1.本发明涉及雷达物位计系统并且涉及确定罐中的产品的物位的方法。
背景技术:
2.雷达物位计系统广泛用于测量罐中的填充物位。通常借助于非接触式测量或借助于通常被称为导波雷达(gwr)的接触式测量来执行雷达物位计量,借助于非接触式测量,朝向罐中包含的产品辐射电磁信号,借助于接触式测量,通过探头将电磁信号朝向产品导引并将电磁信号导引到产品中。探头通常竖直地布置在罐中。电磁信号在产品的表面处被反射,并且通过包括在雷达物位计系统中的接收器或收发器接收反射的信号。基于发射的信号和反射的信号,可以确定到产品的表面的距离。
3.更具体地,通常基于电磁信号的发射与电磁信号在罐中的气氛与罐中包含的产品之间的界面中的反射的接收之间的时间来确定到产品的表面的距离。为了确定产品的实际填充物位,基于上述时间(所谓的飞行时间)和电磁信号沿探头的传播速度来确定从参考位置到表面的距离。
4.除了罐中的气氛与产品之间的界面处(以及在适用的情况下其他材料界面处)的反射以外,通常还存在靠近罐底部的探头端部处的反射。在大多数目前可用的gwr型雷达物位计系统中,在探头端部处的这种反射阻碍了对靠近探头端部的填充物位的准确确定。阻碍了对填充物位的准确确定的填充物位范围可以被称为下死区或盲区。
5.为了避免或者减小同轴双导体探头的下死区,ep 2012 098提出用探头端部处的螺旋弹簧将内导体和外导体感应地连接。内导体与外导体之间的感应连接延迟了来自探头端部的反射(回波),并且根据ep 2012098,通过选择内导体与外导体之间的连接的电感可以减小甚至避免下死区。
6.然而,较高的电感要求内探头导体与外探头导体之间的较长和/或较窄的电连接,这在不要求制造方面的较高精度和/或不牺牲探头的一些鲁棒性的情况下可能难以实现。
技术实现要素:
7.考虑到上述情况,将期望提供改进的gwr型雷达物位计系统,特别是具有减小的下死区的更鲁棒和/或生产友好的gwr型雷达物位计系统。
8.根据本发明的第一方面,因此提供了使用雷达物位计系统确定罐中的产品的物位的方法,该雷达物位计系统包括:收发器;探头,该探头被布置成从耦接至收发器的第一探头端部朝向产品延伸并且进入产品中,延伸到第二探头端部,该探头包括通过第二探头端部处的探头终端布置彼此导电地耦接的第一探头导体和第二探头导体;以及处理电路,该方法包括以下步骤:通过收发器生成和发射电磁发射信号;通过探头将发射信号朝向产品导引并将该发射信号导引到产品中;通过探头返回由发射信号在产品的表面处和在第二探头端部处的反射而产生的电磁反射信号;通过收发器接收反射信号;基于反射信号以及反射信号与发射信号之间的时序关系来确定回波信号,该回波信号表现出随指示沿探头的位
置的传播参数而变化的回波信号强度;以及通过处理电路,基于下述传播参数值以及下述偏移来确定产品的表面的物位,上述传播参数值指示针对其的回波信号已经达到预定的阈值信号强度的、沿探头的第一阈值位置,上述偏移指示从第一阈值位置朝向第二探头端部的、沿探头的偏移距离。
[0009]“收发器”可以是能够发射和接收电磁信号的一个功能单元,或者可以是包括分立的发射器单元和接收器单元的系统。
[0010]
罐可以是能够容纳产品的任何容器或器皿,并且可以是金属的或者部分或完全非金属的、开口的、半开口的或者封闭的。
[0011]
传播参数可以是指示沿探头的位置的任何参数。例如,传播参数可以是以下中的任何一个:反射信号的飞行时间、距第一探头端部处的参考位置的距离、罐中的物位等。
[0012]
本发明基于以下认识:如果可以根据回波信号中由来自产品的表面处的反射的回波信号与来自探头的第二端部处的反射的回波信号的组合形成的复合峰来确定产品的表面的物位,则在没有高电感探头终端的情况下就可以减小乃至避免下死区。
[0013]
本发明人还认识到这可以通过以下来实现:至少当产品的表面的物位靠近第二探头端部时,基于回波信号强度达到预定阈值的、沿探头的位置以及从该位置朝向第二探头端部的偏移距离来确定该物位。
[0014]
