1.本文描述一种组件处理装置及一种相应的方法。该组件处理的细节在权利要求书中有所定义;说明书及附图含有对组件处理装置及工作方式以及对组件处理装置的方案的相关说明。
2.本文还描述一种组件检查装置及一种相应的方法。该组件检查的细节在权利要求书中有所定义;说明书及附图含有对组件检查及工作方式以及对组件检查装置的方案的相关说明。
背景技术:
3.组件在此例如为电子组件,也称为“芯片”或“管芯”。这种组件通常具有棱柱形的外形以及大体呈多边形,例如四边形(矩形或正方形)的横截面,此横截面包含多个侧面以及前或顶面或顶或底覆盖面。此组件的侧面在下文中被同义地称为侧面。此组件还可具有数目不等于四的侧面。组件还可为电子和/或光学组件(棱镜、反射镜、透镜等),或者包括上述电子和/或光学组件。总体而言,组件可具有任何几何形状。
4.由申请人的操作实践已知所谓的拾取与放下装置,在其中通过拾取工具从基板拾取组件,随后将其放置在载体上或者运输容器或诸如此类中。在放置组件前,对该组件进行检查。为此,用一个或多个相机记录此组件的一个或多个侧面的图像,并通过自动化的图像处理进行评估。
5.ep 1 470 747 b1涉及一种芯片移除装置、一种芯片移除系统、一种装配系统以及一种移出并进一步处理芯片的方法。将芯片从晶圆移出并输送至输送位置,同时使其翻转。用于将芯片从有结构的半导体晶圆移出的移除装置设有用于将芯片从晶圆移出并使得移出的芯片围绕其纵轴或横轴以180
°
翻转的可旋转移除工具,以及与可旋转移出工具共同作用、用于将移出的芯片围绕其纵轴或横轴以180
°
再次翻转的可旋转翻转工具。移出工具具有第一输送位置,翻转工具具有第二输送位置,芯片可在第二输送位置上被输送至装配头以进行进一步处理。
6.ep 0 906 011 a2涉及一种用于移出及装配电子组件到基板上的装置。此装置包括可旋转的输送装置,此输送装置在拾取位置上从进料模块移出电子组件,并在第一输送位置上输送至吸带以进行进一步处理。通过可旋转的装配头从吸带拾取这些组件,并输送至第二输送位置。
7.wo 02/054480 a1涉及一种对待安装芯片的不同面进行光学检查的装置。此装置包括第一上运输盘,其被配置为,将芯片从进料单元移出,并输送至第一输送位置。芯片保持在形成在上运输盘的侧面上的吸入口中,并通过上运输盘的旋转而运动。此装置还具有对应于上运输盘的第二下运输盘,此下运输盘在第一输送位置上接收被移出的芯片,并输送至第二输送位置。此装置可通过如下方式对芯片进行检查:相机布置在运输盘侧边,以便检查芯片的面及底面。将芯片未相对原本的定向翻转地输送至分拣装置以进行进一步处理。
8.us 4,619,043公开一种装置及一种方法,用于在印刷电路板上移出及安装电子组件,特别是芯片。此装置包括输送构件,用于在拾取单元中拾取芯片并将所拾取的芯片输送至第一输送位置。其中,输送构件具有相互啮合在一起的输送链及可旋转的链轮。此装置还具有可旋转的安装工具,其具有用于在第一输送位置上拾取芯片的装配头。紧固工具还被配置为,通过旋转运动将所拾取的芯片输送至第二输送位置,其中使得芯片翻转。
9.jp 2-193813涉及一种用于拾取由检查设备检查的电子元件并使其换向的设备。此装置包括进料单元,通过第一旋转体将芯片状的电子组件从此进料单元取出并将其布置在此旋转体圆周。通过旋转体的旋转运动将电子组件输送至第一输送位置,从而使得电子组件围绕其纵轴或横轴翻转。此装置还包括第二旋转体,其在第一输送位置上拾取被移出的电子组件,并将它们输送至第二输送位置。从而,电子组件围绕其纵轴或横轴实施另一翻转。此装置能够对组件的不同侧进行检查。
