1.本公开涉及用于在重新定位端部执行器时给外科机器人臂和端部执行器的操作者一致的轻松感的数字控制技术。
背景技术:
2.微创外科手术(mis)诸如腹腔镜手术涉及旨在在外科规程期间减少组织损伤的技术。例如,腹腔镜规程通常涉及在患者体内(例如,在腹部)形成多个小切口,以及通过切口将一个或多个工具和至少一个内窥镜相机引入患者体内。然后通过使用引入的工具执行外科规程,其中可视化辅助由相机提供。一般来讲,mis提供多重有益效果,诸如减少患者疤痕、减轻患者疼痛、缩短患者恢复期以及降低与患者恢复相关联的医疗费用。
3.mis可以用包括若干机器人臂的外科机器人系统来执行。每个臂具有外科工具或器械,外科工具或器械在其端部处是端部执行器,诸如夹钳、剪刀和内窥镜摄像头,它们在手术部位插入患者体内。使用由操作者(例如,外科医生)“远程”操纵的臂和端部执行器对患者的身体组织进行外科手术。外科机器人系统确保端部执行器的位置和取向将模拟外科医生手中的用户输入装置(uid)的操纵。这由数字控制系统实现,该数字控制系统跟踪uid的运动,并且作为响应来计算对臂的机动关节的适当命令,从而导致端部执行器的运动模拟手持式uid的运动。
技术实现要素:
4.当操作者在外科机器人臂的端部处(经由他们手中的uid远程地)操纵端部执行器时,他们可能不知道端部执行器可以沿哪个方向更容易移动。他们可能期望端部执行器的控制应该是各向同性的,即能够沿所有方向并且对于臂的所有可能配置(例如,关节角度)以相同的速度移动。然而,实际上,外科机器人臂不是各向同性的。对于臂的任何给定配置(包括臂当前所处的一组给定关节角度),端部执行器沿所有方向移动的难易程度不同。考虑人的实际臂—人的手从左到右摆动的速度比前后摇摆的速度要快。即使人对自己的身体有这样的了解,但他们通常不会对外科机器人臂的行为也有同样的了解。
5.在此公开的各个方面是数字控制方法,旨在为操纵外科机器人臂上的端部执行器的操作者产生一种各向同性或一致的轻松感。这可以使系统对操作者而言感觉更为自然。
6.在一个方面,一种用于调节外科机器人臂的关节空间速度的方法具有以下操作,由编程的处理器执行。对于外科机器人臂的给定配置,接收任务空间速度(例如,线性或平移速度,基于uid跟踪序列)。对于臂的活动关节中的每一个活动关节,潜在的关节速度由以下方式计算i)产生向量,该向量具有所接收的任务空间速度的范数并且具有沿端部执行器的速度椭球的最长主轴的取向,以及ii)将臂的逆运动学方程应用于该向量以产生潜在的关节速度。当所计算的潜在的关节速度超过相应关节的关节速度极限时,计算i)关节速度极限和ii)潜在的关节速度之间的比率。关节空间速度极限可以由主动(机动)和被动关节的机械特性定义,并且可以大于或小于所计算的潜在的最大关节空间速度。然后将该比率
应用于(例如,乘以)初始关节空间速度,该初始关节空间速度可以是所接收的任务空间速度到关节空间的转换,以(对于给定外科机器人臂配置)产生经过调节的关节空间速度。
7.经过调节的关节空间速度可以为正在操纵uid的操作者提供更一致的轻松感。控制端部执行器运动的这种方式可以给操作者沿所有方向一致的轻松感。
8.上述发明内容不包括本公开的所有方面的详尽列表。可以设想的是,本公开包括所有系统和方法,该系统和方法可由上文概述的各个方面的所有合适组合以及下文具体实施方式中公开并且在权利要求部分中特别指出的那些来实施。此类组合可具有未在上述发明内容中具体叙述的特定优点。
附图说明
