低张力pe膜主动放卷缓冲控制装置
技术领域
1.本实用新型涉及复合材料预浸布生产设备领域,详细地讲是一种低张力pe膜主动放卷缓冲控制装置。
背景技术:
2.众所周知,复合材料预浸布是复合材料制备的关键中间产品,而复合材料预浸布的成品结构为三层夹心结构,从下到上为离型纸\pe膜、预浸布、pe膜,因此在复合材料预浸布的制备过程中必须贴附pe膜。
3.复合材料中pe膜多为7μm-12μm厚的一层薄膜,因其厚度超薄且pe材质柔软极易在受力情况下发生形变。因此在复合材料的的制备过程中pe膜的放卷需要在较小的放卷张力才可以保证预浸布的产品质量。
4.在目前的生产过程中pe膜的放卷主要为被动放卷,目前因pe膜整卷米数较少重量较轻,被动放卷在低阻力或无附加阻力情况下可以满足放卷张力大于pe膜自重所产生的阻力,满足放卷张力要求。
5.在复合材料生产速度不断提速,预浸料产品质量要求不断的提升要求下,原有小直径的pe膜因需要经常更换,且更小放卷张力要求下,低张力主动放卷已经成为未来的发展需求。
技术实现要素:
6.为了克服现有技术的不足,本实用新型提供一种低张力pe膜主动放卷缓冲控制装置,在加大pe膜卷最大重量情况下实现更小张力的放卷,实现大卷径小放卷张力的目的。
7.本实用新型解决其技术问题所采用的技术方案是:一种低张力pe膜主动放卷缓冲控制装置,设有机架,其特征是,伺服电机与气涨轴固定在机架上,伺服电机输出轴与气涨轴相互固定,气涨轴一侧的机架上方及下方分别安装有一个导向辊,两个导向辊之间安装有张力辊,张力辊上设有张力传感器,浮动辊安装在摆臂一端端部,摆臂另一端经摆臂回转轴安装在机架上,浮动低摩擦气缸一端与摆臂铰接固定,浮动低摩擦气缸另一端铰接固定在机架上,浮动低摩擦气缸缸体上安装有位移传感器的主体,浮动低摩擦气缸的驱动杆上安装有位移传感器的检测端。
8.本实用新型的有益效果是,在加大pe膜卷最大重量情况下实现更小张力的放卷,实现大卷径小放卷张力的目的,增强了张力调节稳定性,满足放卷张力要求。
附图说明
9.下面结合附图和实施例对本实用新型进一步说明。
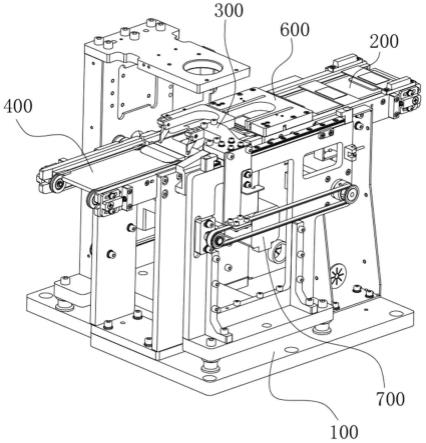
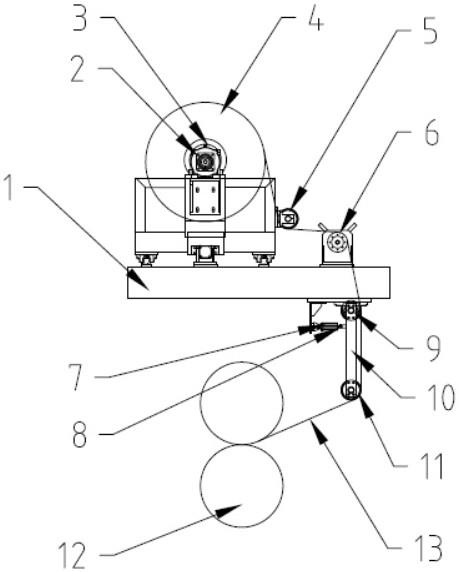
10.图1本实用新型的结构示意图。
11.图中1.机架,2.伺服电机,3.气涨轴,4.pe膜卷,5.导向辊,6.张力辊,7.浮动低摩擦气缸,8.位移传感器,9.摆臂回转轴,10.摆臂,11.浮动辊,12.覆膜辊,13.pe膜。
具体实施方式
12.在图中,本实用新型伺服电机2与气涨轴3固定在机架1上,伺服电机2输出轴与气涨轴3相互固定,伺服电机2驱动气涨轴3转动,气涨轴3一侧的机架1上方及下方分别安装有一个导向辊5,两个导向辊之间安装有张力辊6,张力辊6上设有张力传感器;气涨轴3上安装有pe膜卷4,pe膜卷4放出pe膜13在导向辊5的导向下绕过张力辊6进入下方导向辊,pe膜13在经过下方导向辊后绕过浮动辊11进入覆膜辊12对产品进行覆膜。
13.浮动辊11安装在摆臂10一端端部,摆臂10另一端安装有摆臂回转轴9,此时浮动辊11轴心到摆臂回转轴的距离为l,摆臂回转轴9安装在机架1上并使摆臂10与浮动辊11绕其轴心摆动;浮动低摩擦气缸7一端(气缸驱动杆)与摆臂10铰接固定,铰接点距离摆臂回转轴轴心距离为l/n;浮动低摩擦气缸7另一端(气缸缸体)铰接固定在机架1上。浮动低摩擦气缸7缸体上安装有位移传感器8(主体),浮动低摩擦气缸7驱动杆上安装有位移传感器8(检测端)并随驱动杆的移动同步移动,实时反馈驱动杆的移动距离。浮动低摩擦气缸7气压采用电控减压阀控制调节。浮动辊11可左右摆动,浮动辊11摆动位置可通过位移传感器8实时反馈。