10.其他技术背景参阅文献ep 3 336 024 a1、ep 1 588 402 b1、wo 2017/220 245 a1、wo 2019/039 568 a1、jp 502 94 39 a、kr 2017001 86 07 a、jp 2018 077 083 a、jp 599 98 59 b1、us 9,261,463 b2、wo 2018/110 500 a1、wo 2019/009 381 a1、wo 2016/080 162 a1、wo 2019/039 552 a1、kr 2012 096 37 b1、ep 2 075 829 b1、jp 5975 556 b1、wo 2014 112 041 a1、wo 2015 083 211 a1、wo 2017 022074 a1、wo 2013/108 398 a1、wo 2013/084 298 a1、wo 2012/073285 a1、us 9,510,460 b2、jp 49 11 714 b2、us 7,191,511 b2、jp 5510 923 b2、jp 57 83 652 b2、jp 2007 095 725 a、jp 2012 116 529 a、jp 2001-74664 a、jp 1-193630 a、us 5,750,979、de 199 13 134 a1、jp 8 227 904 a。技术问题
11.在将(半导体)组件与基板/晶圆箔分离并通过拾取工具(例如负压吸管)拾取组件时,会在拾取工具上形成组件的位置公差。组件在拾取工具上的位置及旋转的偏离受多个参数影响:组件与基板/晶圆箔之间的黏着、用来将组件从基板/晶圆箔释放的针的抬升高度、针相对组件的中心的位置、拾取工具的反作用力、拾取工具在拾取组件时相对组件的中心、拾取工具处的负压的强度、可供使用的用来形成用于拾取组件的负压的时间、组件的朝向拾取工具的表面特性、拾取工具的表面特性等等。
12.此外,工业上对能够光学识别出组件上越来越小的缺陷的要求同样不断提高。可通过适宜的镜头以及与其相匹配的对待检查组件的照明来对缺陷进行光学识别。然而可用的镜头在必要的图像锐度及越来越小的景深下达到极限。由于组件在拾取工具上的位置有所偏离且镜头的景深较小,光学检查的质量有限。在离焦的组件上识别出缺陷的可能性较小。如此便会错误地将有缺陷的组件不识别为功能失灵的,并对其进行进一步处理/封装。
13.根据该问题的传统解决方案是在光学评估上游设有用于组件的居中工位,以提高光学组件检查的质量。其中,对组件的x位置及y位置以及旋转进行测量。随后,通过沿x方向及y方向移动及旋转拾取工具来对组件的x位置及y位置以及旋转进行校正。采用该解决方案时,每个拾取工具都必需额外配设旋转驱动器,或该拾取工具如此设计,使得驱动器能够接合每个拾取工具。作为替代方案,转动拾取工具,且评估相机沿x方向及y方向相对组件位移。另一传统变型涉及将组件放置在载体上,在载体上对准组件的x位置及y位置以及旋转,随后,再用拾取工具从载体拾取组件。在重新从载体拾取组件时存在组件再次相对拾取工具滑动的风险。
14.用于对电子组件的全部(四个)侧面(以及视情况一或两个顶面)进行视觉检验的系统(参见上文)要么具有两个或两个以上的共同作用的运输体(例如运输轮、运输星轮、运输带),要么具有成像系统的复杂配置。采用两个或两个以上的运输体时,必须将电子组件从一个运输体输送至另一运输体,并重新校准以进行视觉检验。这些解决方案成本高,且处理量(单位时间内所检验的电子组件的数目)有限。本发明所提出的解决方案应能够以相对于先前技术有所改进的方式精确地处理组件,并且以高处理量对这些组件进行检查。