9.本公开的若干方面在此以举例方式而非限制性方式在附图的各图中示出,其中类似的附图标号指示类似的元件。应当指出,在本公开中提到“一”或“一个”方面不一定是同一个方面,并且它们是指至少一个。另外,为了简洁和减少附图的总数,可使用给定附图来示出本公开的多于一个方面的特征,并且对于给定方面可能并非需要附图中的所有元件。
10.图1是具有外科机器人系统的手术室布置的概览示意图。
11.图2示出了端部执行器线速度的区域或方向如何受到所需的最大端部执行器速度的影响,并且对于不同的外科机器人臂配置具有不同的最大关节速度。
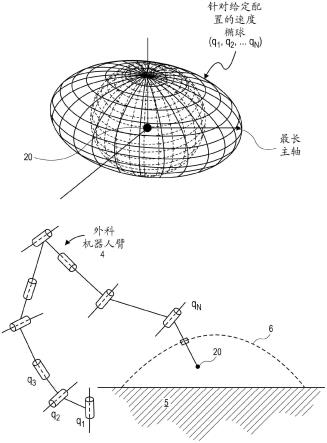
12.图3描绘了作用中的示例性外科机器人臂,以及针对臂的给定配置的速度椭球。
13.图4是用于调节外科机器人臂的关节空间速度的过程的流程图。
具体实施方式
14.现在参考附图来解释本公开的若干方面。每当未明确限定所述零件的形状、相对位置和其他方面时,本发明的范围并不仅限于所示出的零件,所示出的零件只是出于说明目的。另外,虽然阐述了许多细节,但应当理解,可在没有这些细节的情况下实践本公开的一些方面。在其他情况下,未详细示出熟知的电路、结构和技术,以免模糊对本说明书的理解。
15.参见图1,这是手术场所中的示例性外科机器人系统1的绘画视图。机器人系统1包括用户控制台2、控制塔3和可安装到外科机器人平台5(例如,台、床等)的一个或多个外科机器人臂4。图1示出了臂4安装到搁置患者的台或床上的示例。系统1可以结合用于对患者6执行手术的任何数量的装置、工具或附件。例如,系统1可包括用于执行外科手术的一个或多个外科工具7。外科工具7可以是附接到外科臂4的远侧端部的端部执行器,用于执行外科规程。
16.每个外科工具7可在外科手术期间手动操纵、机器人操纵或两者。例如,外科工具7可以是用于进入、查看或操纵患者6的内部解剖结构的工具。在一个实施方案中,外科工具7为可抓持患者的组织的抓持器。外科工具7可由床边操作者8手动控制;或者其可经由其所附接的外科机器人臂4的致动移动而由机器人控制。机器人臂4被示出为台上安装系统,但在其他实例中,臂4可安装在手推车、天花板或侧壁上,或者安装在另一个合适的结构支撑件中。
17.一般来讲,远程操作者9(诸如外科医生或其他操作者)可使用用户控制台2以远程
操纵臂4和/或所附接的外科工具7,例如远程操作。用户控制台2可位于与系统1的其余部分相同的手术室中,如图1所示。然而,在其他环境中,用户控制台2可位于相邻或附近的房间中,或者其可位于远程位置,例如,在不同的建筑物、城市或国家中。用户控制台2可包括座椅10、脚动控件13、一个或多个手持式用户输入装置(uid)14以及至少一个用户显示器15,该用户显示器被配置为显示例如患者6体内的外科手术部位的视图。在示例性用户控制台2中,远程操作者9坐在座椅10中并且查看用户显示器15,同时操纵脚动控件13和手持式uid14,以便远程控制臂4和外科工具7(外科工具安装在臂4的远侧端部上)。
18.在一些变型中,床边操作者8还可以“床上”模式操作系统1,其中床边操作者8(用户)现在位于患者6的一侧并且同时操纵机器人驱动的工具(附接到臂4的端部执行器),例如,用一只手握持手持式uid14和手动腹腔镜工具。例如,床边操作者的左手可操纵手持式uid以控制机器人部件,而床边操作者的右手可操纵手动腹腔镜工具。因此,在这些变型中,床边操作者8可对患者6执行机器人辅助微创外科手术和手动腹腔镜外科手术两者。
