1.本发明涉及带电作业监测技术领域,尤其是指一种带电作业绝缘操作杆使用疲劳性评估方法及装置。
背景技术:
2.配电线路在运行中经常由于其点多、线长、面广等特点,从而容易发生各种事故,这种情况给配电网供电可靠性带来了十分严重的影响,并且还会给供电企业造成经济损失,同时也对广大城乡居民的正常生活和生产用电带来了一定的影响,这与当前各供电企业大力提升优质服务水平以及用户对供电可靠性的高要求背道而驰。而带电作业是电网设备检测、检修维护和改造的重要手段,在我国已有近70年的历史,是电力系统安全、可靠、稳定运行的重要技术保障。配网带电作业是一种高强度的上肢重复劳动,需要作业人员长时间使用工器具进行作业,这会导致作业人员的肌肉一直处于疲劳状态,肌肉疲劳累积后可能会导致一系列肌肉损伤问题,诱发工作相关肌肉骨骼疾患,因此需要及时获取作业人员的肌肉疲惫状态,从而及时降低肌肉疲劳积累致病的风险。
3.而肌肉疲劳研究是人机工程学领域中应用非常广泛的研究方法。目前主流的研究方法有主观评价法、生物力学分析法、生化指标分析法及生理信号分析法等。生理信号分析法中目前采用较多的是表面肌电信号(semg)法,其采集方式方便无创,可检测到与神经肌肉活动相关的生物电信号,包含了神经肌肉系统丰富的生理信息,反映神经肌肉系统的生理状态及活动情况。但是在表面肌电信号法的应用过程中,并未对采集对象进行有效选择,在作业过程中,由于作业内容的变化也会有不同重点使用的肌肉,但现有技术中往往对于检测对象,如上肢肌肉进行整体检测,检测效率和判断效率并不高。
技术实现要素:
4.本发明的目的是克服现有技术中的缺点,提供一种带电作业绝缘操作杆使用疲劳性评估方法及装置。
5.本发明的目的是通过下述技术方案予以实现:
6.一种带电作业绝缘操作杆使用疲劳性评估方法,包括以下步骤:
7.步骤一,设置工况条件、绝缘操作杆种类和握距情况,对每个工况条件下,每种绝缘操作杆对应的每种握距情况进行预试验,根据预试验结果确定最优目标肌肉;
8.步骤二,采集每个工况条件下,每种绝缘操作杆的每种握距情下最优目标肌肉的生物电信号,对采集的生物电信号进行特征值提取,并对提取的特征值进行特征参数选择;
9.步骤三,建立疲劳性评估模型,划分肌肉状态,并划分的肌肉状态对选择的特征参数进行标签化处理,根据标签化处理后的特征参数建立训练集,通过训练集对疲劳性评估模型进行训练;
10.步骤四,采集作业人员使用带电作业绝缘操作杆过程中的生物电信号,并将采集的生物电信号输入训练好的疲劳性评估模型,获取作业人员的上肢肌肉疲劳状态。
11.进一步的,步骤二中对降噪处理后的生物电信号提取的特征值包括时域特征参数和频域特征参数,所述时域特征参数包括积分肌电值iemg和均方根值rms,所述频域特征参数包括平均功率频率mpf和中值频率mdf。
12.进一步的,步骤三中所述肌肉状态包括放松态、负重态、疲劳过渡态、深度疲劳态和疲劳态。
13.进一步的,步骤一中根据预试验结果确定最优目标肌肉的具体过程为:设置实验环境,并在预试验对应信号采集对象的右侧放置一块可移动的白板,白板上设置有一个圆,调整白板和信号采集对象的距离,信号采集对象手持绝缘操作杆,并将绝缘操作杆的最前端从白板上设置的圆的最顶端开始循圆周逆时针转动,并持续一定时间,实时采集转动过程中信号采集对象上肢每块肌肉对应的肌电信号,根据每块肌肉对应的肌电信号变化确定使用绝缘操作杆对每块肌肉疲劳程度的影响,选取影响最大的一块肌肉作为最优目标肌肉。
