1.本发明属于磁粒子功能成像技术领域,具体涉及一种基于全空间编码的磁粒子断层扫描方法。
背景技术:
2.磁粒子成像是一种没有电离辐射的功能成像技术。磁粒子是超顺磁性氧化铁纳米颗粒,其尺寸范围为10nm~60nm。磁粒子通过肝脏进行代谢,对肾脏没有负担,是一种更为安全的示踪剂。并且,磁粒子成像不需要借助x射线帮助成像,没有电离辐射的危害。磁粒子成像的基本原理是成像目标内分布的磁粒子可随外部激励磁场的变化产生出高频的谐波信号;通过接收线圈采集这些信号,利用图像重建的方法便可以得到磁粒子浓度的空间分布图像,该图像便可显示出成像目标的内部影像。
3.现有的磁粒子成像技术中,大多采用梯度线圈在具有磁粒子浓度分布的成像目标中产生一个点状或线状的磁场自由区,向该磁场自由区施加额外的激励磁场,可使成像目标内部位于该磁场自由区内的磁粒子被驱动着产生高频的谐波信号,使用接收线圈来感应、接收这些信号,可以得到感应电压,基于该感应电压可以获得成像目标内一个点或一个线的磁粒子浓度。通过不断地移动该磁场自由区进行扫描,可以获取整个成像目标的磁粒子浓度的分布信息,从而基于该分布信息为成像目标实现磁粒子成像。
4.然而,为了确保成像图像的分辨率,现有的磁粒子成像技术中的这种通过移动磁场自由区对成像目标进行扫描的方式,需要将磁场自由区设置得足够小,这就使得对整个成像目标进行成像需要扫描很多次,几乎是以图像的分辨率为步进来进行扫描,扫描效率较为低下。此外,长时间进行扫描又会增大磁粒子的弛豫效应,使得磁场自由区的移动发生滞后和延迟,造成最终的成像图像变得模糊,从而制约了现有磁粒子成像技术对大尺寸成像目标进行扫描成像的可能。因此,现有磁粒子成像技术在20cm的视野下,图像分辨率只能达到5mm,目前仅能应用于小老鼠般大小(3~5cm)的目标的成像。
技术实现要素:
5.为了使磁粒子成像技术能够对大尺寸成像目标实现扫描成像,本发明提供了一种基于全空间编码的磁粒子断层扫描方法。
6.本发明要解决的技术问题通过以下技术方案实现:
7.一种基于全空间编码的磁粒子断层扫描方法,包括:
8.多次执行一线圈姿态调控步骤,并在每次执行所述线圈姿态调控步骤后多次执行一磁场分布调控步骤,以及在每次执行所述磁场分布调控步骤后执行一信号采集步骤,得到用于磁粒子成像的全空间编码的扫描数据;其中,
9.所述信号采集步骤,包括:利用一对激励线圈向成像目标所在的成像区域施加空间非均匀、非线性分布的交变激励场,同时通过一对接收线圈采集所述成像目标响应于所述交变激励场的响应信号,并提取所述响应信号的目标特征;其中,所述响应信号由所述成
像目标中的所有磁粒子被激发出的信号叠加而成;所述目标特征包括:尖峰幅值和/或3倍基频谐波分量;
10.所述磁场分布调控步骤,包括:调整所述激励线圈上施加的交流电流的幅度,以调整所述交变激励场的空间分布状态;
11.所述线圈姿态调控步骤,包括:调整所述激励线圈相对于所述成像目标的空间姿态。
12.可选地,所述一对激励线圈包括:一对圆形的霍姆霍兹发射线圈;所述一对接收线圈包括:一对圆形的霍姆霍兹接收线圈;其中,两个所述霍姆霍兹发射线圈分别靠近两个所述霍姆霍兹接收线圈对称放置且四者的轴向方向重合,形成位置相对的两组收发线圈;所述成像目标位于所述两组收发线圈的中点,所述两组收发线圈能够以所述成像目标的中心为圆心做不同圆周轨迹的运动,每个圆周轨迹内的运动过程均包括多个停留点位;
13.所述改变所述激励线圈相对于所述成像目标的空间姿态,包括:
14.改变所述两组收发线圈沿当前圆周轨迹做运动时的停留点位,或者当遍历完当前圆周轨迹内的各个停留点位时切换至下一圆周轨迹。
15.可选地,所述一对激励线圈为多对平行激励导线中的一对;所述多对平行激励导线依附于一圆筒结构分散排布,每对平行激励导线所在的平面均穿过所述圆筒结构的中线;所述圆筒结构能够围绕所述成像目标的中心进行不同角度的转动,以带动所述多对平行激励导线按不同圆周轨迹进行分布;所述一对接收线圈包括:一对圆形霍姆霍兹线圈,分别位于所述圆筒结构的两个底面;
16.所述改变所述激励线圈相对于所述成像目标的空间姿态,包括:
17.切换所述多对平行激励导线按当前圆周轨迹进行分布时所打开的一对平行激励导线,或者在遍历完当前圆周轨迹下的各对平行激励导线时切换至下一圆周轨迹。
18.可选地,所述圆周轨迹包括:
19.所在的平面平行于三维坐标系下的第一平面的第一圆周轨迹、所在的平面与所述第一平面之间有夹角的第二圆周轨迹、所在的平面与三维坐标系下的第二平面之间有夹角的第三圆周轨迹,以及所在的平面与所述第一平面、所述第二平面均有夹角的第四圆周轨迹;其中,所述第一片面为三维坐标系下的yz平面、xz平面或者xy平面,所述第二平面为所述yz平面、xz平面以及xy平面三者中非所述第一平面的平面。
20.可选地,所述利用一对激励线圈向成像目标所在的成像区域施加空间非均匀、非线性分布的交变激励场,包括:向一对激励线圈施加同向交变电流;
21.所述调整所述激励线圈上施加的交流电流的幅度,包括:
22.按照预设的调整步进,增大一个所述激励线圈中的电流幅度一次,并同步减少另一个所述激励线圈中的电流幅度一次,且在电流幅度调整后维持半个余弦振荡周期。
23.可选地,根据所述扫描数据为所述成像目标进行磁粒子成像的方式包括:
24.针对每个圆周轨迹内的每个停留点位,根据在该停留点位上提取的目标特征以及系统矩阵,重建出对应于该停留点位的、包含所述成像目标的磁粒子浓度信息的一维投影分布数据;其中,所述系统矩阵用于表征单位浓度的磁粒子在所述交变激励场作用下的响应信号的目标特征的空间分布;
