利用井眼声波数据反演地层各向异性常数的数据驱动方法
1.相关申请的交叉引用
2.本技术要求于2019年10月2日提交的美国临时专利申请62/909429的优先权,其全部内容以引用方式并入。
技术领域
3.本公开的方面涉及声波数据的操纵。更具体地,本公开的方面涉及使用声波数据反演地层各向异性常数的方法。
背景技术:
4.传统上,声波波形处理工作流程主要由地层压缩(dtc)和剪切(dts)慢度或p&s的评估组成。这两种测井记录可使用斯伦贝谢技术公司(schlumberger technology corporation)的设备通过来自单极或偶极发射器或四极发射器的波形提取。然而,大多数沉积岩表现出一定程度的各向异性。对于含有页岩的地质矿床来说尤其如此。这种各向异性效应在地质力学研究中起着重要作用。页岩中最常观察到的各向异性类型被称为垂直横向各向同性(vti),其中需要五个参数来描述弹性常数。使用在该领域中通常使用的符号语言,这种类型的各向异性可以由两个垂直慢度(即dtc和dts,或者通过两个速度,即vp0和vs0)和三个无量纲(所谓的“汤姆森(thomsen)”)参数∈、γ和δ来描述,对于各向同性地层,这些参数减小到零。这三个参数是建立地质力学分析的力学地球模型(mem)所必需的,例如估计岩石硬度、强度、应力、出砂预测、井筒稳定性和水力压裂设计。
5.上述三个汤姆森参数不能由井眼声波测井工具沿给定深度的单一取向直接测量。基于模型的反演方法用于估计这些各向异性常数。这种基于模型的反演方法不是稳健的,并且可能产生不可靠的结果,因为在成本函数中存在几个局部最小值,该成本函数由测量的井眼模式和理论的井眼模式之间的失配来定义。此外,还需要知道井下环境中的泥浆属性,以便可以计算基于模型的反演。然而,这些泥浆特性往往没有被测量。在某些情况下,这些泥浆属性值可能对井眼频散(dispersion)模式有很大影响。
6.因此,需要精确估计各向异性参数,包括三个汤姆森参数。
7.还需要精确估计作为深度函数的各向异性参数。
8.还需要使用物理约束的数据驱动方法来精确估计这些各向异性参数。
技术实现要素:
9.因而能够详细理解本公开的上述特征的方式,对本公开的更具体的描述,简要概括如下,可以通过参考实施例来获得,其中一些实施例示出在图中。要注意的是,附图仅说明了本公开的典型实施例,因此不应被视为对其范围的限制,因为本公开可以允许其他同等有效的实施例而无需具体叙述。因此,以下概述仅提供了描述的几个方面并且不应用于将所描述的实施例限制为单个概念。
10.在一个非限制性实施例中,公开了一种方法。该方法可以包括
11.获得波形并处理所获得的波形以获得斯通利频散、弯曲频散、四极频散和伪瑞利频散中的至少一种。该方法还可以包括对斯通利频散、弯曲频散、四极频散和伪瑞利频散的内插理论频散执行计算和获得库计算中的至少一个。该方法还可以包括使用对获得的波形的处理和对理论频散的内插来执行对泥浆慢度的初始估计,并且计算获得至少一个斯通利、弯曲、四极和伪瑞利频散的经处理的波形与斯通利、弯曲、四极和伪瑞利频散的理论频散之间的失配。该方法还可以包括将至少一个dtmud值估计为垂直深度剖面,并使用该至少一个估计的dtmud值来计算理论频散和经处理的波形之间的第二失配。该方法还可以包括通过最小化第二失配和使用回归来估计至少一个参数,计算多个深度上的至少一个参数。该方法还可以包括基于回归来更新至少一个参数的值,以及基于基于回归的至少一个参数的更新值来计算理论频散和测量频散之间的第三失配。该方法还可以包括通过最小化理论频散和测量频散之间的失配来估计至少一个参数的最终值。
