:
1.本发明属于太赫兹时域光谱技术领域,具体涉及一种基于脉冲太赫兹波的管道生产过程中参数测量装置及方法。
背景技术:
2.在管道的生产过程中,需要实现管道壁厚、分层壁厚、内径、外径、同心度等参数的在线检测,可以通过这些参数的“异常”快速定位到生产过程中的问题,反馈并指导生产过程。
3.目前市面上常用的管道测厚设备原理为超声测厚,即根据超声波脉冲反射原理来进行厚度测量。当探头发射的超声波脉冲通过被测物体到达材料分界面时,脉冲被反射回探头,通过精确测量超声波在材料中传播的时间来确定被测材料的厚度。但是,超声波的传播是需要介质的,这就需要超声测量设备的探头紧贴被测材料。但是,在管道的生产过程中,管道成形时温度极其高,无法近距离接触管道,并且高温对超声也有影响,使得测试结果不准确。受这些测试环境、测试场景的限制,对于一些超声测厚设备无法近距离接触的材料,必须远距离测试,这就需要先将管道冷却到一定温度,并借助其他的介质使得超声波能够到达被测材料并反射回来,这无疑加大了测试的难度,增加了测试的复杂性,引入了测试误差,并且测试结果有明显的滞后性。
技术实现要素:
4.本发明目的在于克服现有技术存在的缺点,寻求设计一种基于脉冲太赫兹波的管道生产过程中参数测量装置及方法。
5.为了实现上述目的,本发明采用以下技术方案:本发明涉及的一种基于脉冲太赫兹波的管道生产过程中参数测量装置,包括集成式太赫兹探头、太赫兹测厚度单元和太赫兹探头移动单元,太赫兹测厚度单元分别与集成式太赫兹探头和太赫兹探头移动单元连接,集成式太赫兹探头置于待测管道一侧,用于脉冲太赫兹波的产生和探测,集成式太赫兹探头发出的太赫兹波指向待测管道圆心,集成式太赫兹探头固定在太赫兹探头移动单元上,太赫兹探头移动单元带动太赫兹探头沿待测管道半径所在直线方向往复运动寻找最佳检测位置,所述最佳位置指太赫兹波峰峰值最大时集成式太赫兹探头所在位置,太赫兹测厚度单元与集成式太赫兹探头连接,基于集成式太赫兹探头反馈的信号判断最佳检测位置时并根据最佳检测位置时集成式太赫兹探头反馈的太赫兹信号计算管道壁厚b。
6.所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括显示处理装置,太赫兹测厚度单元与显示处理装置连接,显示处理装置用于处理和/或显示接收到的结果并协调各部件之间的工作。
7.本发明涉及的一种基于脉冲太赫兹波的管道生产过程中参数测量装置,包括圆环、控制基座、第一激光测距雷达、第二激光测距雷达、左直线运动单元、右直线运动单元、
上直线运动单元、下直线运动单元和对心单元,太赫兹探头移动单元固定在圆环上且集成式太赫兹探头发出的发射光指向圆环圆心,第一激光测距雷达、第二激光测距雷达分别固定在圆环一直径两端,圆环左右两端分别通过左直线运动单元和右直线运动单元固定在控制基座,左直线运动单元和右直线运动单元带动圆环沿控制基座上下移动,圆环上下两端分别通过上直线运动单元和下直线运动单元固定在控制基座上,上直线运动单元和下直线运动单元带动圆环沿控制基座左右移动,对心单元分别与第一激光测距雷达、第二激光测距雷达、左直线运动单元、右直线运动单元、上直线运动单元和下直线运动单元连接,待测管道置于圆环内,对心单元通过控制左直线运动单元、右直线运动单元、上直线运动单元和下直线运动单元工作带动圆环上下左右运动,使θ1=θ2=0
°
,d1=d2,其中,θ1和θ2分别为第一激光测距雷达、第二激光测距雷达测得的入射光和反射光之间的夹角,d1和d2分别是第一激光测距雷达、第二激光测距雷达与待测管道外壁之间的距离。
8.具体地,所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括激光测距单元,所述激光测距单元与显示处理装置连接,当θ1=θ2=0时,计算待测管道外径d和管道内径d,d=a-d