25.针对每个圆周轨迹,根据该圆周轨迹内各个停留点位的一维投影分布数据,利用
滤波反投影重建的方法,重建出所述成像目标沿对应的成像方向投影的二维磁粒子浓度分布图像;其中,每个圆周轨迹对应的成像方向垂直于该圆周轨迹所在的平面。
26.可选地,根据所述扫描数据为所述成像目标进行磁粒子成像的方式包括:
27.针对每个圆周轨迹内打开的一对平行激励导线,根据打开该对平行激励导线时所提取的目标特征以及系统矩阵,重建出对应于该对平行激励导线的、包含所述成像目标的磁粒子浓度信息的一维投影分布数据;其中,所述系统矩阵用于表征单位浓度的磁粒子在所述交变激励场作用下的响应信号的目标特征的空间分布;
28.针对每个圆周轨迹,根据该圆周轨迹内对应于各对平行激励导线的一维投影分布数据,利用滤波反投影重建的方法,重建出所述成像目标沿对应的成像方向投影的二维磁粒子浓度分布图像;其中,每个圆周轨迹对应的成像方向垂直于该圆周轨迹所在的平面。
29.可选地,根据所述扫描数据为所述成像目标进行磁粒子成像的方式,还包括:
30.根据所述成像目标沿各成像方向的二维磁粒子浓度分布图像,利用层析合成的方法,重建出所述成像目标在三维空间的磁粒子浓度分布图像。
31.可选地,所述磁粒子断层扫描方法还包括:
32.当执行所述信号采集步骤时,利用屏蔽线圈产生屏蔽磁场,以饱和约束所述成像区域以外的区域中存在的磁粒子。
33.可选地,所述磁粒子断层扫描方法还包括:在每次执行所述信号采集步骤的过程中,在提取目标特征之前,对所采集的响应信号进行反卷积处理,以减轻因磁粒子弛豫效应导致的信号形变。
34.可选地,所述磁粒子断层扫描方法还包括:
35.在每次执行所述信号采集步骤的过程中,提取并记录所采集的响应信号的信号面积;根据所记录的信号面积对所述扫描数据中的目标特征进行校正。
36.可选地,所述磁粒子断层扫描方法还包括:
37.在每次执行所述信号采集步骤的过程中,提取并记录所采集的响应信号的半值全宽;根据所记录的半值全宽确定扫描过程中的所述交变激励场是否存在异常。
38.本发明提供的基于全空间编码的磁粒子断层扫描方法中,信号采集步骤中给成像区域施加的是空间非均匀、非线性分布的交变激励场,故而成像目标中不同位置处的磁粒子感受到的磁场强度是不同的;又由于在交变激励场激励下,磁粒子响应的信号的尖峰与磁粒子浓度和激励磁场强度成正比,3倍基频谐波分量也与磁场强度成一定的非线性关系、并与磁粒子浓度成正比,故而响应信号的这两种目标特征可以作为磁粒子成像的有效参数。在此基础上,本发明在信号采集步骤中采集的响应信号,是成像目标中的所有磁粒子被激发出的信号叠加而成的,即成像目标所在的全空间中的所有磁粒子都会对采集的响应信号有贡献;其中,通过调控磁场的空间分布状态再相应地采集响应信号,可实现一维空间编码,通过调控激励线圈相对于成像目标的空间姿态再相应地采集响应信号,可实现二维乃至三维空间编码;由此,整个扫描过程中采集的所有响应信号可以作为磁粒子成像的全空间编码的扫描数据,从而实现磁粒子成像。综上可见,本发明中的扫描方式无需设置磁场自由区,也无需对磁场自由区进行位置变更;这样,成像视野无需如现有技术那样受磁场自由区大小和活动范围的限制,从而可以提高成像视野,使得磁粒子成像技术能够对大尺寸成像目标实现扫描成像,如满足对人体目标进行成像所需的20cm~50cm的扫描视野。并且,不
设置磁场自由区便可以省略掉构建选择场和聚焦场所需的线圈以及所相应耗费的功耗,使得成像设备的规模和功耗都会有所降低。此外,与现有技术中几乎以成像图像的分辨率为步进执行扫描的方式相比,本发明中仅需若干次调控整个交变激励场的非均匀分布状态以及若干次调整激励线圈相对于成像目标的空间姿态即可,这种扫描方式所需耗费的时长远小于现有技术,时效性较高,可有效减轻磁粒子的弛豫效应,使得成像结果更为清晰。
39.以下将结合附图及对本发明做进一步详细说明。
附图说明
40.图1是本发明实施例提供的一种基于全空间编码的磁粒子断层扫描方法的流程图;
41.图2是实现本发明实施例提供的磁粒子断层扫描方法的一种扫描环境的示意图;
42.图3是图2所示的扫描环境中,两组收发线圈进行运动时所沿着的多个圆周运动轨迹;
43.图4(a)是基于图2所示扫描环境下获取的扫描数据进行二维成像的流程图;
44.图4(b)是基于图2所示扫描环境下获取的扫描数据进行三维成像的流程图;
45.图5(a)是实现本发明实施例提供的磁粒子断层扫描方法的另一种扫描环境的示意图;
46.图5(b)是图5(a)所示的扫描环境中,圆筒结构进行转动所呈现的各种不同角度;
47.图6(a)是基于图5(a)所示扫描环境下获取的扫描数据进行二维成像的流程图;
48.图6(b)是基于图5(a)所示扫描环境下获取的扫描数据进行三维成像的流程图;
49.图7是图2所示的扫描环境中,可带动两组收发线圈进行运动的一种圆形轨道的示意图;
50.图8是利用本发明实施例提供的磁粒子断层扫描方法进行扫描时可采用的一种载置台的示意图;
51.图9是在图2所示扫描环境下,利用本发明实施例提供的磁粒子断层扫描方法实现二维成像的一个效果图;
52.图10是在图2所示扫描环境下,利用本发明实施例提供的磁粒子断层扫描方法实现二维成像的另一个效果图;
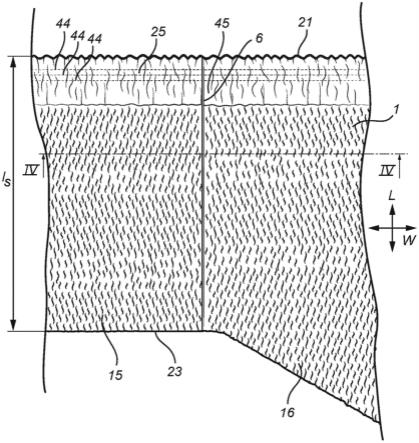