12.在另一示例实施例中,可执行一种方法。该方法可以包括从地层中的声波井眼设备获得波形。该方法还可以包括处理从声波井眼设备获得的波形,以获得斯通利、弯曲、四极和伪瑞利频散的至少一个值。该方法还可以进一步包括执行计算以产生波形的斯通利频散、弯曲频散、四极频散和伪瑞利频散的理论频散。该方法还可以包括使用获得的波形的处理和理论频散来执行泥浆慢度的初始估计。该方法还可以包括计算获得至少一个斯通利、弯曲、四极和伪瑞利频散的经处理的波形与斯通利、弯曲、四极和伪瑞利频散的理论频散之间的第一失配。该方法还可以包括将至少一个dtmud值估计为垂直深度剖面,并且使用至少一个估计的dtmud值来计算理论频散和处理的波形之间的第二失配。该方法还可以通过最小化第二失配并使用回归来估计地层的至少一个汤姆森参数,计算多个深度上的至少一个修正的汤姆森参数。该方法还可以包括基于基于回归的汤姆森参数的更新值来计算理论频散和测量频散之间的第三失配。该方法还可以包括通过最小化理论频散和测量频散之间的失配来估计至少一个汤姆森参数的最终值。
附图说明
13.因而能够详细理解本公开的上述特征的方式,对本公开的更具体的描述,以上简要概括的,可以通过参考实施例来获得,其中一些实施例在附图中示出。然而,要注意,附图仅图示了本公开的典型实施例,因此不应被视为限制其范围,因为本公开可以允许其他同等有效的实施例。
14.图1是北海页岩a1岩心的合成单极斯通利(stoneley)和偶极(dipole)弯曲频散曲线图。
15.图2a是硬页岩g32岩心的合成单极斯通利和偶极弯曲频散曲线。
16.图2b是图2a的硬页岩g32岩心的伪瑞利(pseudo-rayleigh)频散曲线。
17.图3a是北海页岩a1岩心样本的单极斯通利频率对泥浆慢度的灵敏度图。
18.图3b是图3a的岩心样本的单极斯通利频率对汤姆森参数∈、γ和δ的灵敏度图。
19.图4a是北海页岩a1岩心样本的频率偶极弯曲频散对泥浆慢度的灵敏度图。
20.图4b是图4a的岩心样本的偶极弯曲频散频率对汤姆森参数∈、γ和δ的灵敏度图。
21.图5a是硬页岩g32岩心样本的单极斯通利频率对泥浆慢度的灵敏度图。
22.图5b是图5a的岩心样本的单极斯通利频率对汤姆森参数∈、γ和δ的灵敏度图。
23.图6a是硬页岩g32岩心样本的偶极弯曲频率和泥浆慢度的灵敏度图。
24.图6b是图6a的岩心样本的∈、γ和δ的汤姆森参数的偶极弯曲频率的灵敏度图。
25.图7a是硬页岩g32岩心样本的伪瑞利频率对泥浆慢度的灵敏度图。
26.图7b示出了图7a的岩心样本的伪瑞利频率对∈、γ和δ的汤姆森参数的灵敏度图。
27.图8a是使用表1中数据的γ和∈的相关图。
28.图8b是使用表1中数据的∈和δ的相关图。
29.图9是表1中报告的岩心数据的局部相关性,其中带有“x”和“o”的符号代表两种不同的局部岩性。
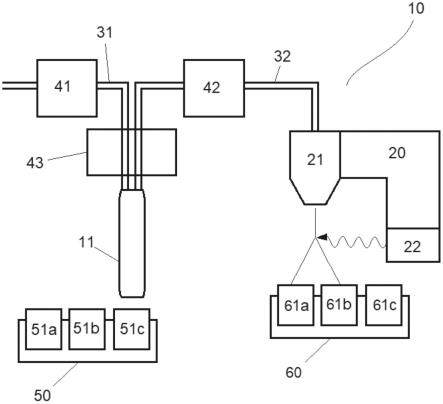
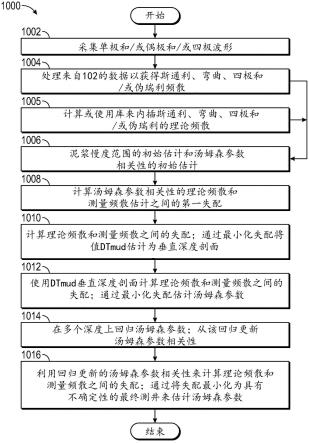
30.图10是说明本发明的一个非限制性示例实施例中的数据驱动反演过程的方法。
31.图11是使用8个合成岩心数据并假设线性泥浆慢度剖面的合成测试的描绘。从左到右:井眼直径(道(track)1)、地层密度(道2)、压缩慢度(道3)、剪切慢度(道4)、频率从1到8khz的偶极弯曲和斯通利频散(道5)、dtmud的不同值的失配图(道6)、γ的不同值的失配图(道7);不同∈值的失配图(道8);不同δ值的失配图(道9)。用点表示的反演泥浆慢度和用实线表示的真实泥浆慢度在道5中重叠。
