1.本实用新型涉及注浆机械技术领域,具体地,涉及一种快速定位覆盖多车道的注浆机械手臂。
背景技术:
2.近年来,随着经济的发展,道路交通量剧增,汽车轴载日益重型化,沥青高速路面裂缝通病随之出现。以往道路维修方式为开挖式,成本高、周期长、工程量大。随着技术的发展,近年来研发出了裂缝非开挖注浆修复技术,该项技术在近两年开始应用。然而,现有的注浆设备过于简陋,注浆软管直接连接注浆枪,管路覆盖范围较小,若增长管路则会引起管路收放繁琐,易弯折影响注浆效率、注浆位置移动困难等问题。
3.为此,本实用新型提供一种快速定位覆盖多车道的注浆机械手臂,解决传统注浆设备注浆管路过短、覆盖范围小、易弯折影响注浆效率、收放繁琐等问题,以配合道路维修特种车注浆系统使用,实现快速定位,并能覆盖多车道。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型的目的是提供一种快速定位覆盖多车道的注浆机械手臂。
5.本实用新型提供的快速定位覆盖多车道的注浆机械手臂,包括支架、移动机构、旋转机构、升降机构、悬臂、控制手把,所述支架上设有滑轨,所述移动机构与所述滑轨可滑动地连接,所述悬臂与所述滑轨平行,所述移动机构与所述旋转机构、所述旋转机构与所述升降机构通过所述悬臂连接,所述升降机构与所述滑轨垂直,所述控制手把与所述升降机构连接,所述控制手把上设置有枪体挂钩。
6.进一步地,所述升降机构包括导杆、底板和依次设置在所述底板上的下直线轴承、气缸气锁、上直线轴承,所述导杆穿过所述下直线轴承、所述气缸气锁、所述上直线轴承,所述底板与所述悬臂连接,所述导杆靠近所述下直线轴承的一端与所述控制手把连接。
7.进一步地,所述导杆靠近所述上直线轴承的一端还设置有助力平衡弹簧和止挡环。
8.进一步地,所述气缸气锁通过气管连接有第一电磁阀。
9.进一步地,所述旋转机构包括下固定支架、固定轴、后悬臂固定支架、下深沟球轴承、圆柱滚子轴承、上深沟球轴承、旋转阻尼器、前悬臂固定支架、刹车片、气动刹车钳、上拉板,所述前悬臂固定支架通过所述固定轴分别与所述下固定支架和所述上拉板连接,所述后悬臂固定支架分别与所述下固定支架和所述上拉板连接,所述固定轴为阶梯轴,所述固定轴还与所述下固定支架连接,所述固定轴上设有所述下深沟球轴承、所述圆柱滚子轴承、所述上深沟球轴承、所述旋转阻尼器,所述刹车片与所述前悬臂固定支架连接,所述气动刹车钳与所述下固定支架连接。
10.进一步地,所述气动刹车钳通过气管连接有第二电磁阀。
11.优选地,所述固定轴与所述下固定支架、所述刹车片与所述前悬臂固定支架、所述气动刹车钳与所述下固定支架、所述后悬臂固定支架与所述下固定支架和所述上拉板之间均为螺栓连接。
12.进一步地,所述移动机构包括滑块、滑移底板、钳制器,所述滑块设在所述滑轨上,所述滑移底板与所述滑块连接,所述钳制器设在所述滑移底板上,所述钳制器被配置为移动和锁紧所述滑块。
13.进一步地,所述钳制器通过气管与第三电磁阀连接。
14.进一步地,所述滑轨远离所述升降机构的端部设有止挡块。
15.与现有技术相比,本实用新型具有如下的有益效果:
16.本实用新型提供的快速定位覆盖多车道的注浆机械手臂,通过移动机构、旋转机构和升降机构实现了注浆枪在三个方向上的位置调整,通过机械手臂能快速移动整体机械手臂的位置,实现对多车道的覆盖;在对机械手臂定位后能够对机构进行锁紧,确保注浆过程的稳定进行。
附图说明
