1.本实用新型涉及机器人技术领域,特别是涉及一种安防巡逻机器人。
背景技术:
2.当今社会存在着人口老龄化加重、劳动力成本飙升、安保人员流失率高等诸多问题,传统的“人防 物防”体系很难满足现在的安防需求。随着国民安全意识的不断提高,人们对自身安全防护意识越来越强,而且传统安防体系弊端显著,安防人员招聘困难,培训成本高等问题使该产业已经遇到发展瓶颈。
3.正因为这些问题的出现,催生了安防机器人产业新的发展契机,在政府的大力支持下,安防机器人收到了强烈的关注,虽然目前该产业还处于起步阶段,但在巨大的安防市场需求下,其发展潜力和未来前景广阔;现有安防机器人的灵活性差,使用不方便且成本高。
技术实现要素:
4.本实用新型的目的是提供一种安防巡逻机器人,以解决上述现有技术存在的问题,提高安防巡逻机器人的灵活性。
5.为实现上述目的,本实用新型提供了如下方案:
6.本实用新型提供了一种安防巡逻机器人,包括底盘、支撑板和三个电动伸缩杆,每个所述电动伸缩杆都一端通过球铰与所述底盘的顶面连接、另一端通过球铰与所述支撑板的底面连接,且三个所述电动伸缩杆与所述底盘的连接点呈三角形分布,三个所述电动伸缩杆与所述支撑板的连接点呈三角形分布;所述底盘的底部设置有四个行走轮和用于驱动所述行走轮转动的驱动单元;所述底盘的底部还固设有电源;所述支撑板上固设有控制单元、无线通信模块、摄像头和探照灯,所述无线通信模块、所述摄像头、所述探照灯及每个所述电动伸缩杆均与所述控制单元电连接,所述电源为所述驱动单元、所述摄像头、所述控制单元、所述探照灯及所述无线通信模块供电。
7.优选的,所述驱动单元为四个,所述驱动单元与所述行走轮一一对应,所述行走轮为麦克纳姆轮,所述驱动单元包括伺服电机和传动轴,所述伺服电机的输出轴通过所述传动轴与对应的所述行走轮传动连接。
8.优选的,所述控制单元包括微型电脑和单片机,所述单片机、所述摄像头和所述无线通信模块分别与所述微型电脑通信连接,所述探照灯和所述电动伸缩杆分别与所述单片机电连接。
9.优选的,所述摄像头与所述支撑板固连,所述探照灯与所述摄像头固连;所述支撑板上还设置有防护罩,所述微型电脑、所述单片机、所述摄像头、所述探照灯和所述无线通信模块均设置在所述防护罩内,且所述摄像头的镜头端和所述探照灯的照射端伸出所述防护罩;所述防护罩上设置有与所述微型电脑电连接的启闭按钮。
10.优选的,所述防护罩上设置有分别与所述微型电脑通信连接的激光发射器、激光
接收器、温湿度传感器、烟雾传感器、红外传感器。
11.优选的,所述防护罩上还设置有分别与所述微型电脑通信连接的麦克风和扬声器,所述微型电脑通信连接有音频解码器。
12.优选的,所述防护罩上还设置有与所述微型电脑通信连接的显示屏。
13.本实用新型相对于现有技术取得了以下技术效果:
14.本实用新型的安防巡逻机器人的灵活性高,使用方便。本实用新型的安防巡逻机器人通过控制三个电动伸缩杆进行伸缩能够对支撑板的角度和高度进行调节,从而调节摄像头和显示屏及各种传感器的角度和高度,方便了摄像头从不同的角度进行拍摄,且支撑板的高度可调,能够方便不同身高的人与该安防巡逻机器人进行互动。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1为本实用新型安防巡逻机器人的结构示意图;
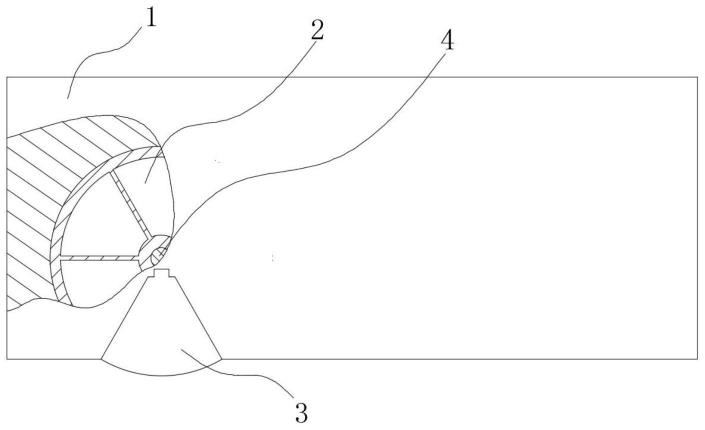
17.图2为本实用新型安防巡逻机器人的部分结构示意图;
18.其中:1、底盘;2、支撑板;3、电动伸缩杆;4、行走轮;5、电源;6、摄像头;7、探照灯;8、激光发射器;9、激光接收器;10、红外传感器;11、烟雾传感器;12、温湿度传感器;13、启闭按钮;14、麦克风;15、防护罩;16、扬声器;17、显示屏;18、微型电脑;19、单片机;20、无线通信模块。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.本实用新型的目的是提供一种安防巡逻机器人,以解决上述现有技术存在的问题,提高安防巡逻机器人的灵活性。
