一种小型半自动白菜收割装袋一体机
1.(1)技术领域本发明涉及农业设备技术领域,特别涉及一种小型半自动白菜收割装袋一体机。
2.(2)
背景技术:
现在农户种植的小规模的白菜,在收割的时候,会需要很多的人员进行工作,许多人同时用刀具砍白菜,另外还需要很多人进行装袋,劳动强度非常大,并且效率不高,因此需要一种小型半自动白菜收割装袋一体机,适用于小规模种植的农户,不但节省的人力,还减轻了工作负担,提高收割效率。
3.(3)
技术实现要素:
针对上述问题,本发明提供一种小型半自动白菜收割装袋一体机,方便了农户高效率完成作业。
4.一种小型半自动白菜收割装袋一体机,包括白菜收割机构、白菜传输机构、白菜装袋机构,所述的白菜收割机构活动安装在白菜传输机构的前端,白菜传输机构的后端活动连接白菜装袋机构,白菜装袋机构可以调节白菜装袋深度和上下的高度,方便放置装好的白菜;所述的白菜收割机构包括,滑杆组、滑块组a、控制扶手、圆弧挡板、连接支架、白菜夹紧机构、白菜切割机构、拉伸弹簧、钢丝把手、细钢丝;所述的滑杆组滑动安装在白菜传输机构前端的滑槽架上,滑杆组穿过滑块组a,形成滑动配合;连接支架有三个,滑动安装在滑块组a上形成上下滑动配合;滑块组a下端安装有拉伸弹簧,拉伸弹簧下端与连接支架侧面固定连接,拉伸弹簧产生拉力;圆弧挡板后端有设有细孔,孔内穿过细钢丝,细钢丝下端与白菜夹紧机构固定连接,细钢丝上端穿过圆弧挡板和连接支架与钢丝把手固定连接,钢丝把手滑动安装在控制扶手上,控制扶手固定安装在其中的一个连接支架侧面,连接支架侧面设有滑槽,滑槽之间滑动安装白菜夹紧机构,连接支架的最底端安装有白菜切割机构。
5.优选地,所述的白菜夹紧机构包括:夹板组、滑块组b、钢丝、液压杆、步进电机、钢丝孔、支座;所述的夹板组滑动安装在支座上,在夹板组和支座中间设有弹簧;液压杆的缸体后端与滑块组b上的白菜收割机构0479转动连接,其活塞杆端部与支座槽口处的转轴固定连接;滑块组b滑动安装在连接支架的滑槽里;夹板组设有钢丝孔;钢丝穿过钢丝孔,并且缠绕在步进电机的转动轴上,步进电机固定安装在支座上。
6.优选地,所述的白菜切割机构包括:刀片、伺服电机、电机架、连动杆、刀片上夹片、机械臂、圆弧齿条、齿条轴;所述的刀片有若干片,刀片安装在刀片下夹片和刀片上夹片中间,刀片一角设有轴,所述轴转动安装在刀片的转孔里,刀片上设有圆孔,圆孔里固定插入齿条轴;齿条轴上固定安装圆弧齿条;圆弧齿条与伺服电机轴上的齿轮相互啮合;伺服电机固定安装在电机架上;电机架固定安装在刀片上夹片上;刀片上夹片和刀片下夹片固定连接,在刀片上夹片
和刀片下夹片中间安装有多个刀片,刀片上夹片上面设有弧形凹槽,所述齿条轴滑动安装在刀片上夹片上的弧形凹槽里,齿条轴的上端活动连接到连动杆的孔上,若干连动杆通过齿条轴首尾相连;所述连动杆在刀片上夹片上面;机械臂有三个,机械臂上的白菜收割机构0479固定安装在连接支架的底端侧面。
7.优选地,所述的白菜传输机构包括:盖板a、挡板、连杆a、凸槽、连接轴、推板滑槽、盖板b、连杆b、调节推杆、推杆、车轮、连杆轴、运输滑槽、电缸、圆弧顶杆;所述的盖板a固定安装在主体框架中间上端,盖板a上设有圆弧滑槽,圆弧滑槽和连杆轴形成滑动配合,连杆轴将连杆a和连杆b活动链接在一起;挡板有两个,挡板下端转动安装在主体框架上,连杆轴下端固定连接其中一个挡板的一端,连杆a的轴与另一个挡板固定连接;主体框架的中间设有分叉的三条滑槽,主体框架的后边内槽里安装有凸槽,主体框架的尾部设有连接轴,主体框架的前边上端还固定安装有盖板b,主体框架的侧面滑动安装有调节推杆和推杆,主体框架的底部固定安装有电缸,电缸的活塞杆与圆弧顶杆中间滑槽中的滑动轴固定连接;圆弧顶杆的上端转动安装在主体框架内侧底部的旋转轴上,圆弧顶杆的前端还设有可活动的顶块,主体框架的下端面固定安装有车轮;具体地,通过电缸工作推动圆弧顶杆,圆弧顶杆做圆弧运动,接触白菜底的时候,夹板组松开,圆弧顶杆将白菜顶上,白菜顺着圆弧挡板的弧度,被推在推板滑槽上,手动控制推杆使挡板转动到对应的滑道,每次有一棵白菜换一个滑道。