32.图12是使用8个合成岩心数据并假设线性泥浆慢度剖面的具有反演的泥浆慢度平均值和深度梯度的合成测试的描述。反演值示出在“o”中,而真实值示出在“x”中。
33.图13a至13c是第二合成测试的描述,其中在图13a(a)中,使用5个合成岩心数据并假设恒定的泥浆慢度剖面的反演结果。从左到右:井眼直径(道1)、地层密度(道2)、压缩慢度(道3)、剪切慢度(道4)、频率从1到8khz的偶极弯曲和斯通利频散(道5)、dtmud的不同值的失配图(道6)、不同γ值的失配图(道7);不同∈值的失配图(道8);不同δ值的失配图(道9);道6至8的红点代表失配图中的峰值。在某些深度,我们可以观察到多个峰值,它们代表了所构建的失配图中的多个局部最小值。在图13b中,描绘了随深度变化的叠加泥浆慢度,在图13c中,使用196us/ft的叠加(stack)泥浆慢度示出了第二步反演,其中从左到右:不同γ值的失配图(道1);不同∈值的失配图(道2);不同δ值的失配图(道3)。请注意,虚线代表不确定性,其由小于1us/ft的失配值计算得出。由于泥浆慢度叠加为196us/ft,与步骤1相比,步骤2中的汤姆森参数估计现在具有更少的不确定性。
34.图14a至14d示出了第二次合成测试的结果。在图14a中,初始相关范围在∈和γ之间。在图14b中,使用5个合成岩心数据并假设恒定的泥浆慢度剖面来说明第二遍反演结果。从左至右,不同γ值的失配图(道1);不同∈值的失配图(道2);不同δ值的失配图(道3)。在图14c中,示出了在第二遍反演之后∈和γ之间的新的相关范围。在图14d中,示出了第三遍反演结果,其中使用了新的相关范围。请注意,虚线代表不确定性,其由小于1us/ft的失配值计算得出。随着γ和∈相关范围的减小,与步骤2相比,步骤3中汤姆森参数的估计现在具有更少的不确定性。
35.为便于理解,在可能的情况下,已使用相同的附图标记来表示附图(“图”)中相同的元件。可以设想,在一个实施例中公开的元件可以有益地用在其他实施例中,而无需具体叙述。
具体实施方式
36.在下文中,参考了本发明的实施例。然而,应当理解,本公开不限于具体描述的实
施例。相反,以下特征和元素的任何组合,无论是否与不同的实施例相关,都被认为可以实现和实践本公开。此外,尽管本公开的实施例可以实现优于其他可能的解决方案和/或现有技术的优点,但是特定的优点是否由给定的实施例实现并不限制本公开。因此,以下方面、特征、实施例和优点仅仅是说明性的,并且不被认为是权利要求的要素或限制,除非在权利要求中明确陈述。同样,对“本公开”的引用不应被解释为本文公开的发明主题的概括,并且不应被认为是权利要求的要素或限制,除非在权利要求中明确陈述。
37.虽然术语第一、第二、第三等可以在这里用来描述各种元件、部件、区域、层和/或部分,但是这些元件、部件、区域、层和/或部分不应该受到这些术语的限制。这些术语仅用于将一个元件、部件、区域、层或部分与另一个区域、层或部分区分开来。如“第一”、“第二”和其它数字术语的术语,当在此使用时,并不意味着顺序或次序,除非上下文明确指出。因此,在不脱离示例实施例的教导的情况下,这里讨论的第一元件、部件、区域、层或部分可以被称为第二元件、部件、区域、层或部分。