19.在示例性规程(外科手术)期间,以无菌方式对患者6进行准备并且覆盖消毒盖布以实现麻醉。在机器人系统1的臂处于收起条件或撤回条件时,可手动地执行对手术部位的初始触及(以便于触及手术部位)。一旦完成触及,就可执行机器人系统1包括其臂4的初始定位或准备。接着,外科手术继续,其中用户控制台2处的远程操作者9利用脚动控制件13和uid14来操纵各种端部执行器以及可能的成像系统,以执行外科手术。也可由身着消毒手术衣的床边人员(例如,床边操作者8)在手术床或手术台处提供人工辅助,该床边人员可对机器人臂4中的一个或多个臂执行任务,诸如回缩组织、执行手动重新定位以及工具更换。也可存在非消毒人员以在用户控制台2处辅助远程操作者9。当规程或外科手术完成时,系统1和用户控制台2可被配置或设定成一定状态以便于完成术后规程,诸如清洁或消毒以及经由用户控制台2输入或打印保健记录。
20.在一个实施方案中,远程操作者9保持并且移动uid14以提供输入命令,从而移动机器人系统1中的机器人臂致动器17。uid14可例如经由控制台计算机系统16通信地联接到机器人系统1的其余部分。uid14可生成对应于uid14的移动的空间状态信号,例如uid的手持式外壳的方位和取向,并且空间状态信号可以是控制机器人臂致动器17的运动的输入信号。机器人系统1可使用源自空间状态信号的控制信号来控制致动器17的成比例运动。在一个实施方案中,控制台计算机系统16的控制台处理器接收空间状态信号并生成对应的控制信号。基于控制致动器17如何通电以移动臂4的区段或连接件的这些控制信号,附接到臂的对应外科工具的移动可模拟uid14的移动。类似地,远程操作者9与uid14之间的交互可生成例如抓持控制信号,该抓持控制信号导致外科工具7的抓持器的钳口闭合并且抓持患者6的组织。
21.外科机器人系统1可包括若干uid14,其中为控制相应臂4的致动器和外科工具(端部执行器)的每个uid生成相应的控制信号。例如,远程操作者9可移动第一uid14以控制位于左机器人臂中的致动器17的运动,其中致动器通过移动臂4中的连杆、齿轮等来响应。类似地,远程操作者9对第二uid14的移动控制另一个致动器17的运动,这继而移动机器人系统1的其他连杆、齿轮等。机器人系统1可包括固定到患者的右侧的床或台的右臂4,以及位于患者的左侧的左臂4。致动器17可包括一个或多个马达,控制该一个或多个马达,使得它们驱动臂4的接合部旋转,以例如相对于患者改变附接到该臂的外科工具7的内窥镜或抓持
器的取向。同一臂4中的若干致动器17的运动可由从特定uid14生成的空间状态信号控制。uid14还可控制相应外科工具抓持器的运动。例如,每个uid14可生成相应的抓持信号以控制致动器(例如,线性致动器)的运动,该致动器在外科工具7的远侧端部处打开或闭合抓紧器的钳口以抓持患者6体内的组织。
22.在一些方面,平台5和用户控制台2之间的通信可通过控制塔3,该控制塔可将从用户控制台2(并且更具体地从控制台计算机系统16)接收的用户命令转换成传输到机器人平台5上的臂4的机器人控制命令。控制塔3还可将状态和反馈从平台5传输回用户控制台2。机器人平台5、用户控制台2和控制塔3之间的通信连接可经由有线和/或无线链路,使用各种数据通信协议中的任何合适的数据通信协议。任何有线连接可任选地内置于手术室的地板和/或墙壁或天花板中。机器人系统1可向一个或多个显示器提供视频输出,包括手术室内的显示器以及可经由互联网或其他网络访问的远程显示器。还可加密视频输出或馈送以确保隐私,并且视频输出的全部或部分可保存到服务器或电子保健记录系统。
23.外科机器人臂4是运动学冗余的操纵器,因为它具有至少为7的多个关节,这些关节可以被分配关节位置变量q1、q2、
…