技术实现要素:
解决方案
15.本文提供一种装置及一种方法。该装置具有至少一个拾取工具,其布置在翻转装置上的并且用于对准和光学检查处于相应拾取工具上的组件。拾取工具被设计及配置为在相应组件的多个顶面中的一个上拾取该组件。翻转装置被设计及配置为,使得拾取工具在翻转平面内围绕翻转轴旋转,并且将处于拾取工具上的组件从拾取位置可选地输送至至少一个定向位置、可选地输送至至少一个检查位置、输送至放下位置及可选地输送至弹出位置。该装置被设计及配置为,处理具有多个待进行光学检查的侧面的组件。为此,该装置具有朝向拾取位置的用于组件供应的保持及进料装置。该组件储库可为(薄膜)基板,在其朝向拾取工具的一侧上设有彼此分离的组件。卸料装置被设计及配置为,每次将这些组件中的一个从处于保持及进料装置中的组件储库朝处于拾取位置上的相应拾取工具方向输送或输送至该拾取工具。保持及进料装置被设计及配置为,将组件储库的全部或仅相应的待释放的组件如此地相对处于拾取位置上的拾取工具对准,从而使得组件的与翻转平面成锐角的一个或每个待进行光学检查的侧面与该翻转平面成约30
°
至约60
°
的角,或者,组件的与翻转平面成钝角的一个或每个待进行光学检查的侧面与该翻转平面成约120
°
至约150
°
的角。因此,组件的侧面例如可与装置的正交主对准轴x、y对齐,而装置的翻转平面定向在x、y轴的角平分在线或与该角平分线平行定向。
16.这种配置仅具一个仅在一个翻转平面内旋转的翻转装置。因此,组件相对该翻转平面被从拾取位置以成角度定向的方式输送至放下位置。如此便能将拾取工具上的组件在该角度定向上对准,随后,在其侧面/其边缘上进行光学检查,而不需要将光学检查装置的元器件引入组件的翻转或运输路径。换言之,组件的侧面都不平行于翻转平面或不与翻转平面成直角。
17.这种配置还实现更快速的维护,特别是在装置即将运行前对该装置及特别是该拾取工具进行调节,因为翻转装置及与其共同作用的元器件更容易接近。不需要出于维护或调节需要额外地移除元器件或模块。因此,例如拾取工具的吸管需要相对成像设备进行定期调节,或者因磨损或待处理组件的不同特性而需要进行更换。这允许整体上实现更大的待处理/待检查组件处理量。
18.除上述拾取位置、定向位置、检查位置、放下位置及弹出位置外或者作为其替代,在其他位置上还可设有其他处理工位,例如电测试工位或黏着剂喷嘴。
19.通过在此提出的配置,可更好地接近翻转装置,因为该翻转装置沿其圆周实际上为无阻碍的。此方案不同于已知配置,在已知配置中,翻转装置上方的组件储库及翻转装置下方的接收装置对翻转装置的接近造成限制,控制装置及供应管线从背侧对翻转装置的接
近造成限制,且布置在翻转装置的径向外圆周上的处理工位对接近造成限制。
20.组件的运输路径处于组件的两个平行的边缘之间,这些边缘在组件的上、下顶面之间延伸。这些边缘分别终止于下顶面及上顶面的相对的角中。这两个平行的边缘处于横向于翻转平面的平面内。组件的运输路径处于该翻转平面内或与其平行(共面)。
21.其中,(至少近似平行于拾取工具的中心纵轴定向的)组件的侧缘在组件的翻转或运输路径上沿翻转装置的圆周从拾取位置直至放下位置或直至弹出位置处于组件的邻接该侧缘的两个侧面前方。通过组件的侧面与翻转平面的成角度的布局,便能对侧面进行检查,而不需要在组件的翻转平面和运输路径中设置形式为检查装置或对准装置的(临时)干扰轮廓。