14.本实用新型的具体实施方法是:
15.预先按照上文所述将pe膜13预先穿过各导辊完成准备工作,启动主动放卷控制系统,并设定放卷张力值、运行速度,以及pe膜卷4的初始卷径。启动主机(覆膜辊12)开始进行生产工作,pe膜13在覆膜辊12的牵引下以设定运行速度进行放卷,同时pe膜卷4在伺服电机2驱动下开始转动,此时pe膜卷4的放卷速度(pe膜卷4表面线速度)小于设定运行速度。此过程运行路径上松弛的pe膜13被逐渐拉紧直至张力辊6其上的张力传感器检测到张力值。
16.当张力传感器检测到张力值时主动放卷闭环控制系统开始运行,此时张力辊6检测张力值小于设定张力值且浮动辊11位置处于松状态,此时控制系统基于张力辊6(张力传感器)检测张力值进行计算,并开始对伺服电机2速度调节(放卷速度小于运行速度),张力辊6(张力传感器)检测张力值开始上升,浮动辊11向松状态前进。在以上张力值调整过程中,控制系统会根据浮动辊11位置变化对控制系统的计算系数(标准p计算系数1)进行调整。
17.当浮动辊11位置处于松状态时,此时控制系统的计算系数为1xn(n>1,n值可调整),此时控制系统对伺服电机2调节速度快,张力辊6(张力传感器)检测张力值变化快,pe膜13张力值快速向设定张力值调整。
18.当张力辊6(张力传感器)检测张力值上升时,此时浮动辊11位置向松状态变化,此时n值在向1/n值变化,此时控制系统的计算系数向1x1/n变化(n>1,n值可调整),此时控制系统对伺服电机2调节速度减缓,张力辊6(张力传感器)检测张力值变化减慢,直至张力辊6(张力传感器)检测张力值当到达设定张力值,此时浮动辊11位置处于过渡区中间(不同张力设定值,浮动气缸设定气压自动调整)。
19.当控制系统检测到张力辊6检测张力值到达设定值与浮动辊11处于过渡区两者同时满足时,此时控制系统能计算系数为1x0(即0),此时伺服电机2放卷速度与设定速度相同且张力辊6(张力传感器)检测张力值不参与伺服电机2运行速度调节。
20.当运行一段时间后pe膜卷4表面卷径减小,放卷速度减慢,此时张力辊6(张力传感器)检测张力值加大且浮动辊11位置进入紧区间,此时控制系统开始接入控制伺服电机2放
卷速度,当浮动辊11处于紧区间时控制系统的计算系数为1x1/n(n>1,n值可调整);当浮动辊11向紧区间变化时,控制系统的计算系数向1xn变化。通过调整伺服电机2放卷速度加速比例调整进而快速调整pe膜卷4放卷张力;当控制系统检测到张力辊6(张力传感器)检测张力值到达设定值与浮动辊11处于过渡区两者同时满足时,此时控制系统能计算系数再次调整为1x0(即0),此时伺服电机2放卷速度与设定速度相同且张力辊6(张力传感器)检测张力值不参与伺服电机2运行速度调节。
21.当设备正常运行过程中,因pe膜卷4外径椭圆或其他因素产生的表面线速度波动,此时张力辊6(张力传感器)检测张力值发生微小变化,但因浮动辊11位置处于过渡区此时控制系统不接入调整,有浮动辊11浮动进行缓冲调节,直至因波动较大浮动辊11浮动调节超出过渡区调节范围时控制系统接入调节。
22.本实用新型的目的为减少控制系统因微小且无规律的张力波动所产生的频繁张力调节,采用浮动张力缓冲方法减少张力调节频率,并加大调节效率,防止张力值正反波动频繁且波动较大稳定困难。此种调整方法中间设有缓冲过度区,且设有浮动辊11缓冲张力波动,极大的增强了张力调节稳定性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。