53.图11是在图5(a)所示扫描环境下,利用本发明实施例提供的磁粒子断层扫描方法实现二维成像的一个效果图。
具体实施方式
54.下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。
55.为了使磁粒子成像技术能够对大尺寸成像目标实现扫描成像,本发明实施例提供了一种基于全空间编码的磁粒子断层扫描方法,该方法中包括了信号采集步骤、磁场分布调控步骤以及线圈姿态调控步骤几个关键的步骤。在具体执行该磁粒子断层扫描方法时,执行过程可参见图1所示,包括多次执行线圈姿态调控步骤(图1中执行了m次),并在每次执行线圈姿态调控步骤后多次执行磁场分布调控步骤(图1中执行了n次),以及在每次执行磁
场分布调控步骤后执行一信号采集步骤。由此可得到用于磁粒子成像的全空间编码的扫描数据,该扫描数据主要由各个信号采集步骤中所采集的响应信号的目标特征构成。下面对这几个关键的步骤分别进行说明。
56.信号采集步骤:利用一对激励线圈向成像目标所在的成像区域施加空间非均匀、非线性分布的交变激励场,同时通过一对接收线圈采集成像目标响应于该交变激励场的响应信号,并提取该响应信号的目标特征。
57.其中,该响应信号由成像目标中的所有磁粒子被激发出的信号叠加而成;响应信号的目标特征包括:响应信号的尖峰幅值和/或3倍基频谐波分量。
58.本发明实施例中,基于信号的尖峰幅值和/或3倍基频谐波分量实现磁粒子成像所基于的理论基础是:根据激励磁场强度的大小,单位浓度磁粒子的磁化曲线的形状和大小也有差别,信号尖峰的形状和幅值也不一样。发明人发现,采用交变余弦振荡的激励磁场h(t)=-acos(2πft),磁粒子在其激励下产生的信号尖峰u
peak
与激励磁场的强度a成正比、与磁粒子浓度c成正比,3倍基频谐波分量u3与激励磁场强度a成非线性关系、与磁粒子浓度c成正比。公式(1)和公式(2)示出了该理论基础的简单证明:
[0059][0060][0061]
其中,f表示频率,m表示单个磁粒子的磁矩。μ0表示真空磁导率,kb表示玻尔兹曼常数,t
p
表示成像目标的绝对温度。
[0062]
该信号采集步骤中,能够向成像区域施加交变激励场的激励线圈对存在多种,如圆形霍姆霍兹线圈或者平行激励导线等。使两个激励线圈保持一定的间距,并通过电流激励装置给两个激励线圈施加不同幅度的同向交变交变电流,即可在两个激励线圈之间产生空间非均匀、非线性分布的交变激励场;这样,将成像区域设置在两个激励线圈之间,该成像区域中成像目标的不同位置处的磁粒子感受到的磁场强度便是不同的。其中,电流激励装置可以为数字交流电源或者波形发生器,该电流激励装置可配备相应的软硬件控制模块,以调控电流的幅度、波形以及加载时间等等。
[0063]
接收线圈优选使用圆形霍姆霍兹线圈,当然并不局限于此。通过接收线圈采集响应信号可以借助数据采集器来实现。具体而言,成像目标中的所有磁粒子在交变激励场的激励下共同发出了一个叠加的响应信号,该响应信号能够被接收线圈感应,从而在接收线圈上产生感应电压,利用数据采集器采集该感应电压,便可以采集到响应信号。其中,数据采集器中可以集成有adc(analog-to-digital converter,模数转换模块),从而可以将接收线圈上的感应电压转换为数字信号,以便采用数据处理的方式进行目标特征的提取。
[0064]
在一种可选实现方式中,在对接收线圈上的感应电压进行数据采集之前,还可以先对该感应电压进行低噪音放大和初步的校正处理;然后再进行混频,以滤掉低频和高频噪音,接着再进行模数转换。其中,初步的校正处理包括:根据磁粒子发出的射频信号透过成像目标后到达接收线圈的信号衰减模型来进行修正;该信号衰减模型可预先通过测试或者仿真的手段获得。
[0065]
磁场分布调控步骤:调整激励线圈上施加的交流电流的幅度,以调整交变激励场的空间分布状态。
[0066]
具体的,增大一个激励线圈中的电流幅度一次,并同步减少另一个激励线圈中的电流幅度一次,且在电流幅度调整后维持半个余弦振荡周期。可以理解的是,这里说的余弦振荡周期指的是交流电流的振荡周期,相应的,电流幅度指的是交流电流在振荡周期内的最大值。因此,在信号采集步骤中,从响应信号中提取目标特征,具体可以是对在每个余弦振荡周期内所采集的响应信号进行傅里叶变换和频谱分析,从而从分析结果中提取信号的尖峰幅值和/或三倍基频谐波分量。
[0067]
在一种优选实现方式中,为了使一维空间编码时能够编码均匀,在向两个激励线圈施加幅度变化的交流电流的过程中,可以按照预设的调整步进来逐步增大一个激励线圈中的电流幅度,并同步减少另一个激励线圈中的电流幅度,且同样在每次电流幅度调整后维持半个余弦振荡周期。
[0068]
线圈姿态调控步骤:改变激励线圈相对于成像目标的空间姿态。
[0069]
可以理解的是,两个激励线圈在三维空间中相对于成像目标所呈现的任一种相对位置关系,都可以看做是一种不同的空间姿态。其中,若多次改变的空间姿态都不超出一个二维平面,则最终得到扫描数据可用于二维成像,若多次改变的空间姿态是在三维立体空间中做出的改变,则最终得到扫描数据可用于三维成像。也就是说,利用本发明实施例提供的基于全空间编码的磁粒子断层扫描方法,可实现二维平面或三维立体空间的磁粒子成像。具体的成像过程主要是根据所采集的响应信号目标特征和系统矩阵,利用图像重建的方法进行成像。为了使说明书的布局清晰,后续将会结合不同类型的扫描数据对成像方式进行进一步的说明。