1-d2,d=d-2h,其中,a为第一激光测距雷达和第二激光测距雷达之间的距离,h为管道厚度。
9.所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括360
°
旋转运动单元,360
°
旋转运动单元分别与显示处理装置和圆环连接,360
°
旋转运动单元基于显示处理装置20的控制指令带动圆环绕圆心转动。
10.具体地,360
°
旋转运动单元包括外齿轮、内齿轮、马达和固定架,内齿轮和圆环同圆心固定连接,环向均匀布置的若干个外齿轮与内齿轮啮合,每一个外齿轮与对应马达连接,外齿轮固定在固定架上,左直线运动单元、右直线运动单元、上直线运动单元、下直线运动单元分别通过固定架固定在控制基座上。
11.所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括水平运动单元,水平运动单元分别与显示处理装置和控制基座连接,水平运动单元基于显示处理装置发来的控制指令带动控制基座沿待测管道圆心轴线方向运动。
12.具体地,所述控制基座为方管连接而成的正方形框架,左直线运动单元、右直线运动单元、上直线运动单元、下直线运动单元分别与正方形框架左、右、前、后侧的方管连接,圆环置于正方形框架一侧,待测管道穿过正方形框架和圆环的中心。
13.所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括模式设置单元,模式设置单元中包括单点测量模式、多点线形测量模式、多点螺旋测量模式和多点同步测量模式四种选择模式,所述单点测量模式用于对待测管道进行定点厚度扫描,所述多点线形测量模式用于对待测管道进行连续多点厚度扫描,多点螺旋测量模式用于对待测管道进行连续螺旋多点厚度扫描,多点同步测量模式用于对待测管道进行定点周向厚度扫描。
14.一种基于脉冲太赫兹波的管道生产过程中参数测量方法,具体包括以下步骤:
15.(1)将待测管道置于测试系统中,第一激光测距雷达、第二激光测距雷达向待测管道发出激光,将测得的第一激光测距雷达、第二激光测距雷达测得的入射光和反射光之间的夹角θ1和θ2以及第一激光测距雷达、第二激光测距雷达与待测管道外壁之间的距离d1和d2,实时发送到显示处理装置;
16.(2)对心单元获取θ1、θ2、d1和d2,控制左直线运动单元、右直线运动单元、上直线运
动单元和下直线运动单元工作带动圆环上下左右运动,使θ1=θ2=0
°
,d1=d2,完成圆环圆心和待测管道圆心对准操作;
17.(3)太赫兹探头移动单元带动集成式太赫兹探头运动至太赫兹波峰峰值最大时停止,完成太赫兹探头预置位;
18.(4)输入管道基础参数;
19.(5)在模式设置单元选择模式并设定相关的参数,所述模式包括单点测量模式、多点线形测量模式、多点螺旋测量模式和多点同步测量模式四种选择模式,所述单点测量模式用于对待测管道进行定点厚度扫描,所述多点线形测量模式用于对待测管道进行连续多点厚度扫描,多点螺旋测量模式用于对待测管道进行连续螺旋多点厚度扫描,多点同步测量模式用于对待测管道记性定点周向厚度扫描;
20.(6)按照步骤(5)选择的模式和设定的参数,水平运动单元和/或旋转运动单元运动,过程中,激光测距单元7基于d1和d2计算待测管道外径d和管道内径d,d=a-d
1-d2,d=d-h,太赫兹测厚度单元2基于集成式太赫兹探头1反馈的太赫兹信号计算管道壁厚b,并将结果实时发送到显示处理装置20处理显示。
21.本发明与现有技术相比具有以下有益效果:不受温度的影响,无需借助其余介质,即可进行快速测量,不会引入其余误差;自动中心对准操作,提高了测量的准确性;实现管道参数的在线测量,并且不是单一的厚度显示,可同步显示壁厚、分层壁厚、内径、外径、同心度等参数;能够反馈并指导生产过程,减少由于测量滞后性而生产的不合格管道,减少因其带来的时间、原料等的多方损失。