8.优选地,所述的调节推杆包括:调节推杆内轴、套管a、套管b、推板a;所述的调节推杆内轴一端转动连接在推板a上的短轴上;套管a与调节推杆内轴滑动配合;套管b与套管a转动配合。
9.优选地,所述的白菜装袋机构包括:托板、白菜袋套口、推板b、铰座;所述的托板上安装有铰座;铰座转动安装在连接轴上;托板上设有滑槽,滑槽里滑动安装推板b,托板两侧设有支架,支架上固定安装有白菜袋套口。
10.本发明与现有技术相比的有益效果是:(4)当进行对白菜切割时,白菜切割装置可以实现自动化操控,下方的机械臂可以轻松的拨开白菜周围的叶子,切割刀片也是由电机控制,不需要人去弯腰蹲着砍白菜,减少的劳动的强度,轻松简单。
11.(5)当白菜切割完成后,通过白菜传输机构可以轻松的将白菜移动到装袋区,无需人去搬运,只需要控制机器上的推杆就可以实现,并且白菜传输机构上有三条滑道,可以选择让白菜进入不同的滑道,这样就可以一层一层的装袋,非常的方便轻松。
12.(6)白菜装袋机构连接在白菜传输机构的后边,当白菜输送到后边的时候,白菜传输机构上的凸槽将白菜顶起,使白菜变成站立状态,然后推入袋中,这样就不需要人工去摆正。
13.(7)白菜装袋机构上的白菜袋套口套着袋子,当白菜装满一层的时候,将推板向下移动一棵白菜的距离,就可以继续装下一层,直到装满,装满后,系上口,将推板放平,就可以让装好的白菜缓缓滑下,整个过程省时省力,效率还高。
14.附图说明
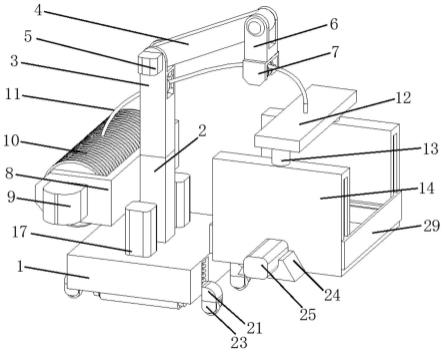
15.图1、图2、图3为本发明的整体结构示意图。
16.图4、图5为本发明的白菜收割机构结构示意图。
17.图6、图7为本发明的白菜夹紧机构的结构示意图。
18.图8为本发明的白菜切割机构的结构示意图。
19.图9为本发明的白菜切割机构的展开结构示意图。
20.图10、图11为本发明的白菜传输机构的结构示意图。
21.图12为本发明的调节推杆的结构示意图。
22.图13为本发明的调节推杆的剖面的结构示意图。
23.图14、图15为本发明的白菜装袋机构的结构示意图。
24.附图标号1-白菜收割机构;2-白菜传输机构;3-白菜装袋机构;101-滑杆组;102-滑块组a;103-控制扶手;104-圆弧挡板;105-连接支架;106-白菜夹紧机构;107-白菜切割机构;108-拉伸弹簧;109-钢丝把手;110-细钢丝;106-1-夹板组;106-2-滑块组b;106-3-钢丝;106-4-液压杆;106-5-步进电机;106-6-钢丝孔;106-7-支座;107-1-刀片;107-2-伺服电机;107-3-电机架;107-4-连动杆;107-5-刀片上夹片;107-6-机械臂;107-7-刀片下夹片;107-8-圆弧齿条;107-9-齿条轴;201-盖板a;202-挡板;203-连杆a;204-凸槽;205-连接轴;206-推板滑槽;207-盖板b;208-连杆b;209-调节推杆;210-推杆;211-车轮;212-连杆轴;213-运输滑槽;214-电缸;215-圆弧顶杆;216-主体框架;209-1-调节推杆内轴;209-2-套管a;209-3-套管b;209-4-推板a;301-托板;302-白菜袋套口;303-推板b;304-铰座。