21.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
22.如图1至图2所示:本实施例提供了一种安防巡逻机器人,包括底盘1、支撑板2和三个电动伸缩杆3,每个电动伸缩杆3都一端通过球铰与底盘1的顶面连接、另一端通过球铰与支撑板2的底面连接,且三个电动伸缩杆3与底盘1的连接点呈三角形分布,三个电动伸缩杆3与支撑板2的连接点呈三角形分布。
23.底盘1的底部设置有四个行走轮4和用于驱动行走轮4转动的驱动单元;底盘1的底部还固设有电源5;驱动单元为四个,驱动单元与行走轮4一一对应,行走轮4为麦克纳姆轮,驱动单元包括伺服电机和传动轴,伺服电机的输出轴通过传动轴与对应的行走轮4传动连接。采用麦克纳姆轮作为行走轮4能够增强本实施例安防巡逻机器人能够向水平方向的
360
°
任意方向进行移动,无疑增强了本实施例安防巡逻机器人的灵活性。
24.支撑板2上固设有控制单元、无线通信模块20、摄像头6和探照灯7,电源5为驱动单元、摄像头6、控制单元、探照灯7及无线通信模块20供电。
25.在本实施例中,控制单元包括微型电脑18和单片机19,单片机19、摄像头6和无线通信模块20分别与微型电脑18通信连接,探照灯7和电动伸缩杆3分别与单片机19电连接。
26.摄像头6与支撑板2固连,探照灯7与摄像头6固连;支撑板2上还设置有防护罩15,微型电脑18、单片机19、摄像头6、探照灯7和无线通信模块20均设置在防护罩15内,且摄像头6的镜头端和探照灯7的照射端伸出防护罩15;防护罩15上设置有与微型电脑18电连接的启闭按钮13,通过启闭按钮13来控制微型电脑18的启闭,即控制本实施例安防巡逻机器人的启闭。微型电脑18能够将摄像头6拍摄的画面通过无线通信模块20传送至控制终端,方便控制终端的工作人员远程观察画面。
27.防护罩15上设置有分别与微型电脑18通信连接的激光发射器8、激光接收器9、温湿度传感器12、烟雾传感器11、红外传感器10,激光发射器8和激光接收器9构成激光雷达,微型电脑18通过分析激光发射器8和激光接收器9的数据能够实现激光测距;通过红外传感器10能够检测安防巡逻机器人所处周围环境的特征,比如通过感知周围环境的热量来辅助判断周围环境中是否有人或其它动物等。通过烟雾传感器11能够获得安防巡逻机器人所处周围环境的烟雾浓度信息,在烟雾浓度超标时微型电脑18可以通过无线通信模块20向控制终端发出报警信号,从而达到防止火灾的目的。
28.防护罩15上还设置有分别与微型电脑18通信连接的麦克风14和扬声器16,微型电脑18通信连接有音频解码器。人员可以通过麦克风14和扬声器16与安防巡逻机器人进行语音互动,需要说明的是在微型电脑18中内置有语音处理软件,能够进行语言处理、语音分析和语音合成等功能,需要说明的是智能语音对话,为现有成熟技术,在此不对其进行赘述。
29.防护罩15上还设置有与微型电脑18通信连接的显示屏17,显示屏17用于显示安防巡逻机器人所检测到的各种数据,包括周围环境的温度、湿度、烟雾浓度等数据。在本实施例中,微型电脑18采用树莓派4b,单片机19的型号为stm32。
30.需要说明的是,在本实施例中,通过控制三个电动伸缩杆3进行伸缩,使得三个电动伸缩杆3的长度变化,来调节支撑板2的高度和角度,从而调节摄像头6和显示屏17及各种传感器的角度和高度,方便了摄像头6从不同的角度进行拍摄,且支撑板2的高度可调,能够方便不同身高的人与该安防巡逻机器人进行互动。
31.在本实用新型的描述中,需要说明的是,术语“底”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
32.本说明书中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。