附图说明:
22.图1为实施例1中基于脉冲太赫兹波的管道生产过程中参数测量装置结构示意图。
23.图2为实施例1中基于脉冲太赫兹波的管道厚度测量的原理示意图。
24.图3为实施例1中基于脉冲太赫兹波的管道生产过程中参数测量装置立体图。
25.图4为实施例1中基于脉冲太赫兹波的管道生产过程中参数测量装置部分结构立体图。
26.图5为实施例1中激光测距原理结构示意图。
27.图6为图3的侧视图。
28.图7为图6中bb剖视图。
29.图8为图6中aa剖视图。
30.图9为实施例1中基于脉冲太赫兹波的管道生产过程中参数测量装置结构原理示意图。
31.图10为单点测量模式的示意图。
32.图11为多点线形测量模式的示意图。
33.图12为多点螺旋测量模式的示意图。
34.图13为多点同步测量模式的示意图。
35.图14为管道壁厚在线测量的流程图。
具体实施方式:
36.下面通过具体实施例并结合附图对本发明作进一步说明。
37.实施例1
38.太赫兹波是处于微波和红外线之间的一段电磁波,相对其他波段的电磁波,它具有很多独特的属性,比如说,太赫兹波对大部分无机、非金属材料均有良好的穿透性(如pp、pvc、pe等),而大量管道所使用的材料也正是具有这些属性,因此太赫兹波对大部分管道管壁均有良好的穿透性,可确保获取信噪比良好的多层反射信号;基于超快光电子学原理产生的太赫兹脉冲具有极短的脉冲宽度,一般在亚皮秒量级,这意味着太赫兹波在传播方向上有优异的空间分辨能力,1ps脉冲宽度理论可达到的空间分辨率为30μm,这对于薄壁管道测量是极具优势的;太赫兹光子相对同样具有透射能力的x射线能量更低,不会引起电离,是对人体安全的,这种属性使得太赫兹波非常适用于工业产线;太赫兹波与分子相互作用,将在光谱固有位置展现出吸收带,这些吸收带客观反映了物质的成分,可用于包括成分鉴定、含水量鉴定等辅助参数的获取。以上这些属性使得太赫兹波用于管道厚度测量具有其他技术不可比拟的优势。
39.基于此,本实施例提出了一种基于脉冲太赫兹波的管道生产过程中参数测量装置及方法。太赫兹时域脉冲的高空间分辨、高时间分辨以及信号温度不敏感的特征,将在管道生产过程中提供更加稳定可靠的测量数据,特别是面向多层薄壁管道,无需引入其他介质,无需考虑高温对测试的影响,即可实现壁厚、管径等参数的实时在线测量,在管道成形早期开展监测。
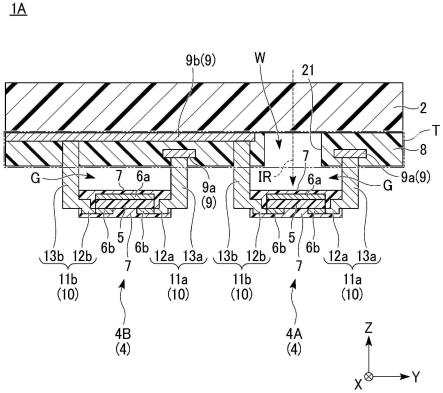
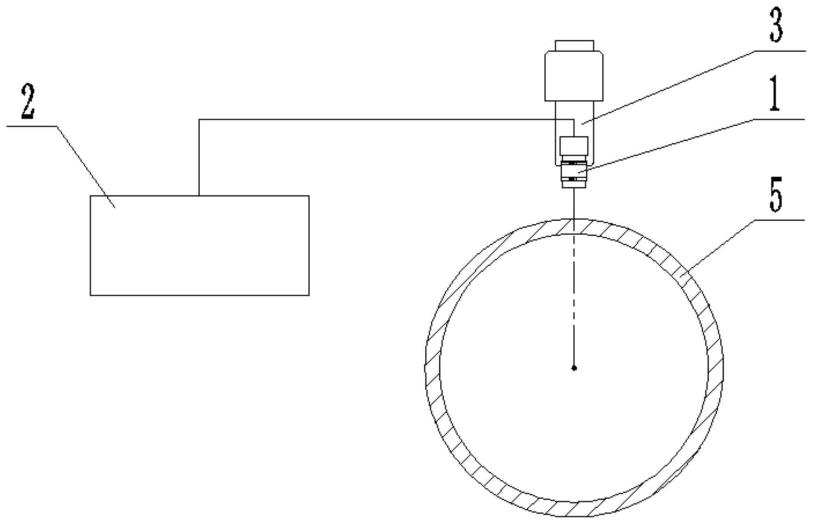
40.如图1所示,本实施例涉及的一种基于脉冲太赫兹波的管道生产过程中参数测量装置,包括集成式太赫兹探头1、太赫兹测厚度单元2和太赫兹探头移动单元3,太赫兹测厚度单元2分别与集成式太赫兹探头1和太赫兹探头移动单元3连接,集成式太赫兹探头1置于待测管道5一侧,用于脉冲太赫兹波的产生和探测,集成式太赫兹探头1发出的太赫兹波指向待测管道5圆心(或垂直于待测管道5圆心轴线),集成式太赫兹探头1固定在太赫兹探头移动单元3上,太赫兹探头移动单元3带动太赫兹探头沿待测管道5半径所在直线方向往复运动寻找最佳检测位置,所述最佳位置指太赫兹波峰峰值最大时集成式太赫兹探头1所在位置,太赫兹测厚度单元2与集成式太赫兹探头1连接,基于集成式太赫兹探头1反馈的信号判断最佳检测位置时并根据最佳检测位置时集成式太赫兹探头1反馈的太赫兹信号计算管道壁厚b。具体地,太赫兹测厚度单元2为现有的太赫兹测厚度系统主机。