qn。关节将其相邻的刚性连接件连接成序列,例如如图3所示,在远侧末端或端部执行器20处结束。臂4进行关节运动,使得端部执行器20位于患者6的体腔内。端部执行器20是附接在关节qn处的外科工具7的一部分,参见图1。一些关节可能在机械约束下是被动的,而其他关节是主动的或机动的。一些关节可以是旋转的,而另一些可以是棱柱形的。关节位置变量表示关节的相邻连接件之间的相对位移(例如,角度、线性)。
24.可以定义被称为任务空间的坐标系,端部执行器20或尖端在该坐标系中移动;这种移动由关节位置变量q1、q2、
…
qn作为一个整体来控制,它们可以在被称为“关节空间”的坐标系中形成关节向量。一组正向运动学方程定义了函数,该函数根据关节空间(臂4的关节位置)确定端部执行器20的“任务空间”笛卡尔位置和取向。一组逆运动学方程定义逆函数,根据端部执行器20的任务空间位置和取向来确定关节位置变量q1、q2、
…
qn的值。
25.与对操纵端部执行器20的难易程度的考虑更相关的是外科机器人臂4的速度运动学。这限定了端部执行器20的线速度(任务空间线速度)和关节速度变量dq1/dt、dq2/dt、
…
dqn/dt之间的关系(如果臂包含棱柱关节,则关节角速度和关节线速度)。就这一点而言,图2用于描绘若干概念。首先,示出了(当臂4由控制系统驱动时)端部执行器20可达到的最大速度如何在所有方向上不一致。这是由于外科机器人臂4的多连接件、多关节性质以及端部执行器4不受限制沿任何方向移动的事实(但当然由于机动关节的功率有限,因此其速度有限)。端部执行器20可以给定的最大任务空间速度被驱动的方向有限—存在端部执行器20无法以该速度被驱动的方向,如所示的九个示例所示。图2还示出了对应于三个不同的最大任务空间速度的三列。在每一列中,可见能够满足给定最大任务空间速度的工作空间如何根据可用最大关节速度而增加。如果可用的最大关节速度增加,那么就存在更多的方向可以满足期望的最大任务空间速度。
26.考虑图2中的三行,每一行示出了如何(即通过降低最大任务空间速度)扩展可以满足最大任务空间速度的工作空间。因此,为了产生端部执行器20沿大多数(如果不是所有)方向都容易移动的接近各向同性的系统,图2表明了最大任务空间速度需要充分降低,而最大关节空间速度需要足够高。需要将这两个方面联系起来,即最大关节速度(主要由活
动关节中的马达功率和传动比决定)和最大任务空间速度(可能来自临床需要),以便解决如何确保在外科机器人臂4上移动端部执行器20时的各向同性轻松感的问题。还可能需要调节任务空间速度,使得可以满足给定的关节速度要求,并且获得各向同性轻松感。现在结合图3与图4的流程图来呈现解决此类问题的系统方法,其中关节空间速度在某些情况下受到限制或被调节,从而使操作者能够感觉到各向同性运动(当经由手持式uid14远程地操纵端部执行器20时)。
27.图3示出了示例性外科机器人臂4,其具有与相应的关节位置变量q1、q2、
…
qn相关联的关节,以及定位在患者6(该患者躺在台上,作为外科机器人平台的一部分5)的体腔内的端部执行器20。对于臂4的任何给定配置,其中此处的“配置”是指一组关节变量q1、q2、
…
qn的特定实例,可以计算速度椭球,该速度椭球是定义可用的最大任务空间线速度的3d表面,端部执行器20可以沿由该3d表面定义的各个方向以该最大任务空间线速度被驱动。这也可以称为可操纵性椭球。椭球可以使用臂4的逆雅可比行列式来计算。速度椭球的最长主轴如图所示,并且其表示可以达到最大任务空间线速度的方向。如果存在所计算的椭球恰好是球体(以虚线示出)的配置,那么在该配置中,臂4被认为是各向同性的—操作者将沿所有方向体验到一致的轻松。