由此,可以使得探针终端布置更加鲁棒,因为在不牺牲减小或避免下死区的能力的情况下电感可以较低。这可能使雷达物位计系统对损坏和干扰较不敏感,并且因此适合更大范围的应用。此外,可以减小对探头的制造公差的要求,使得制造和/或在罐处的安装更简单并且更具成本效益。
[0015]
偏移可以有利地是预定的值,或者可以基于至少一个测量特性例如温度或者系统特定特性从一组预定的值中选择。此外,偏移可以取决于第二物质的至少一种材料特性,例如第二物质的介电常数。例如,可以仅基于指示发射信号在产品的表面处的反射的估计的回波信号来确定偏移。替选地或组合地,当产品的表面与第二探头端部充分分离以使在产品的表面处的反射产生回波信号中的孤立的峰时,可以基于由发射信号在产品的表面处的反射而产生的一个或数个回波信号来确定偏移。回波信号中的这样测量到的孤立的峰可以用于建立峰的数学模型。数学模型(其可以是简单的(如以下将进一步描述的)或者更加复杂的)可以用于确定针对给定阈值信号强度的偏移。
[0016]
根据实施方式,此外,发射信号可以包括具有第一脉冲重复频率的第一脉冲串;并且方法还可以包括以下步骤:通过收发器生成具有第二脉冲重复频率的第二脉冲串形式的电磁参考信号,该第二脉冲重复频率被控制成与第一脉冲重复频率相差频率差;并且可以基于反射信号、参考信号和频率差来确定回波信号。
[0017]
第一脉冲串中的脉冲可以有利地是所谓的dc脉冲。
[0018]
应当注意,除非明确或暗含地要求,否则根据本发明的实施方式的方法的步骤不一定需要以任何特定顺序执行。
[0019]
根据本发明的第二方面,提供了用于确定罐中的产品的物位的雷达物位计系统,该雷达物位计系统包括:收发器,该收发器用于生成、发射和接收电磁信号;探头,该探头被布置成从耦接至收发器的第一探头端部朝向产品延伸并且进入产品中,延伸到第二探头端部,该探头包括通过第二探头端部处的探头终端布置彼此导电地耦接的第一探头导体和第
二探头导体;回波信号形成电路,该回波信号形成电路连接至收发器,用于基于反射信号以及反射信号与发射信号之间的时序关系来形成回波信号,该回波信号表现出随指示沿探头的位置的传播参数而变化的回波信号强度;以及物位确定电路,该物位确定电路连接至回波信号形成电路,用于基于下述传播参数值以及下述偏移来确定罐中的产品的物位,上述传播参数值指示针对其的回波信号已经达到预定的阈值信号强度的、沿探头的第一阈值位置,上述偏移指示从第一阈值位置朝向第二探头端部的、沿探头的偏移距离。
[0020]
根据实施方式,探针终端布置可以提供第一探头导体与第二探头导体之间的高于约1nh且低于约30nh的电感。
[0021]
通过将探针终端布置配置成提供上述范围内的电感,可以实现鲁棒性与减小第二探头端部处的死区之间的有利折衷。
[0022]
本发明的该第二方面的其他实施方式以及通过本发明的该第二方面获得的效果在很大程度上类似于以上针对本发明的第一方面描述的实施方式和效果。
[0023]
总之,本发明因此涉及确定罐中的产品的物位的方法,该方法包括:生成和发射电磁发射信号;将发射信号朝向产品导引并将该发射信号导引到产品中;返回由发射信号的反射而产生的电磁反射信号;接收反射信号;基于反射信号以及反射信号与发射信号之间的时序关系来确定回波信号,该回波信号表现出随指示沿探头的位置的传播参数而变化的回波信号强度;以及基于下述传播参数值以及下述偏移来确定产品的表面的物位,上述传播参数值指示针对其的回波信号已经达到预定的阈值信号强度的、沿探头的第一阈值位置,上述偏移指示从第一阈值位置朝向第二探头端部的、沿探头的偏移距离。
附图说明
[0024]
现在将参照示出本发明的示例实施方式的附图更详细地描述本发明的这些和其他方面,在附图中:
[0025]
图1示意性地示出了包括根据本发明的实施方式的雷达物位计系统的示例罐布置;
[0026]
图2是包括在图1中的雷达物位计系统中的测量电子单元的示意图示;
[0027]
图3是根据本发明的实施方式的雷达物位计系统的部分示意性框图;