22.此方案不同于具有例如两个互成直角的翻转装置的已知配置,其中将组件从一翻转装置朝另一翻转装置转移,并且在该过程中将组件相对其前面或底面翻转。在该已知配置中,同样对俯视图呈四边形的组件的所有侧面进行检查。由于设有两个翻转装置,在此提供两个翻转平面。在每个翻转平面内,在不设置干扰轮廓的情况下每次仅能对两个相对侧面进行检查,因为组件的两个侧面与相应的翻转平面对准,且组件的两个侧面与相应的翻转平面成直角。
23.拾取工具被配置及设计为,拾取具有四个待进行光学检查的侧面的组件。在一个变型中,沿组件的沿翻转装置圆周的运输路径布置有两对光学组件检查装置,这些组件检查装置以其光轴成角度布置的方式布置在组件的沿翻转装置的圆周的运输路径的外部。其中,组件的运输路径大体呈圆弧段形(例如从拾取位置(0
°
)直至放下位置(180
°
)的半圆形,或可选地直至弹出位置(例如240
°
或270
°
)的四分三的圆形)。
24.在本文所提出的装置中,这些(例如两个)成像装置及其(例如两个)照明装置(在组件具有四个待检查侧面的情况下)可以呈x布局分布在翻转装置上的同一翻转平面内的(例如两个)分开的检查位置上。此点会缩短处理时间(并增大处理量)。在该变型中,采用透射光照明装置。
25.在x布局的另一个变型中,在单独一个检查位置上,四个成像装置指向组件的四个待检查侧面,且成像装置分别关联有照明装置,这些照明装置以一个光谱或多个光谱对相应的待检查侧面进行照明。
26.所提出的装置特别是同样有利于用与成像装置相对布置的红外线(ir)照明进行红外线透射光检查。该配置实现周期的缩短,因为仅在定向位置上需要组件沿拾取工具的径向相对翻转装置的旋转轴的径向(z)冲程来使得拾取工具上的组件对准居中的位置。该径向(z)冲程可与处于翻转装置上的其它组件的径向(z)冲程例如在拾取位置和/或放下位置上同时实施,因为在该时间内,翻转装置无论如何都为至少短暂静止的或近似静止的。
27.本文提出的装置节约空间且降低难度,因为其仅需一个翻转装置来检查组件的侧面以及使得组件翻转。本文提出的装置适用于边长为例如0.3mm至例如12
×
12
×
2.5mm的组件尺寸。因此,相较于已知装置,本文提出的装置可处理和/或检查各种不同大小的组件。
28.可选的弹出位置用于例如用抽吸机将被检查为出现故障的组件从工艺移除。
29.可选的定向位置用于,在组件未被以检查所需的精度送至拾取工具上的情况下,用相应的滑块或抓持器对组件在拾取工具上的位置及定向进行校正。为此,用于对准组件的装置被设计及配置为,使得该组件在至少一个轴线方向及旋转方向上相对拾取工具的中
心对准。在该装置中,可将组件以侧面相对翻转平面成角度的定向从拾取位置输送至放下位置,而组件沿翻转装置圆周的翻转或运输路径免受/不受光学组件检查装置的元器件的影响。
30.在该装置的一个变型中,替代或补充地,两个成像装置及其照明装置作为光学组件检查装置在每个检查位置上如此地呈x布局分布,从而用第一照明装置及第一成像装置对组件的第一侧面进行检查,用第二照明装置及第二成像装置对与第一侧面相邻的第二侧面进行检查。其中,这两个成像装置的光路(光束路径)可在将拾取工具上的组件定位在检查位置上的点处以x形交叉或相交。