具体实施方式
25.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
26.在本发明的描述中,需要说明的是,术语“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.实施例如图1-15所示,一种小型半自动白菜收割装袋一体机,包括白菜收割机构1、白菜传输机构2、白菜装袋机构3,所述的白菜收割机构1活动安装在白菜传输机构2的前端,通过调整白菜收割机构1的位置来找准白菜的位置,并进行摘除,白菜传输机构2的上边是白菜运输滑道,将切割好的白菜从前端运往后端,白菜传输机构2的后端活动连接白菜装袋机构3,白菜装袋机构3可以调节白菜装袋深度和上下的高度,方便放置装好的白菜。
28.所述的白菜收割机构1包括,滑杆组101、滑块组a102、控制扶手103、圆弧挡板104、连接支架105、白菜夹紧机构106、白菜切割机构107、拉伸弹簧108、钢丝把手109、细钢丝110;所述的滑杆组101滑动安装在白菜传输机构2前端的滑槽架上,滑杆组101穿过滑块组a102,形成滑动配合;连接支架105有三个,滑动安装在滑块组a102上形成上下滑动配合;滑块组a102下端安装有拉伸弹簧108,拉伸弹簧108下端与连接支架105侧面固定连接,拉伸弹簧108产生拉力;.圆弧挡板104后端有设有细孔,孔内穿过细钢丝110,细钢丝110下端与白菜夹紧机构106固定连接,细钢丝110上端穿过圆弧挡板104和连接支架105与钢丝把手109固定连接,钢丝把手109滑动安装在控制扶手103上,控制扶手103固定安装在其中的一个连接支架105侧面,连接支架105侧面设有滑槽,滑槽之间滑动安装白菜夹紧机构106,连接支架105的最底端安装有白菜切割机构107,当使用的时候,通过手动向下滑动连接支架105进而带动白菜切割机构107和白菜夹紧机构106向下移动,当松开连接支架105,在拉伸弹簧108的作用下将连接支架105往上拉动。
29.本发明实施例的一个可选实施方式中,如图6、图7所示,所述的白菜夹紧机构106包括:夹板组106-1、滑块组b106-2、钢丝106-3、液压杆106-4、步进电机106-5、钢丝孔106-6、支座106-7;1.所述的夹板组106-1滑动安装在支座106-7上,在夹板组106-1和支座106-7中间设有弹簧,弹簧产生弹力,弹簧使三个夹板组106-1向中间集中;液压杆106-4的缸体后端与滑块组b106-2上的白菜收割机构0479转动连接,其活塞杆端部与支座106-7槽口处的转轴固定连接;滑块组b106-2滑动安装在连接支架105的滑槽里;夹板组106-1设有钢丝孔106-6;钢丝106-3穿过钢丝孔106-6,并且缠绕在步进电机106-5的转动轴上,步进电机106-5固定安装在支座106-7上;具体地通过液压杆106-4工作带动支座106-7将白菜初步夹住,然后步进电机106-5工作进而带动白菜收割机构160-白菜装袋机构3松开,进而夹板组106-1和支座106-7中间的弹簧使多个夹板组106-1向中间移动来进一步夹住白菜。
