1.本实用新型涉及电能表测试用配套设备领域,具体涉及一种自动行走机械臂上下表设备。
背景技术:
2.电能表出厂前需要对其性能及参数进行检验测试,检验合格后方可允许出厂。在电能表检验测试时,需要将电能表上置于测试装置上,批量电能表测试结束后,再将电能表取下,多个合格的电能表放入电表箱内进行入库存放或直接出库。针对在检验测试过程中,电能表的上表以及下表均是由检验人员手动拿取进行上表和下表,针对批量的电能表,检验人员往往疲以应付,导致检验人员劳动量较大,检验的效率低下,而且上下表过程中电能表也极易掉落损坏。
技术实现要素:
3.本实用新型的目的是提供一种自动行走机械臂上下表设备,以解决现有技术中存在的人工上、下表导致劳动量大及检验测试效率低的问题。
4.为实现上述目的,本实用新型的一种自动行走机械臂上下表设备采用如下技术方案:一种自动行走机械臂上下表设备,包括壳体,壳体上设置有行走轮和行走轮动力机构,壳体上设置有多轴机器人,多轴机器人上设置有夹持装置;夹持装置包括安装板,安装板上设置有能够相对移动的第一活动夹板和第二活动夹板,安装板上设置有活动夹板驱动机构;安装板上还设置有用于位置对准的相机,安装板上还设置有用于识别电能表上电子信息的识别装置。
5.所述识别装置包括用于读取电能表上电子标签的读卡器或者包括用于扫描电能表上条形码或二维码的扫描枪。
6.所述安装板上设置有气动手指,气动手指包括气缸和两个活动指板,各活动指板形成相应的活动夹板,气缸形成上述活动夹板驱动结构。
7.其中一个活动指板具有第一夹持部,另外一个活动指板具有间隔设置的第二夹持部和第三夹持部,第一夹持部正对第二夹持部与第三夹持部之间的间隙。
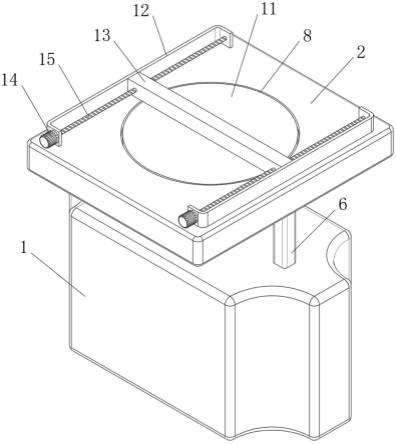
8.所述壳体上设置有供电表箱放置的台阶,台阶上水平间隔并平行设置有能够升降的第一升降台和第二升降台,第一升降台上水平移动设置有第一移动臂,第二升降台上水平移动设置有第二移动臂,第一移动臂和第二移动臂水平平行设置,各移动臂上均设置有朝向对方凸起延伸的用于顶起相应电能箱的支撑凸起。
9.各升降台上均设置有导向座,导向座上设置有导向槽,相应移动臂上设置有与导向槽导向移动配合的导向部,各移动臂上均设置有长度沿移动臂长度延伸的齿条,升降台上设置有驱动电机,驱动电机的电机轴上设置有与齿条啮合的传动齿轮。
10.所述壳体上设置有导向轮用于与铺设的导轨导向移动配合安装。
11.本实用新型的有益效果:通过行走轮动机构控制该上下表设备的行走路线,上下
表均通过机器人和其上的夹持装置进行的,两个活动夹板及活动夹板驱动机构可以实现夹持电能表和松开电能表,相机具有视觉系统可以实现该设备的自动校正,确保位置对准的精准度,同时通过识别装置对抓取的电能表进行信息识别实现自动记录。相比于现有技术,该上下表设备能够代替人工,能够智能对检验测试装置进行上下电能表,不仅减少了工作人员的劳动量,而且大大提高了检验测试的效率。
附图说明
12.图1是本实用新型的一种自动行走机械臂上下表设备的一个实施例的结构示意图一;
13.图2是图1中a处的局部放大图;