38.当元件或层被称为“位于”、“接合至”、“连接至”或“联接至”另一元件或层时,其可直接位于、接合、连接、联接至另一元件或层,或可存在交错元件或层。相反,当一个元件被称为“直接在”另一个元件或层上、“直接接合到”、“直接连接到”或“直接联接到”另一个元件或层时,可能不存在交错的元件或层。用于描述元件之间关系的其他词语应该以类似的方式解释。如本文所用,术语“和/或”包括一个或多个相关列出术语的任何和所有组合。
39.现将参照附图描述一些实施例。为一致起见,各图中相似的元件将用相似的数字来表示。在以下描述中,阐述了许多细节以提供对各种实施例和/或特征的理解。然而,本领域技术人员将理解,一些实施例可以在没有这些细节的情况下实施,并且对所描述的实施例的许多变化或修改是可能的。如本文所用,术语“上方”和“下方”、“上”和“下”、“上部”和“下部”、“向上”和“向下”,以及表示给定点上方或下方的相对位置的其他类似术语在本说明书中用于更清楚地描述某些实施例。
40.所述方面适用于井眼声波波形处理领域。所述方法的应用可以提供各向异性弹性常数(例如,垂直横向各向同性(vti)地层中的三个汤姆森参数)的大小和不确定性的量化,以及作为深度的函数的井眼泥浆慢度。所描述的方法可以与配备有单模发射器或多模发射器的声波测井工具一起使用。呈现的实施例适用于缆线(wireline)和随钻测井工具。获得的各向异性弹性常数可用于岩石物理和地质力学应用。
41.本发明的各方面的目标是使用物理约束数据驱动方法,提供各向异性参数(例如,三个汤姆森参数)以及作为深度函数的井眼泥浆慢度的估计。整个工作流程/方法可以包括三个步骤。首先,执行全面的随机或网格搜索算法,以将所有可能的理论井眼频散曲线与声波测井工具的测量井眼模式相匹配。搜索范围是基于某些初始物理或经验相关性来约束的。第一步可以给出泥浆慢度的粗略估计,作为深度上的线性剖面、多线性剖面或非线性剖面。然后在第二步中,使用从第一步获得的泥浆慢度的线性、多线性或非线性剖面重复相同的频散匹配过程。第二步可以给出各向异性参数(例如,汤姆森参数)的估计。因为经常观察到各向异性参数遵循给定地层的某些强相关性,所以可以应用线性回归或非线性回归方法,以使用第二步中的反演结果来获得局部相关性模型。最后,作为第三步,重复搜索过程以匹配测量的井眼模式频散,而新约束的相关性被应用于定义各向异性参数的搜索范围,从而可以获得各向异性参数的更可靠的估计。
42.注意,上述工作流程/方法是可能的示例之一;在应用中,我们可以在反演工作流程中应用多于或少于3个步骤。步骤的顺序可以改变。请注意,在第一步中,回归的dtm剖面可能与某些不确定性相关联,这些不确定性也可以带入第二步。
43.井眼频散模式对泥浆慢度和各向异性弹性常数的灵敏度
44.提供了几个建模示例,以说明井眼模式对地层和泥浆特性的灵敏度,并解释如何根据这些观察结果估算汤姆森参数和泥浆慢度。
45.考虑具有不同参数的快速地层或慢速地层中的缆线裸眼声波测井工具,如表1所列的,其中c
11
,c
33
,c
44
,c
13
,c
66
为五个独立的vti弹性常数,ρ为体积密度,∈,γ,δ为各向异性汤姆森参数。
46.表1:实验室测量的来自[3][4]和[5]的岩石样本的线性弹性常数
[0047][0048][0049]
在所有这些岩心样本中,选择了两个代表性样本(北海页岩a1和硬页岩g32)来研究它们对泥浆慢度和vti参数的频散灵敏度。
[0050]
图1说明了使用表1中的北海页岩a1岩心数据的地层岩石特性的斯通利和弯曲模式的合成频散。在合成建模中,井眼直径为7英寸(inch)。泥浆慢度为200微秒/英尺(μs/ft)。泥浆密度为1000kg/m3。图2a说明了硬页岩g32岩心样本的合成单极斯通利和偶极弯曲频散图,图2b说明了硬页岩g32岩心样本的合成伪瑞利频散图。