41.如图2所示,集成式太赫兹探头1发射脉冲太赫兹波,太赫兹波到达待测管道5后,在管道的壁上发生反射返回集成式太赫兹探头1,其中第一个峰为管道第一个表面的反射峰,第二个峰为管道第二个表面的反射峰,第三个峰为管道第三个表面的反射峰,太赫兹测厚单元2根据太赫兹飞行时间(fot)测量管壁厚度。具体为:集成式太赫兹探头1发射脉冲太赫兹波,太赫兹波到达待测管道5后,在管道的壁上发生反射,反射信号再次进入集成式太赫兹探头2并记录飞行时间和幅值,通过寻峰算法准确获取峰值位置,从图2的波形中可获得峰值延迟时间t,在已知材料折射率n的情况下即可计算得出管道的厚度信息h,
42.公式如下:
43.为了实现对待测管道5厚度的准确测量,测量过程中需要保证集成式太赫兹探头1
发出的发射光指向待测管道5圆心,即集成式太赫兹探头1发出的发射光垂直于管道中心轴线,本实施例具体采用以下实现方式。
44.如图3所示,所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括显示处理装置20,太赫兹测厚度单元2与显示处理装置20连接,显示处理装置20用于处理和/或显示接收到的结果并协调各部件之间的工作。显示处理装置20包括显示器、主机和相应处理软件的计算机支撑系统。
45.如图4、5和9所示,本实施例涉及的一种基于脉冲太赫兹波的管道生产过程中参数测量装置,包括圆环4、控制基座6、第一激光测距雷达8、第二激光测距雷达9、左直线运动单元10、右直线运动单元11、上直线运动单元12、下直线运动单元13和对心单元14,太赫兹探头移动单元3固定在圆环4上且集成式太赫兹探头1发出的发射光指向圆环4圆心,第一激光测距雷达8、第二激光测距雷达9分别固定在圆环4一直径两端,圆环4左右两端分别通过左直线运动单元10和右直线运动单元11固定在控制基座6,左直线运动单元10和右直线运动单元11带动圆环4沿控制基座6上下移动,圆环4上下两端分别通过上直线运动单元12和下直线运动单元13固定在控制基座6上,上直线运动单元12和下直线运动单元13带动圆环4沿控制基座6左右移动,对心单元14分别与第一激光测距雷达8、第二激光测距雷达9、左直线运动单元10、右直线运动单元11、上直线运动单元12和下直线运动单元13连接,待测管道置于圆环4内,对心单元14通过控制左直线运动单元10、右直线运动单元11、上直线运动单元12和下直线运动单元13工作带动圆环4上下左右运动,使θ1=θ2=0
°
,d1=d2,其中,θ1和θ2分别为第一激光测距雷达8、第二激光测距雷达9测得的入射光和反射光之间的夹角,d1和d2分别是第一激光测距雷达8、第二激光测距雷达9与待测管道5外壁之间的距离。上直线运动单元12、下直线运动单元13运动时,左直线运动单元10和右直线运动单元11不会对其产生干涉,反之亦然。具体地,对心单元14是显示处理装置20的一部分。
46.具体地,如图5所示,第一激光测距雷达8、第二激光测距雷达9分别发出激光(入射光),激光遇到待测管道5返回(反射光),激光照射到待测管道5表面,两束对射的激光分别在待测管道5表面上形成两个亮的光斑,光斑的位置及形状、反射光返回的时间及距离被激光测距雷达内的传感器所探测,对心单元14获取第一激光测距雷达8、第二激光测距雷达9测得的入射光和反射光之间的夹角θ1和θ2以及第一激光测距雷达8、第二激光测距雷达9与待测管道5外壁之间的距离d1和d2(d1和d2分别是第一激光测距雷达8、第二激光测距雷达9发射到待测管道外壁上的入射光长度),启动自对心程序,此时圆环4在左直线运动单元10和右直线运动单元11的带动下上下运动,待获取到的角度θ1=θ2=0
°
时停止(此时,圆环4与待测管道5水平方向上的直径重合),再在上直线运动单元12和下直线运动单元13带动下左右运动,待获取到的d1=d2(即d1'=d2')时停止(此时,圆环4与待测管道5垂直方向上的直径重合),至此完成圆环4圆心和待测管道5圆心对准操作。