[0070]
本发明实施例提供的基于全空间编码的磁粒子断层扫描方法中,信号采集步骤中给成像区域施加的是空间非均匀、非线性分布的交变激励场,故而成像目标中不同位置处的磁粒子感受到的磁场强度是不同的;又由于在交变激励场激励下,磁粒子响应的信号的尖峰与磁粒子浓度和激励磁场强度成正比,3倍基频谐波分量也与磁场强度成一定的非线性关系、并与磁粒子浓度成正比,故而响应信号的这两种目标特征可以作为磁粒子成像的有效参数。在此基础上,本发明实施例在信号采集步骤中采集的响应信号,是成像目标中的所有磁粒子被激发出的信号叠加而成的,即成像目标所在的全空间中的所有磁粒子都会对采集的响应信号有贡献;其中,通过调控激励磁场的非均匀分布状态再相应地采集响应信号,可实现一维空间编码,通过调控激励线圈相对于成像目标的空间姿态再相应地采集响应信号,可实现二维乃至三维空间编码;由此,整个扫描过程中采集的所有响应信号可以作为磁粒子成像的全空间编码的扫描数据,从而实现磁粒子成像。综上可见,本发明实施例中的扫描方式无需设置磁场自由区,也无需对磁场自由区进行位置变更;这样,成像视野无需如现有技术那样受磁场自由区大小和活动范围的限制,从而可以提高成像视野,使得磁粒子成像技术能够对大尺寸成像目标实现扫描成像,如满足对人体目标进行成像所需的20cm~50cm的扫描视野。并且,不设置磁场自由区便可以省略掉构建磁场自由区所需的线圈以及所相应耗费的功耗,使得成像设备的规模和功耗都会有所降低。此外,与现有技术中几乎以成像图像的分辨率为步进执行扫描的方式相比,本发明实施例中仅需若干次调控整个交变激励场的非均匀分布状态以及若干次调整激励线圈相对于成像目标的空间姿态即可,这
种扫描方式所需耗费的时长远小于现有技术,时效性较高,可有效减轻磁粒子的弛豫效应,使得成像结果更为清晰。
[0071]
在一种优选实现方式中,参见图2所示,上述的磁粒子断层扫描方法中使用的一对激励线圈可以包括:一对圆形的霍姆霍兹发射线圈;使用的一对接收线圈可以包括:一对圆形的霍姆霍兹接收线圈;其中,两个霍姆霍兹发射线圈分别靠近两个霍姆霍兹接收线圈对称放置且四者的轴向方向重合,形成位置相对的两组收发线圈;成像目标位于两组收发线圈的中点,这两组收发线圈能够以成像目标的中心为圆心做不同圆周轨迹的运动,每个圆周轨迹内的运动过程均包括多个停留点位;图2示例性地展示出了两组收发线圈沿一个圆周轨迹进行运动的示意图,其中,两组收发线圈正待从停留点位1向停留点位2运动。
[0072]
可以理解的是,由于两组收发线圈的位置对称性,其产生的磁场也具有对称性,因此两组收发线圈沿圆周轨迹运动半周即可覆盖整个圆周轨迹;例如,两组收发线圈以1
°
为步进沿圆周轨迹运动180
°
即可覆盖整个圆周轨迹。
[0073]
其中,两组收发线圈进行运动时所沿着的各种圆周轨迹可以包括下述圆周轨迹中的一个或多个:
[0074]
所在的平面平行于三维坐标系下的第一平面的第一圆周轨迹、所在的平面与第一平面之间有夹角的第二圆周轨迹、所在的平面与三维坐标系下的第二平面之间有夹角的第三圆周轨迹,以及所在的平面与第一平面、第二平面均有夹角的第四圆周轨迹;其中,第一片面为三维坐标系下的yz平面、xz平面或者xy平面,第二平面为yz平面、xz平面以及xy平面三者中非第一平面的任一平面。
[0075]
举例而言,假设第一平面为三维坐标系下的yz平面,第二平面为三维坐标系下的xz平面,则如图3所示,各种圆周轨迹可以包括:所在的平面平行于三维坐标系下的yz平面的第一圆周轨迹、所在的平面与yz平面之间有夹角的第二圆周轨迹、所在的平面与三维坐标系下的xz平面之间有夹角的第三圆周轨迹,以及所在的平面与yz平面、xz平面均有夹角的第四圆周轨迹。图3中,y轴垂直于图3,各个正圆形的虚线框表示都是空间中存在于三维坐标系下的一个虚拟的球体,该球体的球心为成像目标所在之处,即图3中黑色小圆点。可以理解的是,除第一圆周轨迹外,第二圆周轨迹、第三圆周轨迹以及第四圆周轨迹均包括多个,图3均只是示例性地画出了一个。
[0076]
相应的,上述线圈姿态调控步骤中所说的改变激励线圈相对于成像目标的空间姿态,可以包括:
[0077]
改变两组收发线圈沿当前圆周轨迹做运动时的停留点位,或者当遍历完当前圆周轨迹内的各个停留点位时切换至下一圆周轨迹。
[0078]
可以理解的是,这里说的切换至下一圆周轨迹,具体指的是两组收发线圈运动至下一圆周轨迹的某个停留点位。在此之后的一段时间内,改变激励线圈相对于成像目标的空间姿态,便是改变两组收发线圈沿这一新的圆周轨迹做运动时的停留点位,直至遍历完该圆周轨迹;以此类推,直至扫描结束。
[0079]
在图2所示的扫描环境下,在两个激励线圈之间产生的交变激励场,其轴向分量先线性降低、后线性增加,呈“v”形分布,垂直于线圈轴向方向的每个平面均是一个等磁场面。随着多次执行磁场分布调控步骤,该“v”形磁场将沿着线圈的轴向方向发生位置的偏移,由此实现了一维空间编码。
[0080]
参见图4所示,基于在该“v”形磁场激励下获得的扫描数据,为成像目标进行磁粒子成像的方式包括:
[0081]
s401:针对每个圆周轨迹内的每个停留点位,根据在该停留点位上提取的目标特征以及系统矩阵,重建出对应于该停留点位的、包含成像目标的磁粒子浓度信息的一维投影分布数据。
[0082]