[0028]
图4是示意性地示出了根据本发明的方法的示例实施方式的流程图;
[0029]
图5a示意性地示出了发射信号、反射信号以及参考信号的示例;
[0030]
图5b是图5a中的发射信号和参考信号的一部分的部分放大视图;
[0031]
图6a至图6b示意性地示出了针对罐中的产品的表面靠近探头的第二端部的示例情况由图5a中的表面反射信号与参考信号的时间相关产生的回波信号。
[0032]
图7a至图7d示出了包括在图1中的雷达物位计系统中的探头终端布置的示例配置。
具体实施方式
[0033]
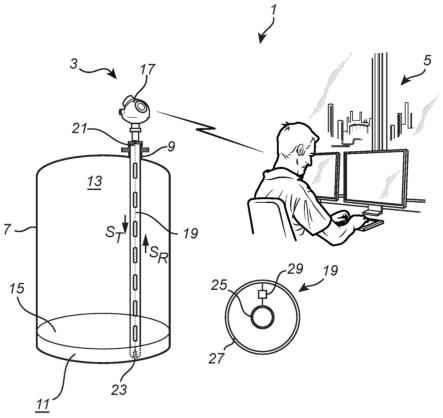
图1示意性地示出了物位测量系统1,该物位测量系统1包括根据本发明的示例实施方式的雷达物位计系统3和被示为控制室的主机系统5。
[0034]
gwr(导波雷达)型的雷达物位计系统3布置在罐7处,该罐7具有从罐7的顶部基本
上竖直延伸的管状安装结构9(通常被称为“喷管”)。
[0035]
在本示例性测量情况下,罐7包含产品11和在产品11上方的罐气氛13。罐气氛13可以是空气或蒸汽,并且产品11可以例如是油或可以通过探头将电磁信号导引穿过的其他液体。
[0036]
安装雷达物位计系统3以测量产品11的表面15的物位。雷达物位计系统3包括布置在罐7外部的测量电子单元17和探头19,该探头19从耦接至测量电子单元17的第一探头端部21,延伸穿过管状安装结构9,朝向产品11延伸并且进入产品11中,延伸到罐7底部处的第二探头端部23。在图1中的示例测量情况下,产品11的表面15被示出为在可能对于各种现有雷达物位计系统而言所谓的下死区或盲区之内的物位处靠近第二探头端部23。
[0037]
如图1中特别是在从探头19的第二端部23观察的放大的示意功能视图中示意性示出的,探头19具有第一探头导体25、第二探头导体27以及将第一探头导体25导电地耦接至第二探头导体27的探头终端布置29。
[0038]
在图1中的示例实施方式中,探头19被示出为以大的同轴探头的形式,其中第一探头导体25是内导体,并且第二探头导体27是同轴布置的外导体。然而,应当注意,替选地,探头19可以是包括第一探头导体25和第二探头导体27的任何其他类型的探头,例如具有平行延伸的线或杆的双线传输线探头,或者具有比图1中的大的同轴探头小的直径的外导体(和内导体)的“普通”同轴探头。此外,尽管图1中概念性地示出了探头终端布置29,但技术人员将意识到存在许多可能的方式来实现探头终端布置29。下面将参照图7a至图7d进一步描述可以适于雷达物位计系统3的各种实施方式的探头终端布置的一些代表性示例。
[0039]
在操作中,发射电磁发射信号s
t
并通过探头19将电磁发射信号s
t
朝向产品11导引并将电磁发射信号s
t
导引到产品11中。通过探头19返回电磁反射信号sr。基于反射信号以及反射信号与发射信号之间的时序关系,测量电子单元17可以确定表面15的物位。现在将参照图2中的示意性框图更详细地描述图1中的雷达物位计系统。
[0040]
参照图2中的示意性框图,图1中的雷达物位计系统3的测量电子单元17包括:收发器31、测量控制单元(mcu)33、无线通信控制单元(wcu)35、通信天线37、能量存储装置例如电池39以及罐7的外部与内部之间的馈通装置41。
[0041]
如图2中示意性示出的,mcu 33控制收发器31生成、发射和接收电磁信号。发射的信号经过馈通装置41传递至探头19的内探头导体25,并且接收的信号从探头19经过馈通装置41传递至收发器31。
[0042]
mcu 33可以确定产品11的表面15的物位,并且从mcu 33经由wcu 35通过通信天线37向诸如图1中的主机系统5的外部设备提供指示物位的值。雷达物位计系统1可以例如根据所谓的wirelesshart通信协议(iec 62591)进行配置。
[0043]