47.由于集成式太赫兹探头1发出的太赫兹波指向圆环4圆心,圆环4圆心和待测管道5圆心对齐后,集成式太赫兹探头1发出的太赫兹波指向待测管道5圆心。上述实现方式不仅能够实现集成式太赫兹探头1发出的太赫兹波指向待测管道5圆心,方便地测量待测管道5的厚度h,还能够测量管道的内径d和外径d。具体地,如图3和9所示,所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括激光测距单元7,所述激光测距单元7与显示处理装置20连接,当θ1=θ2=0时,计算待测管道外径d和管道内径d,d=a-d
1-d2,,d=d-2h,
其中,a为第一激光测距雷达8和第二激光测距雷达9之间的距离,h为管道厚度。具体地,激光测距单元7为现有的激光测距系统主机。
48.如图9所示,所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括360
°
旋转运动单元,360
°
旋转运动单元分别与显示处理装置20和圆环4连接,360
°
旋转运动单元基于显示处理装置20的控制指令带动圆环4绕圆心转动。待测管道5圆心与圆环4圆心对齐后,通过360
°
旋转运动单元可使待测管道5与圆环4绕圆心轴线相对转动,进而测量管道周向上任意一点的管壁厚度、管道内径和外径。
49.具体地,如图4、6、7和8所示,360
°
旋转运动单元包括外齿轮14、内齿轮15、马达16和固定架17,内齿轮15和圆环4同圆心固定连接,环向均匀布置的若干个外齿轮14与内齿轮15啮合,每一个外齿轮14与对应马达16连接,外齿轮14固定在固定架17上,左直线运动单元10、右直线运动单元11、上直线运动单元12、下直线运动单元13分别通过固定架17固定在控制基座6上。将待测管道5放置在圆环4内,在马达16的带动下,外齿轮14转动,依次带动内齿轮15和圆环4转动,进而带动集成式太赫兹探头1、第一激光测距雷达8、第二激光测距雷达9绕待测管道5转动,实现待测管道5圆周方向任一点管道壁厚、管道内径和外径的测量。
50.如图9所示,所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括水平运动单元,水平运动单元分别与显示处理装置20和控制基座6连接,水平运动单元基于显示处理装置20发来的控制指令带动控制基座6沿待测管道圆心轴线方向运动。待测管道5圆心与圆环4圆心对齐后,通过水平运动单元可使待测管道5与圆环4沿圆心轴线方向相对运动,进而测量管道长度方向上任意一点的管壁厚度、管道内径和外径。具体地,如图3和6所示,水平运动单元包括固定在底板上的轨道18和与轨道18配合的滑块19,滑块19固定在控制基座6底部。
51.具体地,所述控制基座6为方管连接而成的正方形框架,左直线运动单元10、右直线运动单元11、上直线运动单元12、下直线运动单元13分别与正方形框架左、右、前、后侧的方管连接,圆环4置于正方形框架一侧,待测管道5穿过正方形框架和圆环4的中心。
52.所述一种基于脉冲太赫兹波的管道生产过程中参数测量装置,还包括模式设置单元21,模式设置单元中包括单点测量模式、多点线形测量模式、多点螺旋测量模式和多点同步测量模式四种选择模式,所述单点测量模式用于对待测管道进行定点厚度扫描,所述多点线形测量模式用于对待测管道进行连续多点厚度扫描,多点螺旋测量模式用于对待测管道进行连续螺旋多点厚度扫描,多点同步测量模式用于对待测管道进行定点周向厚度扫描。模式设置单元21显示处理装置20中的一部分。
53.一种基于脉冲太赫兹波的管道生产过程中参数测量方法,具体包括以下步骤:
