显示目标对象。
56.另外,智能眼镜100也可以是如图1b所示,利用配置在智能眼镜100的一区域(例如,中央部上端)的微显示器(microdisplay)10以及棱镜(prism)来显示像14。具体地,当微显示器10通过配置在正面的镜片11照射像时,照射的像可以通过镜片11到达智能眼镜100的显示面板12的一区域之后,通过粘接在显示面板12的一面上的分离器(splitter)13而发生像的全反射(total reflection)。换句而言,配置在两侧镜片的中央的微显示器10可以在向左侧镜片和右侧镜片照射像之后,利用分离器的全反射特性,向左眼以及右眼的前面
部显示立体形状的虚拟的图像(或者像14)。
57.显示部103作为显示多个目标对象的结构,可以包括在智能眼镜100的正面部配置在与使用者的右眼以及左眼相对应的位置上的第一镜片111以及第二镜片112。在本说明书中,为了方便说明,第一镜片111以及第二镜片112被统称为“智能镜片”。一方面,智能镜片111、112应被解释为包括所有在vr的画面以及谷歌眼镜中利用微显示器以及棱镜来向眼睛照射光的显示器的概念。
58.其中,目标对象作为使用者想要通过视线输入的信息,可以包括具有文字或者图像形态的多个对象。例如,目标对象可以是各个字母、词汇形态、图标形态或者图像本身。
59.此时,目标对象的特征为,根据使用者的视线状态信息,大小、颜色、形态以及移动方向中的至少一个发生变化,从而在显示部103浮动。在后续说明基于视线的目标对象的各种变化。
60.另外,目标对象可以是根据实施例在一个镜片浮动辅音,在另一个镜片浮动元音。
61.另外,在本发明中,视线状态信息可以是指使用者的瞳孔211的移动以及使用者的眼睛是否开闭。
62.参考图1a,瞳孔感应部101作为感应使用者的瞳孔211的结构,可以沿着智能眼镜100的正面部,即固定有第一镜片111的镜框的边缘设置有多个。此时,瞳孔感应部101的特征是,由至少一个传感器单元114构成。传感器单元114可以包括左眼传感器单元114a以及右眼传感器单元114b。参考图9,传感器单元114可以是,例如,向瞳孔照射不破坏视力的红外线之后,可以特定通过瞳孔在眼球的眼底反射的距离d1 d2。在该情况下,反射距离可以被细分为从眼底到瞳孔的距离d1以及从眼球表面到传感器单元114的距离d2。在该情况下,可以利用通过多个传感器求取的各个距离d1以及d2,来特定瞳孔的位置以及视线方向。通过图9所示的精密的视线感应,智能眼镜可以获取详细的瞳孔的位置以及视线。
63.视线追踪部102为感应对在智能镜片的画面上浮动的多个目标对象的使用者的视线状态信息的结构,可以实时追踪(tracking)佩戴智能眼镜100的使用者的视线。如图1a以及图1b所示,视线追踪部102可以是沿着固定有第二镜片112的镜框的边缘平行配置。此时,视线追踪部102的特征为,包括至少一个传感器单元114b。
64.瞳孔感应部101以及视线追踪部102的位置不限于此,可以配置为内设于智能眼镜100的眼镜支架113或者镜框的至少一区域。例如,也可以配置在智能眼镜100的侧面部,或者直接配置在智能眼镜100的显示部103。在后续说明瞳孔感应部101以及视线追踪部102的具体操作。
65.输入部104是基于视线状态信息来执行对目标对象的输入的结构。具体地,利用视线追踪部102实时获取使用者的视线状态信息,从而输入部104将多个目标对象中使用者的视线停留一定时间以上的特定对象选为输入对象,当进一步存在眼睛或者眼周单一肌肉或者肌肉群动作的情况时(例如,闭眼一定时间以上或者参考时间期间眨眼一定次数以上时),对该对象执行输入。
66.推荐词汇提供部105是当输入有至少两个目标对象时,以浮动形态或者弹窗列表形态提供以该字母开头的自动推荐词汇。在后续中说明与此相关的详细内容。
67.控制部106可以执行对瞳孔感应部101、显示部103、视线追踪部102、输入部104以及推荐词汇提供部105的整体操作的功能。
68.以下,参考图3至图6,详细说明对根据本发明的一实施例的目标对象的视线输入方法。
69.图3是用于说明根据本发明的一实施例的基于视线追踪的目标对象输入方法的流程图。图4是用于说明根据本发明的一实施例的瞳孔感应过程的示例图。图5a以及图5b是用于说明根据本发明的一实施例中利用视线的目标对象的输入过程的示例图。图6是用于说明根据本发明的一实施例中利用视线的目标对象的输入过程的示例图。
70.首先,通过瞳孔感应部101,感应使用者的瞳孔(s100)。
71.参考图4,使用者在佩戴智能眼镜100的状态下,执行探索通过智能眼镜100的第一镜片111和第二镜片112显示的刻度的中心点的动作。在视线追踪部102追踪视线之前,需要通过瞳孔感应部感应瞳孔的聚焦的过程以能够测定基本的眼睛的移动。