14.图3是本实用新型的一种自动行走机械臂上下表设备的一个实施例的结构示意图二;
15.图4是图3中b处的局部放大图。
具体实施方式
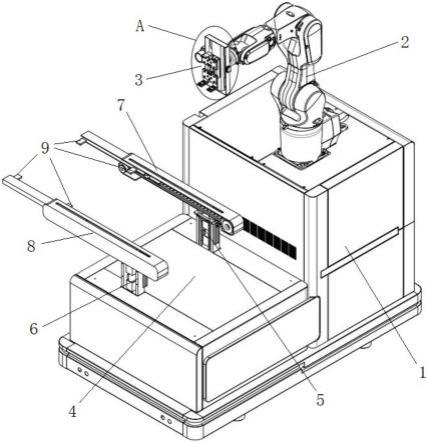
16.本实用新型的一种自动行走机械臂上下表设备的实施例,如图1-图4所示,包括壳体1,壳体1上设置有行走轮和行走轮动力机构,壳体上设置有导向轮用于与铺设的导轨导向移动配合安装。具体地,壳体和行走轮以及行走轮动力机构一起形成agv小车,行走轮及行走轮驱动机构均为现有技术,本实施例中不再详述其具体结构。
17.壳体1上设置有多轴机器人2,本实施例中多轴机器人采用六轴机器人,六轴机器人为现有技术,本实施例中不再详述其具体结构。多轴机器人上设置有夹持装置3。具体地,夹持装置包括安装板10,安装板上设置有能够相对移动的第一活动夹板13和第二活动夹板16,安装板上设置有活动夹板驱动机构。具体地,安装板上设置有气动手指,气动手指包括气缸和两个活动指板,各活动指板形成相应的活动夹板,气缸形成上述活动夹板驱动结构。其中一个活动指板具有第一夹持部15,另外一个活动指板具有间隔设置的第二夹持部16和第三夹持部24,第一夹持部正对第二夹持部与第三夹持部之间的间隙,即第一夹持部和第二、第三夹持部错开设置,可以更好的稳定夹持电能表。
18.安装板上还设置有用于位置对准的相机11,相机采用现有技术中带有视觉系统的相机进行位置对准,实现该设备的自动校正功能。安装板上还设置有用于识别电能表上电子信息的识别装置12。具体地,电能表上设置有电子标签,识别装置包括用于读取电能表上电子标签的读卡器,便于自动记录。
19.壳体上设置有供电表箱放置的台阶4,台阶上水平间隔并平行设置有能够升降的第一升降台5和第二升降台6,第一升降台上水平移动设置有第一移动臂7,第二升降台上水平移动设置有第二移动臂8,第一移动臂和第二移动臂水平平行设置。各移动臂上均设置有朝向对方凸起延伸的用于顶起相应电能箱的支撑凸起9。各升降台上均设置有导向座17,导向座上设置有导向槽18,导向槽也可以采用t形槽或燕尾槽,相应移动臂上设置有与导向槽导向移动配合的导向部19。各移动臂上均设置有长度沿移动臂长度延伸的齿条20,升降台上设置有驱动电机21,驱动电机的电机轴22上设置有与齿条啮合的传动齿轮23。
20.在使用时,在电能表检验测试装置旁铺设有导轨,该设备导向移动安装在导轨上,
台阶上放置有一个或两个以上的电表箱,沿导轨的长度方向依次设置有多个供电表箱放置的转运小车。机器人和夹持装置能够将检验测试装置上测试后的电能表取下放置于台阶上的电表箱中,也可以将电表箱中的电能表取出放置于检验测试装置上进行检验测试。第一移动臂和第二移动臂上的支撑凸起用于与相应电表箱的外壁沿上下支撑配合顶起电表箱,第一移动臂和第二移动臂可以在相应升降台作用下顶起电表箱。第一移动臂和第二移动臂的移动可以将台阶上放满检验测试后电能表的最上层的电表箱向外伸出放置于相应的转运小车上,同时也可以将转运小车上装有待检验测试的电能表的电表箱顶起并放置于壳体的台阶上,自动化程度高,检验测试效率高。