尽管测量电子单元17被示出为包括能量存储装置39并且包括用于允许无线通信的装置(例如wcu 35和通信天线37),但是应当理解,可以以不同的方式例如通过通信线(例如4ma至20ma线)来提供电力供应和通信。
[0044]
本地能量存储装置不(仅)需要包括电池,而是可以替选地或者组合地包括电容器或超级电容器。
[0045]
现在将参照图3中的示意性框图更详细地描述图1中的雷达物位计系统3。
[0046]
现在参照图3,示出了图2中的示例性收发器31的更详细的框图。
[0047]
如图3中示意性示出的,收发器31包括用于生成和发射发射信号s
t
的发射器支路以及用于接收反射信号sr并对反射信号sr进行操作的接收器支路。如图3中示出的,发射器支路和接收器支路两者均连接至定向耦合器41,以将来自发射器支路的信号引导至探头19,并且将通过探头19返回的反射信号引导至接收器支路。
[0048]
如图3中示意性示出的,收发器31包括脉冲生成电路,此处,该脉冲生成电路为第一脉冲形成电路43、第二脉冲形成电路45以及时序控制单元47的形式,该时序控制单元47用于控制由第一脉冲形成电路43输出的发射信号与由第二脉冲形成电路45输出的经频移的参考信号s
ref
之间的时序关系。
[0049]
发射器支路包括第一脉冲形成电路43,并且接收器支路包括第二脉冲形成电路45和测量电路49。
[0050]
如图3中示意性示出的,测量电路49包括:时间相关器(此处为混频器51的形式)、采样保持电路53以及放大器电路55。在本发明的实施方式中,测量电路49还可以包括积分器57。
[0051]
此外,如以上参照图2简要描述的,雷达物位计系统3包括处理电路33,该处理电路33连接至测量电路49,以确定罐7中的产品11的表面15的物位。
[0052]
当雷达物位计系统3在操作中以执行填充物位确定时,在混频器51中执行反射信号sr与由第二脉冲形成电路45输出的参考信号s
ref
之间的时间相关。参考信号s
ref
是具有以下脉冲重复频率的脉冲串:该脉冲重复频率被控制成与发射信号s
t
的脉冲重复频率相差预定的频率差δf。当测量扫描开始时,参考信号s
ref
和发射信号s
t
同相,并且然后确定指示参考信号与反射信号sr之间的时间相关的参数值以及频率差δf以形成回波信号。如以下进一步将描述的,基于对回波信号的分析,可以确定罐7中的产品11的表面15的物位。
[0053]
前面段落中简要描述的时间扩展技术对本领域的技术人员来说是公知的,并且被广泛用于脉冲雷达物位计系统中。
[0054]
从以上讨论中可以清楚地看到,混频器51的输出将是一系列值,其中每个值表示参考信号s
ref
的脉冲与反射信号sr之间的时间相关。使用采样保持电路53将该一系列值中的值连在一起,以形成连续信号。
[0055]
在本上下文中应当注意,如本领域的技术人员所公知的,采样保持电路53仅是能够在给定时间内维持电压电平的设备的说明性示例,并且存在可以提供期望功能的各种其他的装置。
[0056]
在图3的示例实施方式中,将从采样保持电路53输出的时间相关信号——相关信号sc——提供给积分器以形成测量信号sm,该测量信号sm由低噪声放大器lna 55进行放大。可以由回波信号形成电路59基于测量信号sm和频率差δf来形成上述回波信号。根据本发明的实施方式,可以由物位确定电路61确定产品11的填充物位(表面15的物位)。沿着探头19的既不靠近第一探头端部21也不靠近第二探头端部23的部段,可以使用常规方法来确定填充物位。
[0057]
根据本发明的示例实施方式,可以参照图4中的示意流程图并且进一步参照如所示的其他图、根据以下所描述的方法来确定靠近第二探头端部23的填充物位。
[0058]
在步骤401中,生成作为发射脉冲的脉冲串的发射信号s
t
,并且由收发器31发射该发射信号s
t
。
[0059]
在与步骤401同时发生的步骤402中,生成作为参考脉冲的脉冲串的参考信号s
ref
。
[0060]
在步骤403中,通过探头19将发射信号s