[0051]
为了研究灵敏度,在实施例中,使用以下表达式来分别计算对泥浆慢度、汤姆森γ,∈,δ的灵敏度:
[0052]
灵敏度
[0053]
灵敏度
[0054]
灵敏度
[0055]
灵敏度
[0056]
其中上标“mode”可以代表不同的井眼模式,如斯通利、偶极弯曲、伪瑞利或四极等,dtm,∈,γ,δ分别表示泥浆慢度和汤姆森参数(∈,γ,δ),s0表示参考状态下的频散曲线,以及s(δdtm)、s(δ∈)、s(δγ)和s(δδ)分别表示由于dtm,∈,γ,δ的小扰动引起的频散曲线。
[0057]
图3和图4分别绘制了北海页岩a1岩心数据的斯通利频散和偶极频散对不同输入参数的灵敏度分析。图5、图6和图7分别绘制了硬页岩g32岩心样本的斯通利频散、偶极频散和伪瑞利频散对不同输入参数的灵敏度分析。
[0058]
注意,灵敏度是dtm,∈,γ,δ中扰动的非线性函数。在灵敏度分析中,我们给出了这些参数的小扰动。例如,在图3a、图4a、图5a、图6a和图7a中,通过5%的泥浆慢度的扰动来计算对泥浆慢度的慢度灵敏度。另一方面,在图3b、图4b、图5b、图6b和图7b中,通过5%的汤姆森参数的扰动来计算对汤姆森参数的慢度灵敏度。
[0059]
从这些灵敏度分析中,可以观察到,所有这四个未知数(即,泥浆慢度、∈、γ和δ)可能对频散曲线有非常不同的影响,视具体情况而定。因此,在反演工作流中不能忽略这些值。在一实施例中,作为一般情况,所有4个参数被反演(对于vti情况)并且不确定性被量化。此外,由于不同模式之间的灵敏度行为可能非常不同,所有可用的井眼模式都用于反演,以提高反演的稳定性。
[0060]
vti参数之间的相关性
[0061]
如前一部分所述,所有各向异性参数和泥浆慢度(即,dtm、γ、∈、δ)需要在反演中被视为未知数。然而,即使当我们使用来自单极、偶极和四极发射器的所有可用频散模式时,这样的反演也可能是非常病态的。为了克服这个挑战,我们使用汤姆森参数和其他已知参数之间的物理或经验相关性来约束和稳定我们的反演。例如,图8a使用表1中的所有岩心数据绘制了∈和γ之间的相关性,图8b绘制了∈和δ之间的相关性。我们可以从图8a中看到0.5γ《∈《2γ的经验界限(bound),从图8中看到δ《∈的经验界限。这些界限可以用来稳定反演。此外,这种界限可以在反演过程中更新。例如,图9绘制了表1中列出的一些岩心数据,我们可以看到这些数据可以分为两组,一组是∈》γ的,另一组是∈《γ的。这种新的关系可
以通过使用数据驱动的方法在反演过程中获得,这将在下一部分中讨论。
[0062]
使用斯通利散射、偶极散射和/或伪瑞利散射来反演汤姆森参数和泥浆慢度的方法
[0063]
本部分针对vti地层制定了反演方法,其中理论频散可写为:
[0064][0065]
其中11个输入参数a,ρb,ρm,dtc,dts,dtm,∈,γ,δ,well_devi,tool_azim分别表示井眼半径、地层密度、泥浆密度、地层压缩和剪切垂直慢度、泥浆慢度、汤姆森参数(∈,γ,δ)、井斜和井中的工具方位角方向。上标“mode(模式)”代表不同的模式,如斯通利(st),偶极弯曲(fl),伪瑞利(pr)或四极(qd)。
[0066]
如果多模式采集在工具中可用,理论频散可合并为:
[0067][0068]
反演过程可以通过将理论频散与测量频散相匹配来完成。匹配处理是通过对给定范围内的未知参数进行均匀或随机采样来完成的。基于以上对物理或经验相关性的讨论,我们可以将∈和δ的范围定义为