14.进一步的,步骤二中通过高速摄像机和表面肌电信号法获取生物电信号,通过表面肌电信号法实时采集semg信号,同时通过摄像头采集测试过程中的视频数据,并对采集的视频数据进行作业人员肌肉运动状态识别,并将作业人员肌肉的运动状态与采集到的semg信号进行匹配对应,获取生物电信号。
15.进一步的,在采集到semg信号后,还对采集的semg信号进行滤波处理。
16.一种带电作业绝缘操作杆使用疲劳性评估装置,包括数据采集模块、数据分析模块和展示模块,所述数据采集模块与数据分析模块连接,所述数据采集模块用于采集作业人员在使用绝缘操作杆过程中的生物电信号,所述数据分析模块用于根据采集到的生物电信号进行肌肉疲劳判断,所述展示模块与数据分析模块连接,所述展示模块用于展示肌肉疲劳评估结果。
17.进一步的,所述数据采集模块包括高速摄像机和电生理数据采集仪。
18.本发明的有益效果是:
19.表面肌电信号法可以检测到神经肌肉活动相关的生物电信号,生物电信号中包含了神经肌肉系统丰富的生理信息,能够反应神经系统的生理状态及活动情况。且能够做到无创检测,能够更容易被作业人员接受。肌肉的运动状态与表面肌电信号的变化情况具有很好的一致性,通过semg信号能够客观且定量地反映配网带电作业工器具使用对于作业人员肌肉疲劳程度的影响。同时在采集semg信号的同时,采用高速摄像头对使用过程进行测量,从而获取肌肉的运动状态,并能够将肌肉的运动状态与semg信号的变化进行匹配对应,基于肌肉的运动状态和semg信号获取的生物电信号能够更加全面,后续得到的肌肉疲劳评估结果也更加准确。且通过预试验对最优目标肌肉进行选择,后续采集生物电信号时,能够将采集目标设置为最优目标肌肉,能够有效提高检测准确性和检测效率。
附图说明
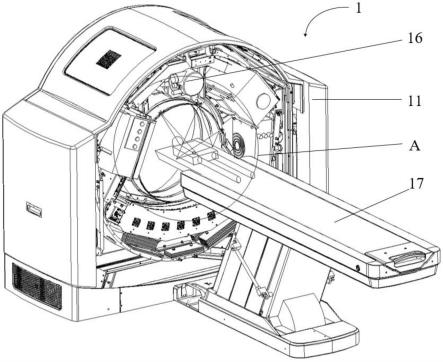
20.图1是本发明的一种结构示意图;
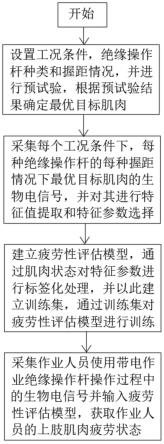
21.图2是本发明的一种流程示意图;
22.其中:1、数据采集模块,2、数据分析模块,3、展示模块。
具体实施方式
23.下面结合附图和实施例对本发明进一步描述。
24.实施例:
25.一种带电作业绝缘操作杆使用疲劳性评估装置,如图1所示,包括数据采集模块、数据分析模块和展示模块,所述数据采集模块与数据分析模块连接,所述数据采集模块用于采集带电作业人员在使用绝缘操作杆过程中的生物电信号,所述数据分析模块用于根据采集到的生物电信号进行肌肉疲劳判断,所述展示模块与数据分析模块连接,所述展示模块用于展示肌肉疲劳评价结果。
26.所述数据采集模块包括高速摄像机和电生理数据采集仪。
27.本实施例中采用了美国iworx公司所生产的ix-bio8八通道电生理数据采集仪,能够从同一运动或休息的实验对象同时采集8通道表面肌电图,能够得到最直观可靠的实验结果。
28.所述数据分析模块具体采用labscribe软件对的ix-bio8八通道电生理数据采集仪所采集到的数据进行分析计算。其分析计算结果直接在电脑终端上进行展示。
29.一种带电作业绝缘操作杆使用疲劳性评估方法,如图2所示,包括以下步骤:
30.步骤一,设置工况条件、绝缘操作杆种类和握距情况,对每个工况条件下,每种绝缘操作杆对应的每种握距情况进行预试验,根据预试验结果确定最优目标肌肉;