28.在一个方面,通过执行以下用于调节臂的关节空间速度的方法来修改不断更新控制外科机器人臂的活动或机动关节的马达控制命令的数字控制算法。该过程的目标是让操作者沿所有方向体验一致的轻松,因为操作者经由手持式uid14操纵端部执行器20。参考图4的过程流程图(涉及由外科机器人系统中的编程的处理器执行的操作),确定针对给定的外科机器人臂配置的速度椭球的最长主轴(操作404)。这也被称为可操纵性椭球me或线速度me。然而,可以直接计算最长主轴而不必计算整个me,或者最长主轴可以基于首先使用臂4的逆雅可比行列式来计算me,然后检查me以确定最长主轴来确定。
29.接着,将(例如,基于uid跟踪序列的当前元素接收的)任务空间速度应用于最长主轴,以产生新的向量。该新的向量可以被认为是沿最长主轴(或者如果椭球的原点在(0,0,0)处,则沿最长主轴半轴)的方向的最大或最坏情况下的任务空间速度。如果me被归一化为1,则可能需要对该向量进行转换以找到最长主轴上的最大任务空间线速度(例如,以米/秒为单位)。然后应用最大任务空间速度来计算(或被转换成)潜在的关节空间速度(操作406)。这可以使用用于臂4的逆运动学方程(包括逆雅可比行列式)来完成。潜在的关节空间速度表示活动关节需要改变其位置以使端部执行器20表现出最大任务空间速度的速度。
30.该过程然后继续进行操作408,其中计算外科机器人臂4的i)潜在的关节空间速度和ii)关节空间速度极限的比率。关节空间速度极限可以是向量,其分量或值分别指外科机器人臂4的活动关节的最大速度。在一个方面,对于臂4的各种配置,关节空间速度极限(向量)可以保持不变。然后将该比率应用于(例如,乘以)初始关节空间速度,该初始关节空间速度可以是所接收的任务空间速度到关节空间速度的转换,以产生经过调节的关节空间速度(操作410)。
31.如果外科机器人臂配置的关节空间速度极限大于潜在的关节空间速度,则使经过调节的关节空间速度与初始关节空间速度相同(这是从所接收的任务空间速度转换为关节空间的结果)。换句话讲,在这种情况下,初始关节空间速度可以在不变化的情况下应用,以更新马达控制命令。但如果关节空间速度极限小于潜在的关节空间速度,则应用小于1的比
率,作为初始关节空间速度的缩小比例因子。因此,实现沿所有方向的一致的轻松感,因为数字控制算法将以这种方式自动限制任何请求的关节空间速度,使其不超过关节空间速度极限。其实现方式的示例如下。考虑数字控制算法检测臂4的更改配置,并且接收与uid跟踪序列一致的新的任务空间速度(使得端部执行器20可以模拟uid14的跟踪位置和取向)。控制算法(例如,使用包括逆雅可比行列式的逆运动学)将新的任务空间速度转换为新的或初始关节空间速度。在常规方法中,算法将简单地按原样应用新的关节空间速度,以更新控制臂4的机动关节的多个马达控制命令。然而,在此,对于臂4中的多个活动关节中的每一个活动关节,通过沿臂4的当前配置的速度椭球的最长主轴应用所接收的新的任务空间速度,计算相应的潜在的关节速度(例如,产生具有新的任务空间速度范数并且沿最长主轴的方向定向的新的向量)。当相应的潜在的关节速度超过相应关节的关节速度极限时,计算i)关节速度极限和ii)相应的潜在的关节速度之间的比率。
32.然后基于该比率为多个活动关节中的每一个活动关节生成相应的经过调节的关节速度。因此,在这种情况下,关节空间速度极限小于潜在的关节空间速度,并且作为应用该比率的结果,经过调节的关节空间速度小于关节空间速度极限。换句话讲,如果潜在的关节空间速度超过关节空间速度极限一定的阈值量(如通过例如将潜在的关节空间速度与关节空间速度极限进行比较来确定的),则算法通过应用比率来修改新的关节空间速度,以便不超过关节空间速度极限(在应用经过修改的新的关节空间速度以更新马达控制命令之前)。应用经过修改的新的或经过调节的关节空间速度以更新控制外科机器人臂4的多个机动关节(活动关节)的多个马达控制命令。所更新的马达控制命令用于控制臂4的机动关节,使得根据新的uid位置(由uid跟踪序列指示)将端部执行器20驱动到新的任务空间位置。