72.具体地,瞳孔感应部101感应使用者瞳孔是否对使用者的智能眼镜111、112的中心点c2聚焦(focusing)之后,当使用者的瞳孔聚焦在中心点c2时,准备执行下一步骤。然而,当使用者的瞳孔注视其他点c1而不是中心点c2时,还可以提供向导消息以使使用者能够通过利用内设于智能眼镜100的扬声器的语音输出或者利用智能镜片111、112的语句输出探索中心点c2。
73.接着,通过视线追踪部102实时追踪使用者的视线(s200)。接着,通过视线追踪部102的实时追踪,获取对在显示部103浮动的多个目标对象的使用者的视线状态信息(s300)。接着,基于获取的视线状态信息,执行对目标对象的输入(s400)。
74.首先,在本发明中,作为基础,多个目标对象500是在第一镜片111以及第二镜片112两侧浮动以能够在受限的时间内向使用者提供多的对象。然而,多个目标对象500浮动的方式不限于此。例如,也可以是从第一镜片111或者第二镜片112的一侧方向向另一侧方向移动着浮动。
75.另外,多个目标对象500可以是在一个循环(1cycle)中通过两侧镜片111、112浮动(floating)多个。由此,使用者可以缩短输入使用者的需求所消耗的时间。或者,多个目标对象500也可以是经过多个循环(n cycle)依次浮动。由此,使用者可以更加准确地输入使用者的需求。
76.参考图5a(a),通过第一镜片111以及第二镜片112注视的图像可以以特定位置为基准被分为四象限(four-quadrant),所述第一镜片111以及第二镜片112配置为与使用者的左眼以及右眼各自对应。例如,通过第一镜片111以及第二镜片112注视的画面包括位于左侧上端的第一区域a1、位于右侧上端的第二区域a2、位于左侧下端的第三区域a3、位于右侧下端的第四区域a4。
77.参考图5a(a),在各个区域a1、a2、a3、a4浮动的多个目标对象500可以在中心点向顺时针方向远离的同时,以旋涡形状旋转。然而,目标对象500浮动的方式不限于此,可以变形为各种方式。例如,也可以根据使用者的视线状态信息或者目标对象500的重要度,如图5b(c)所示,向逆时针方向旋转,也可以浮动为在中心点向对角线方向散开。或者,也可以是向各个角度散开的同时浮动。
78.参考图5a(a),使用者凝视在第二区域a2浮动的字母“e”一定时间以上之后,输入部104可以选择该字母“e”作为输入对象501。此时,为了与使用者单纯移动视线的同时注视与输入无关的目标对象的情况进行区分,优选为,一定时间是指至少2秒。即,将使用者的视
线停留至少2秒的目标对象500判断为输入对象501。以下,一同参考图10说明与此相关的具体说明。
79.然而,使用者的视线在目标对象停留至少2秒的情况(作为输入对象501判断的情况)还可以包括:视线停留在目标对象周围,且基于目标对象的移动路线追踪2秒以上的情况。其中,目标对象周围是指游动偏差角度fgr为3β以下的点。此时,通过假设使用者注视游动的目标对象中心并连接的虚拟的线和使用者实际注视目标对象周围时的虚拟的线之间的角度,定义游动偏差角度fgr。
80.即,特征为,以目标对象为基准位于各个角度方向,且在视线停留在游动偏差角度为3β以下的点的状态下,视线沿着目标对象的移动路线移动2秒以上时,视线停留至少2秒。
81.另外,使用者的视线在目标对象停留至少2秒的情况可以包括:视线停留在目标对象周围,且对所述目标对象的追踪偏差角度tgr为35以上的情况。其中,追踪偏差角度tgr可以是通过从以使用者的眼睛为基准开始停留视线的追踪起始点到完成追踪的目前位置(视线停留的位置)为止的角度进行定义。
82.另外,当对输入对象501决定输入时,还可以包括:以所述目标对象的移动路线为基础,追踪所述目标对象1秒以上,并将视线事先移动至在所述目标对象的移动预测路线上偏差角度45β以上的路线为止的情况。
83.当使用者在智能镜片111、112浮动的多个目标对象500中,凝视想要输入的字母一定时间以上时,如图5a(b)所示,输入对象501的大小可以增加为相比其他目标对象具有显著大的大小。通过所述操作,使用者知道目标对象500被选为输入对象501的事实。即,特征为通过使用者(或者利用视线追踪系统的使用者)决定输入对象501。
84.此时,可以包括使用者以无意识状态凝视目标对象一定时间以上的情况,因此为了执行对大小增加的输入对象501的输入,可以进一步要求动作。
85.例如,可以要求对所述输入对象501眨眼至少2次或者闭眼一定时间以上的动作。然而,其中,眨眼至少2次是指在参考时间内眨眼2次以上。或者,可以要求对输入对象501,特定单一肌肉或者肌肉群(group)特殊动作。其中,特定单一肌肉或者肌肉群是指眼球附近的肌肉,可以是眼球肌、眼外肌、外眼肌、上直肌、下直肌、内侧直肌、外侧直肌等。