31.步骤二,采集每个工况条件下,每种绝缘操作杆的每种握距情下最优目标肌肉的生物电信号,对采集的生物电信号进行特征值提取,并对提取的特征值进行特征参数选择;
32.步骤三,建立疲劳性评估模型,划分肌肉状态,并划分的肌肉状态对选择的特征参数进行标签化处理,根据标签化处理后的特征参数建立训练集,通过训练集对疲劳性评估模型进行训练;
33.步骤四,采集作业人员使用带电作业绝缘操作杆过程中的生物电信号,并将采集的生物电信号输入训练好的疲劳性评估模型,获取作业人员的上肢肌肉疲劳状态。
34.所述疲劳性评估模型具体通过支持向量机(svm)算法进行训练学习。
35.在采集每个工况条件下每种绝缘操作杆的每种握距情下最优目标肌肉的生物电信号时,设置若干名信号采集对象,能够有效排除其随机性。
36.步骤二中对降噪处理后的生物电信号提取的特征值包括时域特征参数和频域特征参数,所述时域特征参数包括积分肌电值iemg和均方根值rms,所述频域特征参数包括平均功率频率mpf和中值频率mdf。
37.步骤三中所述肌肉状态包括放松态、负重态、疲劳过渡态、深度疲劳态和疲劳态。
38.步骤一中根据预试验结果确定最优目标肌肉的具体过程为:设置实验环境,并在预试验对应信号采集对象的右侧放置一块可移动的白板,白板上设置有一个圆,调整白板和信号采集对象的距离,信号采集对象手持绝缘操作杆,并将绝缘操作杆的最前端从白板上设置的圆的最顶端开始循圆周逆时针转动,并持续一定时间,实时采集转动过程中信号采集对象上肢每块肌肉对应的肌电信号,根据每块肌肉对应的肌电信号变化确定使用绝缘操作杆对每块肌肉疲劳程度的影响,选取影响最大的一块肌肉作为最优目标肌肉。
39.将绝缘操作杆的最前端从白板上设置的圆的最顶端开始循圆周逆时针转动的过程为模拟绝缘操作杆作业过程中的拧螺丝动作。且本实施例中,设置每个信号采集对象的
持续转动时间为6秒,并在一次信号采集过后,信号采集对象休息10分钟后,再进行下一次信号采集,一共进行3次信号采集。
40.在预试验前,还需要对实验环境以及信号采集对象进行预处理,信号采集对象在实验前先做热身运动及伸展操15分钟,避免直接开始实验对被试的关节肌肉产生伤害。然后用5%浓度酒精清洁皮肤,刮除毛发后用细砂纸打磨皮肤,并注意避免皮肤的破损处或瘢痕位置,最后用清水清洗皮肤,粘贴好电极贴片,电极贴片的粘贴设置具体为:电极间距2cm,参考电极置于两电极中心线距离两电极5cm处。将电极头扣在表面电极片上,理顺电极的导联线,用弹性绷带固定好线圈及导联线,以防止电极片接触不良以及导联线移动带来的信号干扰。最后信号采集对象进入预试验实验区域,开展预试验。
41.步骤二中通过高速摄像机和表面肌电信号法获取生物电信号,通过表面肌电信号法实时采集semg信号,同时通过摄像头采集测试过程中的视频数据,并对采集的视频数据进行作业人员肌肉运动状态识别,并将作业人员肌肉运动状态与采集到的semg信号进行对应,获取生物电信号。
42.在采集到semg信号后,还对采集的semg信号进行滤波处理。
43.semg信号的幅值一般在0~5mv,频率主要集中在20~150hz,是一种较为微弱的生物电信号,所以在semg信号的采集过程中容易受到多种噪音干扰,如移动伪迹噪音、环境噪音、仪器电子元件固有噪音等,因此采用带通滤波器能够有效实现降噪目的。
44.以上所述的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。