[0069]kmin
γ<∈<k
max
γ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3),
[0070]
l
min
∈<δ<l
max
∈.
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0071]
这两个条件有助于我们缩小匹配过程中的搜索范围,从而提高性能和稳定性。最后,测量频散和理论频散之间的失配可以由以下计算:
[0072]
e=||d
theory-d
measured
||
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0073]
反演工作流程由几个步骤组成(图10)。例如,在第一步中,通过最小化等式5来运行反演,其中最小化可以在dtm的初始猜测以及由等式3和4所约束的∈、γ和δ的初始范围内通过随机搜索或通过网格搜索来实现。
[0074]
接下来,基于dtm在两个连续测井深度上逐渐变化的事实(例如,0.5英尺。这是通常在工业中使用的),在第一步之后,线性回归、非线性回归或目测方法可以用于优化泥浆慢度,作为测井深度上的线性剖面、多线性剖面或非线性剖面。泥浆慢度深度剖面可以与从回归方法获得的不确定性相关联。
[0075]
然后,反演可作为第二步再次运行,其中通过使用第一步的回归剖面缩小dtm的范围,有或没有不确定性。因为dtm现在具有更窄的范围或者是单个值,所以反演的汤姆森参数可以比第一步更稳定。因此,应用线性回归、非线性回归或目测法来优化等式3和4格式的∈、γ和δ之间的范围。回归可以给出k
min
,k
max
,l
min
,和l
max
的新的减小的范围。
[0076]
最后,作为第三步,使用新回归的k
min
,k
max
,l
min
,和l
max
的范围再次进行反演,以获得汤姆森参数的最终结果,具有或不具有不确定性。
[0077]
重要的是要注意,物理或经验约束条件,如等式3和等式4,可直接扩展为基于数据可用性,与其他已知(例如,其他岩石物理输入)或未知参数合并更多相关性。此外,理论和测量数据可以扩展以添加其他模式,如套管频散和随钻测井或套管井测井场景中的工具弯曲模式。
[0078]
说明性示例
[0079]
综合情况测试#1
[0080]
图11至图14展示了这种数据驱动的物理约束反演方法的合成示例。在图11中,8个岩心样本数据用于生成合成斯通利和弯曲频散(道5)。在生成这些合成频散时,作为说明性示例,假设线性泥浆慢度剖面,而实际上泥浆慢度也可以假设为非线性的。道1至4分别绘出了井眼直径、地层密度、压缩和剪切慢度。计算出的失配被投影到泥浆慢度轴上,并绘制在道6中。根据失配值,可以使用线性曲线的两个参数来回归线性泥浆慢度:测井间隔的中间深度的泥浆慢度值和泥浆慢度深度梯度,如图12所示。可以看出,回归的泥浆慢度剖面与真实剖面非常匹配。然而,我们也可以看到,汤姆森参数的最小化在这一步中没有很好地定义。如前所述,使用回归的泥浆慢度的第二步反演因此是必要的。
[0081]
综合情况测试#2
[0082]
图13说明了回归的泥浆慢度如何有助于提高vti参数的稳定性的情况。在这种情况下,选择五个岩心样本作为输入。这五个岩心样本取自同一个场所,因此汤姆森参数之间的相关性可以代表一局部范围。在这种情况下,假设泥浆慢度的剖面不变。图13a示出了第一步反演,从中可以看出,虽然从道7到道9的三个汤姆森参数可能存在失配图,但是它们的最小值具有很大的不确定性。