21.在本实用新型的其他实施例中,当电能表上设置有条形码或二维码时,识别设备包括用于扫描电能表上条形码或二维码的扫描枪;根据需要,多轴机器人也可以采用四轴机器人或五轴机器人;各移动臂也可以通过气缸驱动,而不通过齿条和传动齿轮进行驱动;活动夹板驱动机构也可以不采用气动手指,而采用两个单独的气缸分别驱动对应的活动夹板。
技术特征:
1.一种自动行走机械臂上下表设备,其特征在于:包括壳体,壳体上设置有行走轮和行走轮动力机构,壳体上设置有多轴机器人,多轴机器人上设置有夹持装置;夹持装置包括安装板,安装板上设置有能够相对移动的第一活动夹板和第二活动夹板,安装板上设置有活动夹板驱动机构;安装板上还设置有用于位置对准的相机,安装板上还设置有用于识别电能表上电子信息的识别装置。2.根据权利要求1所述的自动行走机械臂上下表设备,其特征在于:所述识别装置包括用于读取电能表上电子标签的读卡器或者包括用于扫描电能表上条形码或二维码的扫描枪。3.根据权利要求1所述的自动行走机械臂上下表设备,其特征在于:所述安装板上设置有气动手指,气动手指包括气缸和两个活动指板,各活动指板形成相应的活动夹板,气缸形成上述活动夹板驱动结构。4.根据权利要求3所述的自动行走机械臂上下表设备,其特征在于:其中一个活动指板具有第一夹持部,另外一个活动指板具有间隔设置的第二夹持部和第三夹持部,第一夹持部正对第二夹持部与第三夹持部之间的间隙。5.根据权利要求1-4中任意一项所述的自动行走机械臂上下表设备,其特征在于:所述壳体上设置有供电表箱放置的台阶,台阶上水平间隔并平行设置有能够升降的第一升降台和第二升降台,第一升降台上水平移动设置有第一移动臂,第二升降台上水平移动设置有第二移动臂,第一移动臂和第二移动臂水平平行设置,各移动臂上均设置有朝向对方凸起延伸的用于顶起相应电能箱的支撑凸起。6.根据权利要求5所述的自动行走机械臂上下表设备,其特征在于:各升降台上均设置有导向座,导向座上设置有导向槽,相应移动臂上设置有与导向槽导向移动配合的导向部,各移动臂上均设置有长度沿移动臂长度延伸的齿条,升降台上设置有驱动电机,驱动电机的电机轴上设置有与齿条啮合的传动齿轮。7.根据权利要求1所述的自动行走机械臂上下表设备,其特征在于:所述壳体上设置有导向轮用于与铺设的导轨导向移动配合安装。
技术总结
本实用新型涉及一种自动行走机械臂上下表设备。该设备包括壳体,壳体上设置有行走轮和行走轮动力机构,壳体上设置有多轴机器人,多轴机器人上设置有夹持装置;夹持装置包括安装板,安装板上设置有能够相对移动的第一活动夹板和第二活动夹板,安装板上设置有活动夹板驱动机构;安装板上还设置有用于位置对准的相机,安装板上还设置有用于识别电能表上电子信息的识别装置。相比于现有技术,该上下表设备能够代替人工,能够智能对检验测试装置进行上下电能表,不仅减少了工作人员的劳动量,而且大大提高了检验测试的效率。大大提高了检验测试的效率。大大提高了检验测试的效率。
技术研发人员:张小军
受保护的技术使用者:郑州优易达电子科技有限公司
技术研发日:2022.01.27
技术公布日:2022/6/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。