30.本发明实施例的一个可选实施方式中,如图8、图9所示,所述的白菜切割机构107包括:刀片107-1、伺服电机107-2、电机架107-3、连动杆107-4、刀片上夹片107-5、机械臂107-6、圆弧齿条107-8、齿条轴107-9;所述的刀片107-1有若干片,刀片107-1安装在刀片下夹片107-7和刀片上夹片107-5中间,刀片107-1一角设有轴,所述轴转动安装在刀片107-1的转孔里,刀片107-1上设有圆孔,圆孔里固定插入齿条轴107-9;齿条轴107-9上固定安装圆弧齿条107-8;圆弧齿条107-8与伺服电机107-2轴上的齿轮相互啮合;伺服电机107-2固定安装在电机架107-3上;电机架107-3固定安装在刀片上夹片107-5上;刀片上夹片107-5和刀片下夹片107-7固定连接,在刀片上夹片107-5和刀片下夹片107-7中间安装有多个刀片107-1,刀片上夹片107-5上面设有弧形凹槽,所述齿条轴107-9滑动安装在刀片上夹片107-5上的弧形凹槽里,齿条轴107-9的上端活动连接到连动杆107-4的孔上,若干连动杆107-4通过齿条轴107-9首尾相连;所述连动杆107-4在刀片上夹片107-5上面;具体地,通过伺服电机107-2工作带动圆弧齿条107-8进而带动齿条轴107-9,由于齿条轴107-9在刀片上夹片107-5上面的弧形凹槽里滑动,由于连动杆107-4将齿条轴107-9
串联起来,因此一个齿条轴107-9移动,带动多个齿条轴107-9移动进而控制所有刀片107-1来完成收拢或者张开;进而来完成切割白菜;机械臂107-6有三个,机械臂107-6上的白菜收割机构0479固定安装在连接支架105的底端侧面;具体地,白菜收割机构0485包括滑块组a白菜传输机构2、连杆、抓手等,通过滑块组a白菜传输机构2驱动,进而驱动抓手来将白菜周围叶子拨开。
31.本发明实施例的一个可选实施方式中,如图10、图11所示,所述的白菜传输机构2包括:盖板a201、挡板202、连杆a203、凸槽204、连接轴205、推板滑槽206、盖板b207、连杆b208、调节推杆209、推杆210、车轮211、连杆轴212、运输滑槽213、电缸214、圆弧顶杆215;所述的盖板a201固定安装在主体框架216中间上端,盖板a201上设有圆弧滑槽,圆弧滑槽和连杆轴212形成滑动配合,连杆轴212将连杆a203和连杆b208活动链接在一起;挡板202有两个,挡板202下端转动安装在主体框架216上,连杆轴212下端固定连接其中一个挡板202的一端,连杆a203的轴与另一个挡板202固定连接;主体框架216的中间设有分叉的三条滑槽,主体框架216的后边内槽里安装有凸槽204,主体框架216的尾部设有连接轴205,主体框架216的前边上端还固定安装有盖板b207,主体框架216的侧面滑动安装有调节推杆209和推杆210,主体框架216的底部固定安装有电缸214,电缸214的活塞杆与圆弧顶杆215中间滑槽中的滑动轴固定连接;圆弧顶杆215的上端转动安装在主体框架216内侧底部的旋转轴上,圆弧顶杆215的前端还设有可活动的顶块,主体框架216的下端面固定安装有车轮211;具体地,通过电缸214工作推动圆弧顶杆215,圆弧顶杆215做圆弧运动,接触白菜底的时候,夹板组106-1松开,圆弧顶杆215将白菜顶上,白菜顺着圆弧挡板104的弧度,被推在推板滑槽206上,手动控制推杆210使挡板202转动到对应的滑道,每次有一棵白菜换一个滑道。