54.(1)将待测管道置于测试系统中,第一激光测距雷达8、第二激光测距雷达9向待测管道发出激光,将测得的第一激光测距雷达8、第二激光测距雷达9测得的入射光和反射光之间的夹角θ1和θ2以及第一激光测距雷达8、第二激光测距雷达9与待测管道5外壁之间的距离d1和d2,实时发送到显示处理装置20;
55.(2)对心单元14获取θ1、θ2、d1和d2,控制左直线运动单元10、右直线运动单元11、上直线运动单元12和下直线运动单元13工作带动圆环4上下左右运动,使θ1=θ2=0
°
,d1=d2,完成圆环4圆心和待测管道5圆心对准操作;
56.(3)太赫兹探头移动单元3带动集成式太赫兹探头1运动至太赫兹波峰峰值最大时
停止,完成太赫兹探头预置位;
57.(4)输入管道基础参数,如折射率c;
58.(5)在模式设置单元21选择模式并设定相关的参数;
59.(6)按照步骤(5)选择的模式和设定的参数,水平运动单元和/或旋转运动单元运动,过程中,激光测距单元7基于d1和d2计算待测管道外径d和管道内径d,d=a-d
1-d2,d=d-h,太赫兹测厚度单元2基于集成式太赫兹探头1反馈的太赫兹信号计算管道壁厚b,并将结果实时发送到显示处理装置20处理显示;
60.如图10所示,单点测量模式:
61.当管道处于静止状态时,设定控制基座6沿轨道的步进速度v2和步进距离l,水平运动单元带动控制基座6沿轨道以速度v2步进距离l停止,对该点进行数据采集;
62.当管道以速度v1运动时,设定控制基座6沿轨道的步进速度v2,v2<v1或v2=0,水平运动单元带动控制基座6沿轨道以速度v2到达探测点,进行定点厚度扫描。该模式适用于对管道固定位置进行点检,主要为确定位置的厚度情况,作为成品质量判断的依据。
63.如图11所示,多点线形测量模式:
64.当管道处于静止状态时,设定控制基座6沿轨道的步进速度v2',水平运动单元带动控制基座6沿轨道以速度v2'对管道进行实时连续扫描;
65.当管道以速度v1运动时,设定控制基座6沿轨道的步进速度v2'(v2'<v1或v2'=0),对管道进行实时连续扫描,实时采集数据。该模式是管道在线测量的基础模式,可对管道关注区域进行连续厚度测量。
66.如图12所示,多点螺旋测量模式:
67.当管道处于静止状态时,设定控制基座6沿轨道的步进速度v2',圆环的转动速度w,水平运动单元带动控制基座6沿轨道以速度v2'步进,360
°
旋转运动单元带动圆环相对待测管道以速度w转动,对管道进行实时螺旋扫描;
68.当管道以速度v1运动时,设定控制基座6沿轨道的步进速度v2'(v2'<v1或v2'=0),圆环的转动速度w,水平运动单元带动控制基座6沿轨道以速度v2'步进,同时360
°
旋转运动单元带动圆环相对待测管道以速度w转动,对管道进行螺旋扫描。该模式可应用于管道在线测量,并可对运动中的管道进行360
°
多点扫描测厚。
69.如图12所示,多点同步测量模式:
70.当管道处于静止状态时,设定控制基座6沿轨道的步进速度v2和步进距离l,圆环的转动速度w,水平运动单元带动控制基座6沿轨道以速度v2步进距离l停止,然后360
°
旋转运动单元带动圆环相对待测管道以速度w转动一周,沿周向对管道进行连续扫描;
71.当管道以速度v1运动时,可设置控制基座6沿水平运动导轨的运动速度为v2(v2<v1或v2=0),水平运动单元带动控制基座6沿轨道以速度v2到达探测点,设置控制基座6沿水平运动导轨的运动速度为v1,圆环的转动速度w,控制基座6与管道以v1同步运动,同时360
°
旋转运动单元带动圆环相对待测管道以速度w转动一周,并实时采集数据,以此类推,完成测量。该模式在单点测量模式的基础上,增加旋转扫描,可应用于管道在线测量,可获取管道相同截面位置的厚度数据。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。