t
朝向罐7中的产品11导引并将发射信号s
t
导引到产品11中。
[0061]
在步骤404中,通过探头19返回由发射信号s
t
在由此遇到的阻抗转变处的反射而产生的反射信号sr并且通过收发器31接收该反射信号sr。注意,由发射信号s
t
遇到的阻抗转变包括由产品11的表面15以及第二探头端部23处的探头终端布置29提供的阻抗转变。对于上述步骤401至步骤404的进一步图示,现在参照图5a至图5b。
[0062]
图5a是示意性示出了根据本发明的示例实施方式的发射信号s
t
、反射信号sr和参考信号s
ref
的相对时序的简化时序图。
[0063]
如图5a中示意性示出的,由发射脉冲63形成的发射信号s
t
和由参考脉冲65形成的参考信号s
ref
由时序控制单元47控制以在测量扫描开始时同相。完整的测量扫描通常可以由差频δf限定,这是因为在该特定示例中,发射信号s
t
和参考信号s
ref
需要在新测量扫描开始时同相。同样如图5a中示意性示出的,这里的反射信号sr包括由发射脉冲63在产品11的表面15处的反射而产生的第一组反射脉冲67以及由发射脉冲63的由第二探头端部23处的探头终端布置29提供的阻抗转变的反射而产生的第二组反射脉冲69。第一组反射脉冲67和第二组反射脉冲69中的每一个具有与发射信号s
t
相同的脉冲重复频率,但是分别以与指示距产品的表面15和探头终端布置29的电距离的飞行时间对应的时间滞后于发射信号s
t
。
[0064]
参考信号s
ref
最初与发射信号s
t
同相,但是由于其较低的脉冲重复频率,因此参考信号s
ref
将“逃离”发射信号s
t
并且“追上”表面反射信号sr。
[0065]
当发射信号s
t
与参考信号s
ref
之间的时变相位差对应于反射信号sr的反射脉冲的飞行时间时,参考信号s
ref
的脉冲与表面反射信号sr的脉冲之间将存在时间相关。这种时间相关引起时间扩展的相关信号sc,该时间扩展的相关信号sc继而可以被转换成测量信号sm。
[0066]
在图5b的示意放大视图中提供了发射脉冲63和参考脉冲65的示例波形。
[0067]
返回至图4中的流程图,在步骤405中,由回波信号形成电路59基于反射信号以及反射信号与发射信号之间的时序关系来确定回波信号。例如,可以基于上述时间扩展的测量信号sm以及频率差δf来有利地确定回波信号。
[0068]
以上详细说明针对所谓的脉冲测量技术的情况而提供。对于雷达物位计量领域的技术人员将明显的是,替选地可以使用其中使用了经过频率调制的发射信号的其他技术来确定回波信号。
[0069]
现在将参照图6a至图6b描述针对产品11的表面15靠近探头19的第二探头端部23的示例性测量情况的回波信号的示例。
[0070]
图6a示意性示出了回波信号71,该回波信号71表现出随指示沿探头19的位置的传播参数而变化的回波信号强度(或幅度)。在这种情况下,所选择的传播参数是相对于第一探头端部21处的参考位置的、沿探头19的位置z。图6b是回波信号71的下述部分的放大视图,所述部分指示由产品11的表面15和探头19的第二探头端部23处的探头终端布置29提供的阻抗转变导致的反射。
[0071]
如图6a中示意性示出的,回波信号71指示由发射信号s
t
在第一探头端部21处的参考阻抗转变(例如,馈通装置41)处的反射而产生的参考回波73以及由来自由产品11的表面15和第二探头端部23处的探头终端布置29提供的阻抗转变处的反射的回波信号的组合形
成的复合峰75。
[0072]
如图6a至图6b中示意性示出的,复合峰75是仅表现出单个局部极值(最大值)77的宽且不对称的回波峰,使得不能基于常规的峰检测来区分产品11的表面15与第二探头端部23。如果使用常规的峰检测,则该示例中的产品物位将被认为处于下死区中。
[0073]
返回至图4中的流程图,相反使用下述的过程来确定罐7中的产品11的表面15的物位。
[0074]