31.在该装置的一个变型中,替代或补充地,该拾取工具被配置及设计为,拾取具有四个待进行光学检查的侧面的组件。沿组件的运输路径布置有两对光学组件检查装置,这些组件检查装置成角度布置在该组件沿翻转装置圆周的运输路径的外部,其中该运输路径大体呈圆弧段形。
32.在该装置的一个变型中,替代或补充地,成像装置分别分配有与其相对布置的红外线(ir)照明装置作为用于红外线透射光检查的照明装置,其中当带有组件的拾取工具处于相应成像装置的检查区域内时,每个照明装置都通过控制装置激活,或者这些照明装置被永久性激活。
33.在该装置的一个变型中,替代或补充地,该定向位置用于,对该组件在拾取工具上的位置及定向进行校正,其中设有用于对准组件的装置,其被设计及配置为,使得该组件在至少一个与运输路径成角度的定向上以和/或在相对拾取工具和/或组件的中心纵轴的旋转方向上,相对拾取工具的中心对准。
34.在该装置的一个变型中,替代或补充地,该用于对准的装置具有两个可相互靠近及相互远离移动的滑块,这些滑块具有相对定向的滑动区段,这些滑动区段被设计及配置为,至少部分地与位于接收工具上的组件的两个相互相对的第一侧或侧面接触以将组件对准。
35.在该装置的一个变型中,替代或补充地,这些滑块被设计及配置为,在拾取工具保持组件期间,在相对这两个滑动区段中的至少一个定向的方向上朝向检查位置滑动或旋转组件。
36.在该装置的一个变型中,该装置具有以相等的角距沿翻转装置的圆周布置的8个、16个、24个、32个、48个或以上的拾取工具,该翻转装置具有圆(环)形或星形的外形。迄今为止,该装置的具有24个拾取工具的方案被证明在大小、各位置的可接近性及速度方面较为有利。
37.在该装置的一个变型中,在从处于保持及进料装置中的组件储库拾取组件的拾取位置上、在用于在拾取工具上居中及对准组件的定向位置上,和/或在用于放下组件的放下位置上,各设有冲程装置来引起拾取工具的径向(z)冲程,该冲程在径向上从翻转装置的旋转轴朝向处于保持及进料装置中的用于拾取组件的组件储库,朝向用于居中及对准组件的装置,和/或朝向用于放下组件的接收装置。
38.在该装置的一个变型中,替代或补充地,该冲程装置在相应的位置上具有用于径向(z)冲程的伺服马达或凸轮/拨块配置,以使得拾取工具以受控的方式在拾取工具的纵向方向上移动。
39.在该装置的一个变型中,该翻转装置通过线性驱动器沿翻转装置的翻转轴以受控的方式移动,以便在拾取工具上位置精确地从组件储库接收组件,以和/或在放下位置上位置精确地放下组件。
40.一种处理具有多个侧面和/或侧面边缘的组件的方法,具有如下步骤:在用于组件储库的保持及进料装置中提供组件储库,使得所述组件储库朝向拾取位置;通过卸料装置每次将这些组件中的一个从处于保持及进料装置中的组件储库朝处于拾取位置上的相应拾取工具方向输送或输送至所述拾取工具;通过至少一个布置在翻转装置上的拾取工具在组件的顶面上拾取组件中的一个;使得所述拾取工具在翻转平面内围绕翻转轴旋转;将处于拾取工具上的组件从拾取位置可选地输送至一个或多个定向位置、可选地输送至一个或多个检查位置、输送至放下位置及可选地输送至弹出位置;如此地将保持及进料装置中的组件储库对准,使得至少所述待释放的组件相对处于拾取位置上的拾取工具对准,组件的与翻转平面成锐角的侧面与所述翻转平面成约30
°
至约60
°
的角,或者,组件的与翻转平面成钝角的侧面与所述翻转平面成约120
°
至约150
°
的角。