其中,系统矩阵用于表征单位浓度的磁粒子在交变激励场作用下的响应信号的目标特征的空间分布;基于该系统矩阵可以反推出每个停留点位上各时刻的磁粒子浓度,从而利用图像重建的方法实现成像。
[0083]
需要说明的是,现有mpi(magnetic particle imaging,磁粒子成像)系统的系统矩阵中,每一列元素包括了已知浓度的磁粒子样品在成像区域中的某个位置上所产生信号的一组傅里叶分量。即一列元素几乎囊括了该位置上所产生的信号的各次谐波。而本发明实施例中,系统矩阵的每个元素都是单位浓度的磁粒子在某一位置上所产生信号的尖峰幅值或3倍基频谐波分量,与现有mpi系统的系统矩阵不同。
[0084]
具体重建过程可用下式进行表示:
[0085]
c=g-1
u;(3)
[0086][0087]
其中,i0,i1,
…
,i
n 1
表示两个激励线圈上加载的n次不同幅度的电流,r0,r1,
…
,r
n 1
表示将成像目标所在的成像区域划分的n个位置点;u表示一个停留点位上的目标特征,其中的元素u(i1)表示在给激励线圈施加电流i1的半个余弦振荡周期中,所采集到的响应信号的目标特征,其余元素的含义以此类推。g为系统矩阵,其中左下角的元素g(i
n-1
,r0)表示单位浓度的磁粒子在电流i
n-1
激励的磁场作用下,所产生响应信号的目标特征分布在成像区域的第r0个位置点的分量;其余元素的含义以此类推。c表示重建出的一维投影分布数据,其所包含的各个元素是成像区域中各位置点上的磁粒子浓度。
[0088]
在实际应用中,若系统矩阵不是很庞大,则可以直接按照上述公式(3)中所示的,先对系统矩阵进行求逆,再对求逆的系统矩阵g-1
以及矢量u做乘法的方式来实现数据重建。若系统矩阵较为庞大,直接求逆较为困难,则可以将c中的元素作为待求解的变量x,通过构建一组方程u(in)=g(in,r0)x g(in,r1)x
…
g(in,r1)x,n∈[0,n-1],并对该组方程运用迭代方式进行求解,从而根据求解结果来实现数据重建。其中,迭代方法如常用的代数重建法、联合代数重建法、最大似然期望最大化算法或有序子集期望最大化算法等等。
[0089]
s402:针对每个圆周轨迹,根据该圆周轨迹内各个停留点位的一维投影分布数据,
利用滤波反投影重建的方法,重建出成像目标沿对应的成像方向投影的二维磁粒子浓度分布图像。
[0090]
这里,二维磁粒子浓度分布图像即是为成像目标沿成像方向所投影的二维成像结果。该成像方向与圆周轨迹对应,每个圆周轨迹对应的成像方向垂直于该圆周轨迹所在的平面。可以理解的是,如果仅需沿一个成像方向进行二维成像,则只需扫描对应的一个圆周轨迹;如果需要沿多个成像方向分别进行二维成像,则对应扫描多个圆周轨迹即可。
[0091]
该步骤s402中,滤波反投影重建的方法常用在ct(computed tomography,电子计算机断层扫描)成像重建中,其背后的数学原理是拉东变换。本发明实施例运用滤波反投影重建的方法来重建磁粒子浓度分布图像的方式基本与此相同,故不再进行赘述。
[0092]
在二维成像的基础上,本发明实施例还可以进一步为成像目标实现三维成像,此时可按照图2所示的四种圆周轨迹执行多次扫描。相应的,参见图4(b)所示,三维成像过程可以在步骤s402之后,进一步增加步骤s403。
[0093]
s403:根据成像目标沿各成像方向的二维磁粒子浓度分布图像,利用层析合成的方法,重建出成像目标在三维空间的磁粒子浓度分布图像。
[0094]
其中,基于层析合成的重建过程是基于这些沿不同方向投影的二维磁粒子浓度分布图像中的数据信息,通过反演计算得到成像目标在三维空间的磁粒子浓度分布图像,具体的成像过程相似于ct成像,本发明实施例不做赘述。
[0095]
在另一种实现方式中,参见图5(a)所示,本发明实施例中执行扫描时所使用的一对激励线圈可以是多对平行激励导线中的一对;这些平行激励导线依附于一圆筒结构分散排布,每对平行激励导线所在的平面均穿过该圆筒结构的中线;该圆筒结构能够围绕成像目标的中心进行不同角度的转动,从而带动这些平行激励导线以成像目标的中心为圆心、按不同圆周轨迹进行分布;另外,执行扫描时所使用的一对接收线圈可以包括:一对圆形霍姆霍兹线圈,分别位于该圆筒结构的两个底面。
[0096]
其中,圆筒结构以成像目标的中心为球心进行各种角度的转动后所呈现的姿态可参见图5(b)所示,包括向左或向右倾斜一定的角度,向左或向右侧偏一定的角度,以及在一定倾角的基础上再进行侧偏等,图5(b)中并未完全示出所有的姿态。由此,在圆筒结构的带动下,这些平行激励导线按照圆周轨迹进行分布时所能够沿着的圆周轨迹可参见图3所示,此时每根激励导线均是垂直于圆周轨迹的。
[0097]
相应的,线圈姿态调控步骤中所说的改变激励线圈相对于成像目标的空间姿态,包括:
[0098]
切换这些平行激励导线按当前圆周轨迹进行分布时所打开的一对平行激励导线,或者在遍历完当前圆周轨迹下的各对平行激励导线时切换至下一圆周轨迹。
[0099]
可以理解的是,这里说的切换至下一圆周轨迹,具体指的是圆筒结构转动至其筒体的截面与下一圆周轨迹重合,并相应打开某一对平行激励导线。在此之后的一段时间内,改变激励线圈相对于成像目标的空间姿态,便是切换圆筒结构在维持当前姿态的情况下所打开的一对平行激励导线,直至遍历完所有对平行激励导线;以此类推,直至扫描结束。
[0100]
在图5(a)所示的扫描环境下,每对平行激励导线之间产生的交变激励场沿着两者的垂直连线的方向先线性降低、后线性增加,呈“v”形分布。