[0083]
在图13b中,泥浆慢度值被叠加以获得5个深度的平均值,并将该平均值应用于第二步反演,如图13c所示。请注意,道中的虚线表示不确定性,通过查找小于1us/ft的不匹配值来计算不确定性。由于泥浆慢度叠加为196us/ft,与步骤1相比,步骤2中的汤姆森参数估计现在具有更少的不确定性。
[0084]
图14说明了汤姆森参数之间的更新相关性如何有助于进一步稳定反演的情况。图14a示出了∈和γ之间的初始相关性。第二步反演在图14b的道1至3中示出,其中点是失配峰值。在图14c中,峰值在5个深度上重叠(overlaid),然后绘制成交叉图。在该综合测试中,使用了来自同一场所的岩心样本,因此可以回归出∈和γ之间新的简化相关性。例如,通过线性回归方法获得这种定域关系(localized relationship),其给出1.0γ《∈《1.6γ,如图14c的虚线所示。最后,在图14d的道1至3所示的第三步反演中,应用从图14c获得的1.0γ《∈《1.6γ的新相关性。随着γ和∈相关范围的减小,与步骤2相比,步骤3中汤姆森参数的估计现在具有更少的不确定性。请注意,虚线表示不确定性,通过查找小于1us/ft的不匹配值来计算。
[0085]
在1002处,采集单极和/或偶极和/或四极波形。在1004处,单极和/或偶极和/或四极波形被处理以获得斯通利、弯曲、四极和/或伪瑞利频散。在1004中可以使用不同的方法,例如tko、spi和sdice。tko在ekstrom,m.e.的"dispersion estimation from borehole acoustic arrays using a modified matrix pencil algorithm,"29th asilomar conf.signals systems and computing,pacific grove,ca,october 31,1995,进行了描述。在1005处,可以执行计算或者可以使用库来内插斯通利、弯曲、四极和/或伪瑞利的理论频散。在1006处,使用来自1004和1005的数据,该方法继续执行泥浆慢度范围的初始估计和汤姆森参数相关性的初始估计。在1008处,该方法继续计算理论频散和测量频散之间的失配。在1008中,通过最小化理论频散和测量频散之间的失配,可以将值dtmud估计为垂直深度剖面。在1010处,使用dtmud垂直深度剖面执行理论和测量的频散之间的失配的第二次计算。在1010中,可以通过最小化在步骤1010中计算的失配来估计汤姆森参数。在1012处,使用回归,在多个深度上计算汤姆森参数。可以从回归中更新汤姆森参数值。在1014处,用在
1012获得的回归更新参数计算理论频散和测量频散之间的失配。在1014处,可以通过将失配最小化为具有不确定性的最终测井来估计汤姆森参数。
[0086]
现将公开示例实施例。这些示例实施例不应被认为是限制性的。在一个非限制性实施例中,公开了一种方法。该方法可以包括获得波形并处理所获得的波形,以获得斯通利、弯曲、四极和伪瑞利频散中的至少一种。该方法还可以包括对斯通利频散、弯曲频散、四极频散和伪瑞利频散的内插理论频散执行计算和获得库计算中的至少一个。该方法还可以包括使用对获得的波形的处理和对理论频散的内插来执行对泥浆慢度的初始估计,并且计算获得至少一个斯通利、弯曲、四极和伪瑞利频散的经处理的波形与斯通利、弯曲、四极和伪瑞利频散的理论频散之间的失配。该方法还可以包括将至少一个dtmud值估计为垂直深度剖面,并使用该至少一个估计的dtmud值来计算理论频散和经处理的波形之间的第二失配。该方法还可以包括通过最小化第二失配和使用回归来估计至少一个参数,计算多个深度上的至少一个参数。该方法还可以包括基于回归来更新至少一个参数的值,以及基于基于回归的至少一个参数的更新值来计算理论频散和测量频散之间的第三失配。该方法还可以包括通过最小化理论频散和测量频散之间的失配来估计至少一个参数的最终值。