33.上述过程可以通过计算i)更新的潜在的关节空间速度和ii)外科机器人臂的关节空间速度极限的更新的比率,并且将该更新的比率应用于新的任务空间速度的转换以产生另一个经过调节的关节空间速度来针对新的任务空间速度进行重复。如果臂4的配置不改变,则这可以在不必重新计算最长主轴的情况下完成。
34.当在多个活动关节中存在相应的潜在的关节速度超过相应关节的关节速度极限的两个或多于两个关节时,(使用上述方法)计算若干比率,每一个比率分别针对两个或多于两个关节中的每一个关节。接着,选择这些比率中的最小比率,或者换句话讲,选择相应的潜在的关节速度超过其关节速度极限最多的活动关节。例如,如果关节a和b两者超过了其相应的极限,但关节a超过其极限的程度大于关节b超过其极限的程度,则选择关节a来计算比率。换句话讲,然后选择关节a的相应的潜在的关节速度与(关节a的)关节速度极限的比率,以用于为所有活动关节生成相应的经过调节的关节速度。如上所述,这可以通过将所有活动关节的初始关节空间速度乘以(关节a的)所选择的比率来完成。
35.在臂4的配置不改变的情况下,图4中的过程可以如下继续。在接收(在外科机器人臂4的远侧端部上的)端部执行器的另一个任务空间速度时,如在框406中,通过沿速度椭球的最长主轴应用所述另一个任务空间速度来为活动关节中的每一个活动关节计算另一个相应的潜在的关节速度(因为臂的配置尚未改变,不需要重新计算最长主轴,即,可以省略框404。
36.如果另一个相应的潜在的关节速度不超过相应关节的关节速度极限,则另一个相应的潜在的关节速度保持不变(框410基本上被省略,或等效地,将框410中的比率设置为
1),否则,如果所述另一个相应的潜在的关节速度确实超过了相应关节的关节速度极限,则在框408中计算新的比率。
37.需注意,在一些情况下,可以计算新的比率,而无需计算对应于新的任务空间速度的新的潜在的关节空间速度。这与外科机器人臂的配置发生变化的情况形成对比—在这种情况下,需要使用所更新的最长主轴(即新的配置下的椭球的主轴)来计算新的比率。在例如只有任务空间速度的范数改变(其取向相对于紧接在前或先前的任务空间速度保持不变)的情况下,可以如下所述计算新的比率。在接收新的任务空间速度v_b之后,将其与先前的任务空间速度v_a进行比较,然后通过用v_a/v_b缩放先前的比率来计算新的比率。例如,如果先前的比率为0.6,并且v_b=2*v_a,那么新的比率将为0.3。这是因为关节空间速度极限是固定的,并且最长主轴尚未改变,并且(相对于先前的任务空间速度的)唯一变化是新的任务空间速度的范数。
38.出于解释的目的,前述描述使用特定命名来提供对本发明的透彻理解。然而,对于本领域的技术人员将显而易见的是,实践本发明不需要具体细节。出于举例说明和描述的目的,已经提供了本发明的特定实施方案的前述说明。它们并非旨在为详尽的或将本发明限制为所公开的具体形式;根据上述教导内容可对本公开进行多种修改和改变。选择和描述实施方案是为了最好地解释本发明的原理及其实际应用,从而使得本领域的其他技术人员能够最好地利用本发明和具有适合于所设想的特定用途的各种修改的各种实施方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。