在步骤406中,确定针对其的回波信号71已经达到预定的阈值信号强度th的、沿探头的第一阈值位置z
th1
。
[0075]
在步骤407中,然后基于第一阈值位置z
th1
和从第一阈值位置z
th1
朝向第二探头端部23的、沿探头19的预定偏移距离δz来确定第一界面物位。
[0076]
仅基于发射信号s
t
在产品11的表面15处的预期反射的模型和/或基于先前的测试测量来确定预定偏移距离δz。可以基于探头19的已知传播特性以及罐气氛13和罐7中的产品11的介电常数来计算表面15处的反射的回波脉冲形状。
[0077]
对于罐气氛13是空气、产品11是油并且探头19是示例性同轴探头的情况,仅来自表面15处的反射的回波脉冲79的形状可以通过一般曲线形状表达式来近似:
[0078]
f(x)=峰值幅度
·
(1-qx2),
[0079]
其中,q≈100。
[0080]
应当注意,q的值取决于雷达物位计系统3的特定配置,并且q的值可能是取决于温度的。对于示例配置,取决于温度,q值可以选自80至120的范围内的值。
[0081]
这意味着可以根据以下关系确定偏移距离δz:
[0082][0083]
然后,产品11的表面15的与参考阻抗转变(例如,馈通装置41)有关的沿探头19的位置变为:
[0084]
z1=z
th
δz
[0085]
可以基于位置z1(距参考阻抗转变的沿探头19的距离)和参考位置阻抗(例如,馈通装置41)的已知位置来确定表面15的物位。
[0086]
图7a至图7d示出了包括在图1中的雷达物位计系统中的探头终端布置29的示例配置。合适的探头终端布置29应当易于在第二探头端部23处安装至探头19,并且其应当在机械上和电气上是鲁棒的。特别地,该探头终端布置29即使经受恶劣环境和振动等也应当保持其电特性。用于显著减小下死区的有利电特性可以是:探头终端布置29提供第一探头导体25与第二探头导体27之间的高于1nh的电感。为了使探头终端布置29保持所需的机械上的鲁棒,将探头终端布置29配置为提供低于约30nh的电感可能是有益的。图7a至图7d中所示的不同示例性探头终端布置配置在安装在具有外导体27的外径为42mm的“大的同轴探头”中时提供约5nh至15nh的电感。
[0087]
图7a中所示的探头终端布置29的第一示例配置包括附接至第一探头导体25并且附接至第二探头导体27的导电构件81。在该第一示例配置中,导电构件被设置为金属套筒
的形式,该金属套筒通过以下方式导电地且机械地连接至第一探头导体25和第二探头导体27:将螺母83插入第一探头导体25中,将螺栓85穿过第二探头导体27中的孔、金属套筒以及第一探头导体25中的孔,以及将螺栓85和螺母83进行接合以挤压内导体25的外表面与外导体27的内表面之间的金属套筒。
[0088]
图7b中所示的探头终端布置29的第二示例配置包括附接至第一探头导体25并且附接至第二探头导体27的导电构件。在该第二示例配置中,导电构件81被设置为容纳第一探头导体25的金属套筒的形式。金属套筒通过固定螺钉89(在图7b中的孔内部)导电地且机械地连接至第一探头导体25,并且通过螺钉91连接至第二探头导体27。为了在制造和/或组装时允许较大的公差,导电构件81(金属套筒)的纵向延伸可以为至少10mm。
[0089]
在图7c中所示的探头终端布置29的第三示例配置中,导电构件81通过螺栓93导电地且机械地连接至第一探头导体25,并且通过铆钉95连接至第二探头导体27。
[0090]
在图7d中所示的探头终端布置29的第四示例配置中,导电构件81通过第一焊缝97导电地且机械地连接至第一探头导体25,并且通过第二焊缝99导电地且机械地连接至第二探头导体27。
[0091]
本领域技术人员认识到,本发明绝不限于上述优选实施方式。例如,其他探头配置和分层物质组成中的其他物质可能导致阈值信号强度的不同选择以及偏移距离的不同估计。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。