41.随后,可在检查位置上对组件的前述这些侧面进行光学检查,以和/或在定向位置上将其对准。在另一变型中,用于对具有至少一个顶面、多个待检查侧面和/或侧面边缘的组件进行检查的装置具有至少一个布置在翻转装置上的在每种情况下用于组件中的一个的拾取工具。拾取工具被设计及配置为,在相应组件的顶面上拾取该组件。翻转装置被设计及配置为,用拾取工具将组件在翻转平面内沿运输路径围绕翻转轴旋转,并且在此过程中将处于拾取工具上的与翻转路径或翻转平面成角度的组件输送至检查位置。在检查位置上,作为光学组件检查装置的第一及第二成像装置如此地互成角度布置,使得处于检查位置上的组件的第一侧面或边缘用第一成像装置检查,处于检查位置上的组件的与第一侧面或边缘相邻的第二侧面或边缘用第二成像装置检查。
42.在该装置的一个变型中,替代或补充地,沿组件的运输路径布置有两对光学组件检查装置。这些组件检查装置以成角度的方式布置在该组件沿翻转装置圆周的运输路径的外部,其中该组件的运输路径大体呈圆弧段形。在该装置的一个变型中,替代或补充地,成像装置分别分配有与其相对布置的红外线(ir)照明装置作为用于红外线透射光检查的照明装置。当带有组件的拾取工具处于相应成像装置的检查区域内时,每个照明装置都通过控制装置激活,或者这些照明装置被永久性激活。
43.在该装置的一个变型中,替代或补充地,在两个检查位置上各有两个形式为成像传感器及其照明装置的光学组件检查装置,其以其光路为x布局的方式布置,使得第一照明装置指向第一成像装置,第二照明装置指向第二成像装置。拾取工具被配置及设计为,将组件输送至光路交叉或相交的区域。
44.在该装置的一个变型中,替代或补充地,在组件处于相应位置上的情况下,在检查位置中的每个上都各有两个邻接的侧面,换言之,各有两个相互不平行的侧面同时受到光学检查,而成像装置和/或其照明装置不需要进入组件的运输路径,或者拾取工具上的组件不需要径向朝外或朝内移动以进入成像装置及其照明装置的光路。
45.在该装置的一个变型中,替代或补充地,翻转装置上的拾取工具被配置及设计为,拾取组件,并以组件的待进行光学检查的侧面沿组件的运输路径穿过至少一对或两对光学组件检查装置的方式运输组件,这些光学组件检查装置被配置及设计为,分别对相邻的两
个侧面进行检查。
46.在该装置的一个变型中,替代或补充地,该组件可用透射光和/或用入射光检查,具体方式为,成像装置分别对应红外线(ir)透射光或入射光照明装置作为照明装置,这些照明装置分别定向在某个点上,在该点处组件的待检查侧面处于相应的检查位置。
47.在该装置的一个变型中,替代或补充地,沿与运输路径成角度的定向地输送该组件,其中在检查位置上分别设有两个成像装置及其照明装置,其分别分配有用于光路的偏转装置。
48.在该装置的一个变型中,替代或补充地,通过相应的线性驱动器将成像装置、其照明装置和/或偏转装置移入组件的运输路径以及从组件的运输路径移出。
49.在该装置的一个变型中,替代或补充地,该偏转装置设计为完全或部分地偏转/反射,并且在完全回缩进组件的运输路径的位置上进入(两个相邻的拾取工具之间的)待检查组件的径向下方。
50.在该装置的一个变型中,替代或补充地,针对用于检查组件的侧面或边缘的反射光成像装置,在组件的侧面或边缘的成像装置一侧设有照明装置。
51.在该装置的一个变型中,替代或补充地,针对用于检查组件的远离拾取工具的端面以和/或检查组件在拾取工具上的位置/定向的入射光成像装置,布置有成像装置及其(视情况具有不同波长的)照明装置,以及对从成像装置至组件的端面的光路部分透明的偏转装置,以和/或包围该偏转装置的其他照明装置。该配置用于对组件在拾取工具上的位置/定向进行检查。在该装置的一个变型中,替代或补充地,通过相应的线性驱动器相对组件移动成像装置、照明装置,视情况也可移动偏转装置。