17.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
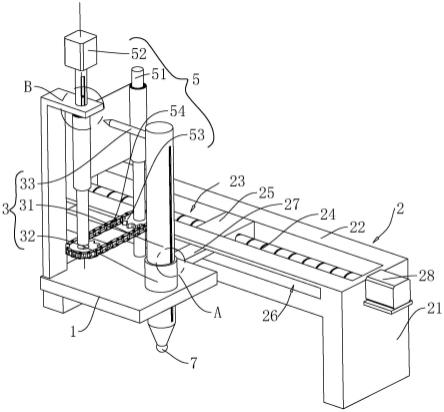
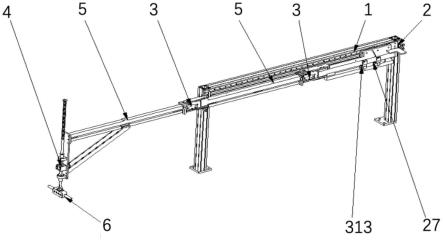
18.图1为本实用新型实施例的注浆机械手臂的整体结构示意图;
19.图2为本实用新型实施例的升降机构与控制手把结构示意图;
20.图3为本实用新型实施例的旋转机构结构示意图;
21.图4为本实用新型实施例的移动机构结构示意图。
22.图中:
23.1-支架;
24.2-移动机构;
25.21-滑移固定支架;22-滑轨;23-滑块;24-滑移底板;25-钳制器;26-止挡块;27-第三电磁阀;
26.3-旋转机构;
27.31-下固定支架;32-固定轴;33-后悬臂固定支架;34-下深沟球轴承;35-圆柱滚子轴承;36-上深沟球轴承;37-旋转阻尼器;38-前悬臂固定支架;39-刹车片;310-气动刹车钳;311-气管接头;312-固定螺栓;313-第二电磁阀;314-上拉板;
28.4-升降机构;
29.41-底板;42-下直线轴承;43-气缸气锁;44-上直线轴承;45-导杆;46-助力平衡弹簧;47-止挡环;
30.5-悬臂;
31.6-控制手把;
32.61-枪体挂钩;62-控制按钮;63-移动把手。
具体实施方式
33.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的
技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
34.本实用新型提供了一种快速定位覆盖多车道的注浆机械手臂,如图1所示,本实用新型的快速定位覆盖多车道的注浆机械手臂包括支架1、移动机构2、旋转机构3、升降机构4、悬臂5和控制手把6。支架1用于为注浆机械手臂提供支撑,移动机构2、旋转机构3、升降机构4用于实现注浆枪的各向移动。
35.如图1所示,支架1为门型结构,包括两侧的立柱和立柱之间的横梁,支架1可以通过立柱底部的安装板固定在注浆特种车上等位置。如图4所示,在立柱1的横梁上设置有滑轨固定支架21,滑轨固定支架21用于安装滑轨22,滑轨22上安装移动机构2,移动机构2能够在滑轨22上滑动。
36.如图1所示,移动机构2、旋转机构3、升降机构4之间通过悬臂5连接,悬臂5与支架1的横梁平行,升降机构4的移动方向与悬臂5相垂直。升降机构4的一端连接有控制手把6。如图2所示,控制手把6远离升降机构4的一侧设置有枪体挂钩61。枪体挂钩61用于挂接注浆枪。
37.本实用新型中,旋转机构3的数量不限于1个,可以为2个,也可以根据需要设置其它数量的旋转机构3。根据旋转机构3的数量,相应地设置悬臂5的数量。
38.如图2所示,升降机构4包括底板41,在底板41上依次设置有下直线轴承42、气缸气锁43、上直线轴承44,导杆45穿过下直线轴承42、气缸气锁43、上直线轴承44,由气缸气锁43驱动导杆45移动。导杆45远离下直线轴承42的一端套设有助力平衡弹簧46,导杆45的端部设置有止挡环47,助力平衡弹簧46减缓导杆45移动时的冲击,止挡环47防止导杆45超行程下降。
39.气缸气锁43通过气管连接有第一电磁阀(图上未示出),通过第一电磁阀控制向气缸气锁43的供气,实现对气缸气锁43运行的控制。