[0101]
相应的,使用图5(5)所示的扫描环境执行扫描获得的扫描数据后,基于该扫描数
据为成像目标进行磁粒子成像的方式参见图6(a)所示,包括:
[0102]
s601:针对每个圆周轨迹内打开的一对平行激励导线,根据打开该对平行激励导线时所提取的目标特征以及系统矩阵,重建出对应于该对平行激励导线的、包含成像目标的磁粒子浓度信息的一维投影分布数据。
[0103]
其中,系统矩阵用于表征单位浓度的磁粒子在产生的交变激励场作用下的响应信号的目标特征的空间分布。具体的重建过程与图2所示扫描环境下的重建过程相同,此处不再进行赘述。
[0104]
s602:针对每个圆周轨迹,根据该圆周轨迹内对应于各对平行激励导线的一维投影分布数据,利用滤波反投影重建的方法,重建出成像目标沿对应的成像方向投影的二维磁粒子浓度分布图像。
[0105]
这里,二维磁粒子浓度分布图像即是为成像目标沿成像方向所投影的二维成像结果。该成像方向与圆周轨迹对应,每个圆周轨迹对应的成像方向垂直于该圆周轨迹所在的平面。与图2所示扫描环境下的重建过程相同的是,如果仅需沿一个成像方向进行二维成像,则只需扫描对应的一个圆周轨迹;如果需要沿多个成像方向分别进行二维成像,则对应扫描多个圆周轨迹即可。
[0106]
在二维成像的基础上,利用图5(a)所示的扫描环境同样可以实现三维成像。具体只需在步骤s602后增加步骤s603,如图6(b)所示。
[0107]
s603:根据成像目标沿各成像方向的二维磁粒子浓度分布图像,利用层析合成的方法,重建出成像目标在三维空间的磁粒子浓度分布图像。
[0108]
该步骤s603的具体实现方式与步骤s403相似,不再进行赘述。
[0109]
在一种可选实现方式中,本发明实施例提供的基于全空间编码的磁粒子断层扫描方法还可以包括:当执行信号采集步骤时,利用屏蔽线圈产生屏蔽磁场,以饱和约束成像区域以外的区域中存在的磁粒子。
[0110]
具体而言,可以成像目标的下方设置一载置台,并在该载置台的内部并行排列设置多个矩形的屏蔽线圈。示例性的,当进行人体扫描成像时,上述载置台可以是一个检查床。当施加交变激励场时,将与成像目标的位置上下对应的屏蔽线圈关闭,并给其余的屏蔽线圈加载直流电流。这样,在成像目标周围的非成像区域便可以产生屏蔽磁场,从而减少外部干扰对扫描数据的准确性的影响。例如,当磁粒子设备位于屏蔽效果不良的环境中时,开启屏蔽线圈可以有效饱和约束非成像区域以外的区域中存在的磁粒子,使得仅位于成像区域内的磁粒子被激励线圈激励。
[0111]
优选地,在一种实现方式中,本发明实施例提供的基于全空间编码的磁粒子断层扫描方法还可以包括:在每次执行信号采集步骤的过程中,在提取目标特征之前,对所采集的响应信号进行反卷积处理,以减轻因磁粒子弛豫效应导致的信号形变。这里因磁粒子弛豫效应导致的信号形变主要包括信号幅度的降低,以及时域的展宽和延迟、不对称等。通过反卷积操作,可以对采集的信号进行校正,减轻信号形变,使最终提取的目标特征能够更佳准确。
[0112]
在实际应用中,大尺寸(30nm~100nm)的磁粒子更容易产生驰豫效应,因此,如果成像目标中的磁粒子尺寸较大,则可以通过执行该反卷积处理的步骤来减轻信号形变。
[0113]
另外,为了进一步减轻信号形变,从而提取到精确的目标特征,本发明实施例提供
的基于全空间编码的磁粒子断层扫描方法还可以包括:
[0114]
在每次执行信号采集步骤的过程中,提取并记录所采集的响应信号的信号面积;根据所记录的信号面积对扫描数据中的目标特征进行校正。
[0115]
其中,信号面积指的是信号的时域曲线下的面积,可以通过对时域下采集的数据进行积分获得。
[0116]
发明人在实现本发明的过程中发现,信号面积与磁场强度无关,与磁粒子浓度成正比。因此,无论如何调整磁场空间分布或者调整激励线圈相对于成像目标的空间姿态,假设成像目标的磁粒子浓度分布情况保持不变,则每次采集的响应信号的面积其实是一个守恒量。考虑到实际的成像目标的磁粒子浓度分布在短时间内不变、在长时间内可能有所变化的情况,本发明实施例优选采用以停留点位/平行激励导线对为单位、根据信号面积来进行目标特征校正的方案,以使最终提取的目标特征能够更佳准确。
[0117]
具体而言,提取信号面积具体可以是对时域上采集的数据进行积分处理。在每个停留点位或开启每对平行激励导线时上,每变换一次电流幅度都会采集一次响应信号,并提取该响应信号的信号面积;当电流幅度调整的过程结束,即完成该停留点位/平行激励导线对上的扫描后,比较所采集的所有响应信号的信号面积,对其中信号面积异常的响应信号进行修正,具体修正的方式存在多种。例如,可以给激励线圈重新施加对应的电流,从而重新进行采集;或者利用采集时间相邻的响应信号对该异常的响应信号进行修正等等,这都是合理且可实现的。
[0118]
在一种可选实现方式中,本发明实施例提供的基于全空间编码的磁粒子断层扫描方法,还可以包括:
[0119]
在每次执行信号采集步骤的过程中,提取并记录所采集的响应信号的半值全宽;根据所记录的半值全宽确定扫描过程中的所述交变激励场是否存在异常。
[0120]
其中,半值全宽指的是信号的幅度下降到一半时对应的时域的宽度。利用该半值全宽,可以用来帮助检验驰豫效应反卷积的执行效果,还可以进行激励磁场监控。
[0121]