32.本发明实施例的一个可选实施方式中,如图12、图13所示,所述的调节推杆209包括:调节推杆内轴209-1、套管a209-2、套管b209-3、推板a209-4;所述的调节推杆内轴209-1一端转动连接在推板a209-4上的短轴上;套管a209-2与调节推杆内轴209-1滑动配合;套管b209-3与套管a209-2转动配合;按动套管b209-3把上的按钮使按钮下的顶块卡进套管a209-2的螺旋滑槽内,旋转套管b209-3使套管a209-2向轴方向运动,套管a209-2内壁的卡圈将调节推杆内轴209-1上的弹簧压缩,产生预紧力,调节推杆内轴209-1上的卡块卡在套管a209-2上的直滑槽内,所以不会旋转,只会沿轴方向运动,当调节推杆209滑出推板滑槽206时候,推板a209-4也滑出推板滑槽206,此时弹簧的预紧力将推板a209-4顶偏,顺利顶着白菜根部划入相应的滑道(进入两侧的滑道即向前向或向后旋转,进入中间滑道无需旋转)。
33.本发明实施例的一个可选实施方式中,如图14、图15所示,所述的白菜装袋机构3包括:托板301、白菜袋套口302、推板b303、铰座304;所述的托板301上安装有铰座304;铰座304转动安装在连接轴205上;托板301上设有滑槽,滑槽里滑动安装推板b303,托板301两侧设有支架,支架上固定安装有白菜袋套口302;具体的,白菜袋套口302上套上白菜袋,白菜站立着推入装袋区,当装满一层时手动将推板b303向下推一格,以此类推,直至装满为止,装满后推板b303向后拨动使其躺平,将装好的白菜放在地上。
34.工作原理:本发明在使用时需要两个人操作,一个人控制前边的白菜收割机构1,
另一个人控制后边的白菜传输机构2和白菜装袋机构3;首先通过对控制扶手103的操作使白菜收割机构1下边的圆对准白菜,机械臂107-6中的电动白菜收割机构0498做活塞运动,使机械臂107-6由内向外拨动白菜的外围叶子,随后将通过下压控制扶手103使整个机构向下移动,当刀片上夹片107-5移动到白菜根的附近时,伺服电机107-2工作带动轴上的齿轮转动,齿轮和圆弧齿条107-8配合,将刀片107-1带动,若干刀片107-1向中心收缩,将白菜根部整齐的切断,随后步进电机106-5工作,缠绕在步进电机106-5上的钢丝106-3收紧,产生的收缩力将夹板组106-1收紧,夹板组106-1将切割完成的白菜紧紧夹住,随后拉动钢丝把手109通过细钢丝110连接的夹板组106-1将其拉到上边,此时电缸214工作推动圆弧顶杆215,圆弧顶杆215做圆弧运动,接触白菜底的时候,夹板组106-1松开,圆弧顶杆215将白菜顶上,白菜顺着圆弧挡板104的弧度,被推在推板滑槽206上,手动控制推杆210使挡板202转动到对应的滑道,每次有一棵白菜换一个滑道,随后按动套管b209-3把上的按钮使按钮下的顶块卡进套管a209-2的螺旋滑槽内,旋转套管b209-3使套管a209-2向轴方向运动,套管a209-2内壁的卡圈将调节推杆内轴209-1上的弹簧压缩,产生预紧力,调节推杆内轴209-1上的卡块卡在套管a209-2上的直滑槽内,所以不会旋转,只会沿轴方向运动,当调节推杆209滑出推板滑槽206时候,推板a209-4也滑出推板滑槽206,此时弹簧的预紧力将推板a209-4顶偏,顺利顶着白菜根部划入相应的滑道(进入两侧的滑道即向前向或向后旋转,进入中间滑道无需旋转),当白菜推入白菜传输机构2后边时,凸槽204卡住白菜上端,将白菜立起来,在白菜袋套口302上套上白菜袋,白菜站立着推入装袋区,当装满一层时手动将推板b303向下推一格,以此类推,直至装满为止,装满后推板b303向后拨动使其躺平,将装好的白菜放在地上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。