40.本实施例中,下直线轴承42、气缸气锁43、上直线轴承44通过螺栓固定在底板41上。底板41与悬臂5的端部连接,连接的方式可以为螺栓连接,也可以为焊接。如图1所示,为了增加连接的稳定性和强度,底板41与悬臂5之间还设置有斜撑。
41.如图3所示,旋转机构3包括下固定支架31、后悬臂固定支架33、下深沟球轴承34、圆柱滚子轴承35、上深沟球轴承36、旋转阻尼器37、前悬臂固定支架38、刹车片39、气动刹车钳310、上拉板314,前悬臂固定支架38通过固定轴32分别与下固定支架31和上拉板314相连,后悬臂固定支架33通过螺栓分别与下固定支架31和上拉板314连接,固定轴32还与下固定支架31通过固定螺栓312连接。固定轴32为阶梯轴,固定轴32上安装有下深沟球轴承34、圆柱滚子轴承35、上深沟球轴承36、旋转阻尼器37,以实现旋转机构3两端的悬臂5的旋转。刹车片39通过螺栓与前悬臂固定支架38连接,气动刹车钳310通过螺栓与下固定支架31连接。气动刹车钳310上设有气管接头311,气管接头311通过气管连接至第二电磁阀313,如图1所示,通过电磁阀313控制向气动刹车钳310的供气,进而对旋转机构3两端的悬臂5的旋转和锁紧进行控制。
42.本实施例中,旋转机构3的两端通过焊接的方式与悬臂5连接。
43.如图4所示,滑移固定支架21通过螺栓与支架1的横梁连接,滑轨22通过螺栓与滑
移固定支架21连接。移动机构2包括滑块23、滑移底板24、钳制器25,滑块23的端面为“c”型结构,滑块23以卡合的方式安装在滑轨22上,滑移底板24通过螺栓与滑块23连接,钳制器25通过螺栓与滑移底板24连接。钳制器25通过气管连接至第三电磁阀27,如图1所示,第三电磁阀27用于控制向钳制器25的供气,实现滑块23的移动与锁紧控制。如图4所示,在滑轨22的端部设置有止挡块26,防止滑块23超行程滑动。止挡块26与滑轨22通过螺栓连接。
44.如图2所示,控制手把6上设置有控制按钮62,控制按钮62的数量为四个,通过控制按钮62分别实现对第一电磁阀、第二电磁阀313、第三电磁阀27以及注浆枪的控制。控制手把6上还设置有移动把手63,通过移动把手63实现对控制手把6的手动操作。
45.悬臂5为普通的杆状构件,可以采用型钢或者钢板等拼接而成,其端部与滑移底板24、或者旋转机构3、或者底板41进行连接。连接不同机构的悬臂5,其长度可以相同,也可以不相同。
46.枪体挂钩61用于挂载注浆枪,注浆管可以沿着悬臂5进行敷设,当注浆枪的位置移动时,注浆管可随之进行调整。
47.本实用新型的快速定位覆盖多车道的注浆机械手臂的使用过程如下:按下控制手把6上的三个用于电磁阀控制的控制按钮62,第一电磁阀、第二电磁阀313、第三电磁阀27通电,给升降机构4中的气缸气锁43、移动机构2的钳制器25供气,并将旋转机构3的气动刹车钳310气路切断,此时控制手把6在导杆45的带动下升降,悬臂5在滑块23的带动下前后自由移动,也可以进行相对旋转;当定位到注浆孔上方时,再次按下控制电磁阀的三个控制按钮62,第一电磁阀、第二电磁阀313、第三电磁阀27断电,升降机构4的气缸气锁43、移动机构2的钳制器25供气管路断开,旋转机构3的气动刹车钳310供气,此时,升降机构4、移动机构2和旋转机构3均被锁紧,机械手臂位置固定,即可进行注浆工作;再通过控制手把上控制注浆枪的控制按钮62,开启注浆枪进行注浆;注浆完成时,再通过控制按钮62关闭注浆枪,完成一次注浆工作。
48.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。