发明人在实现本发明的过程中发现,响应信号的半值全宽与磁粒子浓度无关,但是与激励磁场强度成反比关系;因此,通过统一比较实际采集的响应信号的半值全宽,可以用来检验激励磁场的稳定性,发现无形的磁场中所可能出现的异常,以确保最终的成像结果所依赖的数据真实有效。通常来说,激励磁场异常的出现可能与外部干扰有关;发现激励磁场异常后,可采取更高级别的屏蔽措施,例如打开成像区域外的屏蔽线圈等,重新进行系统矩阵的测定,然后再重新进行扫描成像。考虑到统一对整个扫描过程中采集的信号的半值全宽进行对比效率较低,因此本发明实施例采用了以停留点位/平行激励导线对为单位进行半值全宽比较的方案。
[0122]
具体而言,在每个停留点位上或打开每一对平行激励导线时,每变换一次电流幅度都会采集一次信号,并提取该信号的半值全宽;当电流幅度调整的过程结束,比较所采集的所有响应信号的半值全宽,从而从中发现异常的半值全宽。另外,输出激励磁场异常提示的方式可以包括显示输出、声音输出等。
[0123]
在一个实施例中,本发明实施例提供的基于全空间编码的磁粒子断层扫描方法可以同时利用尖峰幅值和3倍基频谐波分量分别进行成像,并对得到两个成像结果进行融合。具体而言,每次在从响应信号中提取目标特征时,提取尖峰幅值和3倍基频谐波分量。然后
分别利用尖峰幅值和3倍基频谐波分量进行成像,得到两个成像结果。然后,对这两个成像结果进行融合,即对两个成像的图像进行图像融合,从而进一步提高重建的效果。具体的图像融合方式可以包括图像间相同位置的像素的加权融合或其他常用的图像融合方式等等。
[0124]
在一个优选的示例中,参见图2所示的扫描环境,两个激励线圈的直径均为40cm,厚度和宽度均为5cm,线圈匝数为200匝,被施加的电流幅度为20a~40a。两个激励线圈的间距为40cm,即圆周轨迹的直径为40cm,给两个激励线圈施加同向交变电流,在两组收发线圈的中心成像区域可以产生15mt~30mt的余弦交变激励场,交流频率为25khz~35khz;磁场强度大于10mt可确保信号出现幅值尖峰,同时在医学用途中也可以过滤人体内部的铁。在施加电流激励的过程中,一个激励线圈的电流由20a开始逐步增加,每次增加0.78a,共增加256次,直至增加到40a;同时,另一个激励线圈的电流从40a开始同步降低,每次降低0.78a,共降低256次,直至降低到20a;由此使得“v”形磁场的形状和位置发生256次独立的变化,即实现了256位的一维空间编码。每次调整电流幅度后,保持0.017ms,进行半个余弦振荡周期内的激励和相应的信号采集。由此,每个停留点位的扫描共需要4.267ms。相应的,后续进行一维数据重建后,得到的是沿着激励线圈轴向方向的256层面的磁粒子浓度分布信息。两个接收线圈的直径均为40cm,厚度和宽度均为5cm。两者间距为50cm,分别紧靠在两个激励线圈的内侧,形成位置相对的两组收发线圈。
[0125]
借助一圆形轨道带动两组收发线圈围绕成像目标的中心沿多个圆周轨迹运动。该圆形轨道的半径为40cm,两组收发线圈分别固定在该圆形轨道上,并以轨道圆心为中点对称布设(如图7所示)。圆形轨道绕圆心转动,带动两组收发线圈围绕成像目标的中心做180度旋转,每隔1度停留4.267ms,停留的时长内打开激励线圈和接收线圈,完成这个角度的256次信号的采集,然后转到下1度,以此类推。由于“v”形磁场的对称性,只需采集0
°
到180
°
的信号,181
°
与1
°
重复,无需重复采集。0
°
到180
°
的信号采集共进行180次,共花费时间为0.768秒。每个圆周轨迹下完成扫描后,可以切换下一个圆周轨迹继续扫描。
[0126]
具体而言,假设圆形轨道的初始位置位于三维坐标系下的yz平面内;并且,圆形轨道可以分别向左右方向各倾斜1
°
~7
°
,共15个倾角(倾斜方式参见图3中的第二圆周轨迹);其中,在每个倾角下,圆形轨道还可以分别向前后两个方向各侧偏1
°
~7
°
,共15个侧角(倾角为0
°
时的侧偏方式参见图3中的第三圆周轨迹,倾角不为0
°
时的侧偏方式参见图3中的第四圆周轨迹)。由此,圆形轨道位于初始位置上时,沿第一圆周轨迹进行运动,耗费的扫描时间为0.768秒;然后,设定倾角为1
°
,对15个侧角进行遍历,耗费扫描时间0.768*15=11.52秒;设定倾角为2
°
,对15个侧角进行遍历,耗费扫描时间0.768*15=11.52秒;以此类推,直至将-7
°
~7
°
的倾角以及-7
°
~7
°
的侧角全部遍历完成,共耗费扫描时间2.88分钟。其中,对响应信号进行数据采集时的采样频率15mhz,半个余弦振荡周期内采样点数250个。由于一共在256*180*15*15个半振荡周期内都要进行数据采集,故总共采集的信号点数为14.4m个。此外,为了增强屏蔽效果,还可以在扫描过程中使用屏蔽线圈;具体而言,将成像目标放置在一个载置台上,该载置台内部放置有15个宽度为10cm,长度为30cm的矩形线圈(如图8所示),线圈匝数为200匝,加载的直流电流为30a。扫描时,中心用于成像的区域里的2~5个线圈关闭,其余位置的线圈打开,产生30mt的屏蔽磁场,用来饱和约束外围区域的磁粒子,避免产生干扰信号。
[0127]
基于这一扫描环境进行二维成像,成像效果参见图(9)和图(10)所示。
[0128]
图(9)和图(10)中,成像目标是磁粒子呈二维平面分布的样品,其磁粒子分布如图中所示的原始图像,白色区域为有磁粒子分布的区域,黑色区域是无磁粒子分布的区域;可以看到重建的二维图像可以清楚地显示出成像目标原有的磁粒子分布情况。