[0087]
在另一个示例实施例中,可执行该方法,其中波形由井筒声波设备产生。
[0088]
在另一示例性实施例中,可执行该方法,其中波形为单极、偶极和四极波形中的至少一种。
[0089]
在另一个示例性实施例中,可执行该方法,其中对获得的波形进行处理以获得斯通利、弯曲、四极和伪瑞利频散中的至少一种,使用tko、spi和sdice方法中的一种。
[0090]
在另一示例实施例中,可执行该方法,其中通过最小化理论频散和测量频散之间的失配来估计dtmud值。
[0091]
在另一示例实施例中,可执行该方法,其中通过最小化第二失配估计的至少一个参数是汤姆森参数。
[0092]
在另一示例实施例中,可执行该方法,其中汤姆森参数为三个汤姆森参数。
[0093]
在另一示例实施例中,可执行该方法,其中最终值为汤姆森参数。
[0094]
在另一示例实施例中,可执行一种方法。该方法可以包括从地层中的声波井眼设备获得波形。该方法还可以包括处理从声波井眼设备获得的波形,以获得斯通利、弯曲、四极和伪瑞利频散的至少一个值。该方法还可以进一步包括执行计算以产生波形的斯通利频散、弯曲频散、四极频散和伪瑞利频散的理论频散。该方法还可以包括使用获得的波形的处理和理论频散来执行泥浆慢度的初始估计。该方法还可以包括计算获得至少一个斯通利、弯曲、四极和伪瑞利频散的经处理的波形与斯通利、弯曲、四极和伪瑞利频散的理论频散之间的第一失配。该方法还可以包括将至少一个dtmud值估计为垂直深度剖面,并且使用至少一个估计的dtmud值来计算理论频散和处理的波形之间的第二失配。该方法还可以通过最小化第二失配并使用回归来估计地层的至少一个汤姆森参数,计算多个深度上的至少一个修正的汤姆森参数。该方法还可以包括基于基于回归的汤姆森参数的更新值来计算理论频散和测量频散之间的第三失配。该方法还可以包括通过最小化理论频散和测量频散之间的失配来估计至少一个汤姆森参数的最终值。
[0095]
在另一示例性实施例中,可实施该方法,其中地层为各向异性地层。
[0096]
在另一示例性实施例中,可执行该方法,其中波形为单极、偶极和四极波形中的至
少一种。
[0097]
在另一个示例性实施例中,可执行该方法,其中对获得的波形进行处理以获得斯通利、弯曲、四极和伪瑞利频散中的至少一种,使用tko、spi和sdice方法中的一种。
[0098]
在另一示例实施例中,可执行该方法,其中通过最小化理论频散和测量频散之间的失配来估计dtmud值。
[0099]
在另一示例性实施例中,可执行该方法,其中汤姆森值为三个值。
[0100]
出于说明和描述的目的,已提供了实施例的前述说明。它并不旨在穷举或限制本公开。特定实施例的单个元件或特征通常不限于该特定实施例,但是在适用的情况下,即使没有具体示出或描述,它们也是可互换的,并且可以用于选定的实施例中。同样的可以有许多不同的方式。这种变化不应被视为背离本公开,并且所有这种修改都旨在包括在本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。