86.由此,使用者输入字母“e”之后,如图5b(c)所示,可以向配置在第一区域a1的上端的输入窗502输入字母“e”。此时,当使用者错误输入时,也可以利用配置在输入窗502内的删除按钮503,删除字母。
87.接着,参考图5b(c)、(d),则使用者注视一定时间以上的输入对象501可以是大小增加的同时,颜色发生变化。此时,输入对象501的颜色也可以是仅字母颜色发生变化,也可以如文字的阴影,字母周围的颜色发生变化。另外,可以向输入窗502输入作为输入对象的字母“x”。由此,具有使用者可以更加容易识别自己凝视的目标对象500的效果。
88.参考图6,视线范围设定部可以基于从视线追踪部102追踪的视线追踪数据来决定使用者的视线范围sr。例如,如图5a至图5b所示,可以知道使用者主要凝视第一镜片111的右侧区域,即第二区域a2、第四区域a4和第二镜片112的左侧区域,即第一区域a1、第三区域a3。由此,使用者的视线范围被决定为使用者的视线的中央部。
89.本发明可以通过设定使用者的视线范围,在对使用者熟悉的视线范围频繁暴露目标对象,从而提高操作的方便性以供使用者能够更加容易选择。
90.另外,可以在视线范围区域频繁浮动目标对象,或者重复浮动。重复浮动目标对象是指,在浮动多个目标对象的一个循环(cycle)内,浮动至少2个相同的文字。
91.在视线范围区域重复浮动目标对象,从而具有可以提高使用者的凝视准确度的效果。换句而言,在视线范围区域也可以存在使用者方便凝视的特定位置,因此当重复浮动重复的至少2个文字时,可以提高输入的准确度。
92.图7是用于说明根据本发明的另一实施例利用视线的自动完成对象的输入过程的示例图。
93.如图7所示,在第一镜片111的输入窗输入到“exp”时,在智能镜片111、112可以通过推荐词汇提供部105浮动以“exp”开头的自动推荐词汇。其中,自动推荐词汇可以是由提供至少两个字母时提供的自动完成型词汇进行定义,也可以由佩戴智能眼镜100的使用者基于初期设定的基本信息提供的使用者定制式推荐词汇进行定义。
94.具体地,可以在第一镜片111浮动诸如r、u、p、s、t等的多个目标对象,在第二镜片112浮动诸如“explore”、“exploring”、“explain”、“expect”的自动推荐词汇。图7中示出自动推荐词汇在第二镜片112浮动的情况,然而可以在第一镜片111或者全部的智能镜片111、112浮动。
95.参考图7,可以知道作为输入对象701输入“explore”。此时,虽然示出在输入窗a11仅输入一个词汇,然而也可以输入多个选择事项。一方面,在浮动自动推荐词汇的步骤中决定输入对象时,决定的输入对象可以从在下一步骤浮动的目标对象中排除在外。
96.另外,浮动的自动推荐词汇可以根据使用者的关注度而彼此以不同的速度浮动。例如,使用者的关注度高的词汇可以被缓慢浮动,关注度低的词汇被快速浮动。其中,关注度可以是基于使用者在初期设定的基本信息(例如,使用者的关注项目、使用者的业务领域等)进行设定,可以基于使用者的输入频率进行设定。
97.因此,本发明可以通过向使用者提供自动推荐词汇,省略一个一个输入目标对象的过程,因此具有可以有效缩短业务速度的效果。
98.图8是示出根据本发明的又一其他实施例的自动完成列表的示例图。
99.参考图8,在第一镜片111的输入窗输入到“exp”时,在智能镜片111、112可以通过推荐词汇提供部105以列表形态弹出(pop-up)以“exp”开头的自动推荐词汇。
100.如图8所示,输入部104可以在随着使用者的视线弹出的自动完成列表800中,作为输入对象801输入“explore”。
101.此时,弹出(pop-up)自动完成列表的镜片可以是通过使用者而容易进行改变。另外,当在自动完成列表中推荐的自动推荐词汇多时,也可以在全部的智能镜片111、112中弹出。
102.因此,本发明通过向使用者以列表形态提供自动推荐词汇,从而可以防止使用者的不必要的视线移动。由此,具有使用者可以有效进行业务的优点。
103.以上,参考附图更加详细说明了本发明的实施例,然而本发明不一定局限于这种实施例,可以在不脱离本发明的技术构思的范围内进行各种变形。因此,本发明中公开的实施例是用于说明本发明的技术构思而不用于限定,本发明的技术构思的范围不受所述实施例的限定。因此,应理解以上说明的实施例在所有面上属于示例而不用于限定。本发明的保护范围应是通过权利要求书进行解释,而且应解释为与其均等范围内的所有技术构思包含
在本发明的权利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