[0129]
在另一个优选的示例中,参见图5所示的扫描环境,圆筒结构的直径为40cm,长度为60cm,由此每对平行激励导线的间距为40cm,长度为60cm,将360根平行导线围绕圆筒结构分散排布,每次选择能够将圆筒结构从圆形底面一分为二的两根平行导线作为一对平行激励导线。每对平行激励导线的长度均为40cm,线径均为2cm。向任一对平行激励导线施加同向交变电流,均可在圆筒结构的中心区域产生15mt~30mt的余弦交变激励场,频率为25khz~35khz。在施加电流激励的过程中,一根激励导线上的电流由20a开始逐步增加,每次增加0.78a,共增加256次,直至增加到40a;同时,另一根激励导线的电流从40a开始同步降低,每次降低0.78a,共降低256次,直至降低到20a;由此使得“v”形磁场的形状和位置发生256次独立的变化,即实现了256位的一维空间编码。每次调整电流幅度后,保持0.017ms,进行半个余弦振荡周期内的激励和相应的信号采集。由此,每打开一对平行激励导线进行扫描共需要4.267ms。相应的,后续进行一维数据重建后,得到的是沿着激励导线对的垂直连线方向的256层面的磁粒子浓度分布信息。两个接收线圈的直径均为60cm,厚度和宽度均为5cm,分别紧靠在圆筒结构的两个圆形的底面。圆筒结构可围绕中心成像区域以各种不同的角度进行转动,每停在一个角度停留4.267ms,打开一对平行激励导线和接收线圈,完成这个角度的256次信号采集,然后选择下一对平行激励导线,仍停留4.267ms,以此类推。完成采集后,调整圆筒结构的角度,继续进行其他角度下的信号采集。
[0130]
具体而言,参见图5(b)所示,圆筒结构可分别向左右方向各倾斜1
°
~7
°
,共15个倾角;其中,在每个倾角下,圆筒结构还可以分别向左或向右侧偏1
°
~7
°
,共15个侧角。由此,假设圆筒结构的初始姿态如图5(b)中的中间区域所示,此时各对平行激励导线按第一圆周轨迹进行分布,遍历各对平行激励导线耗费的扫描时间为0.768秒;然后,设定倾角为1
°
,对15个侧角进行遍历,耗费扫描时间0.768*15=11.52秒;设定倾角为2
°
,对15个侧角进行遍历,耗费扫描时间0.768*15=11.52秒;以此类推,直至将-7
°
~7
°
的倾角以及-7
°
~7
°
的侧角全部遍历完成,共耗费扫描时间2.88分钟。其中,对响应信号进行数据采集时的采样频率15mhz,半个余弦振荡周期内采样点数250个。由于一共在256*180*15*15个半振荡周期内都要进行数据采集,故总共采集的信号点数为14.4m个。此外,为了增强屏蔽效果,同样可使用屏蔽线圈,此处不再进行赘述。
[0131]
基于这一扫描环境进行二维成像,成像效果参见图(11)所示。图(11)中,成像目标是一病患的头部,原始图像是利用磁共振设备拍摄的该病患的头部磁共振血管图像的最大强度投影图;可以看到,磁共振成像中包含有颅脑内部其他组织的影像,和血管组织的影像叠加在了一起;而利用本发明实施例提供的磁粒子断层扫描方法扫描的数据所重建的二维图像中,仅显示出了存在有磁粒子分布的血管组织。
[0132]
本发明实施例没有使用现有磁粒子成像技术中的选择场和聚焦场,整个成像空间的每个点都是磁场自由区,能够被余弦交变激励场激励。通过对全空间进行空间编码,利用系统矩阵和图像重建的方法重建出成像目标的磁粒子浓度分布图像,实现了低功耗、大视野、高分辨率的磁粒子成像。
[0133]
本发明实施例提供的基于全空间编码的磁粒子断层扫描方法可应用于医学成像、
工业上缺陷检测等领域。其中,本发明实施例提供的磁粒子断层扫描方法在医学上的用途包括但不限于心脑血管成像、肿瘤影像成像,以及干细胞追踪、红细胞标记、免疫细胞标记、炎症细胞监测等靶向成像。其中,相对于现有血管成像技术,本发明实施例进行磁粒子成像不需要做数字减影,具有较少的运动伪影。与现有的pet(positron emission computed tomography,正电子发射型计算机断层显像)和spect(single photon emission computed tomography,单光子发射计算机断层成像术)的成像技术相比,本发明实施例具有更高的灵敏性和图像分辨率,能够满足临床应用的需求;且本发明实施例没有电离辐射,示踪剂的生产和存储也较为容易。
[0134]
本发明实施例提供的基于全空间编码的磁粒子断层扫描方法可以应用于磁粒子成像设备/系统。对于磁粒子成像设备/系统而言,其内部结构除包含用于实现本发明实施例提供的方法的软硬件模块之外,还可以包含其他模块,如通信接口、显示模块、打印模块以及辅助模块等等,本发明实施例对此不做限定。
[0135]
需要说明的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0136]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
[0137]
尽管在此结合各实施例对本技术进行了描述,然而,在实施所要求保护的本技术过程中,本领域技术人员通过查看所述附图、公开内容、以及所附权利要求书,可理解并实现所述公开实施例的其他变化。
[0138]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。