52.在一个变型中,替代或补充地,该装置配设有两个可相互靠近及相互远离移动的滑块,这些滑块例如具有相互平行定向的滑动区段。这两个滑动区段被设计及配置为,至少部分地与位于拾取工具上的组件的两个例如彼此相对的第一侧面接触,以便对准组件。
53.在一个变型中,替代或补充地,这些滑块被设计及配置为,在拾取工具(例如通过负压)保持组件期间,在例如垂直于这两个滑动区段中的至少一个的方向上将组件朝向检查位置推动和/或旋转。替代或补充地,在可选的一个或多个连续的定向位置上,在每种情况下为第一装置设置类似的装置用于对准组件,以便在另外的轴线方向和/或旋转方向上对准组件。
54.在一个变型中,在此所提出的装置具有以相等的角距沿圆环形或星形的翻转装置的圆周布置的8个、16个、24个、32个、36个、48个或以上的拾取工具。
55.根据空间条件及对应于该装置的各元器件的尺寸(翻转装置的直径、拾取工具、用于对准的装置、成像装置等),例如在具有24个拾取工具的变型中,沿翻转装置圆周在第1位置(0
°
)上设有从基板拾取组件的拾取位置,在第2位置(45
°
)上设有用于在拾取工具上居中及对准组件的定向位置,在第3位置(60
°
)上设有用于对组件在拾取工具上的居中及对准进行检验的检查位置,在第4位置(90
°
)上设有用于对组件的两个(例如相邻的)侧面进行光学检查的检查位置,在第5位置(105
°
)上设有用于对组件的其他两个(例如相邻的)侧面进行光学检查的
检查位置,在第6位置(180
°
)上设有用于将组件放入容器或另一基板的放下位置,以及在第7位置(240
°
)上设有用于将组件从工艺移除的弹出位置。沿翻转装置圆周的角度说明仅为示例。
56.在从基板拾取组件的拾取位置、用于在拾取工具上居中及对准组件的定向位置以及用于放下组件的放下位置上分别引起拾取工具的径向(z)冲程,该冲程朝向用于拾取组件的基板、朝向用于居中及对准组件的装置,或朝向用于放下组件的接收装置。
57.在用于进行光学检查的检查位置上,拾取工具上的组件保持在相应的径向非工作位置上,即,未随着拾取工具的径向(z)冲程径向地离开翻转装置的旋转轴。在这种类型的装置中,在一个变型中,设有分配给翻转装置的拾取工具的线性驱动器。
58.这些线性驱动器分别从翻转装置外部与相应地定位的拾取工具接合,并且将相应的拾取工具径向地伸出及回缩。在另一个变型中,这些线性驱动器仅将相应的拾取工具伸出,而复位弹簧将相应的拾取工具回缩。在另一个变型中,拾取工具中的每个都分配有双向或单向的径向驱动器。
59.在此,通过将组件推动及旋转至检查位置来进行对准是指,滑动区段在拾取工具上移动组件,使得组件在下一检查中尽可能处于相应的相机配置的景深范围内。组件不需要在这两个方向(x轴及y轴)及(围绕z轴的)旋转方向上精确对准。组件以其在相应的检查中被观察的侧面及顶面尽可能垂直于相应相机配置的光轴定向并且在相应相机配置的视场内完全对准即可。
60.在一个变型中,第一和/或该第二滑块各具一个驱动器,以改变相应滑动区段与相应翻转装置的拾取工具在径向上相对于翻转轴的距离。因此,每个滑块都具一个自有驱动器,以改变相应滑动区段沿拾取工具的相应纵向中心轴方向与相应拾取工具的顶面的距离。如此,便能对相应滑动区段接合于组件侧面并且相接触的地点进行调节。
61.在另一个变型中,替代或补充地,在翻转装置上共同作用的滑块被配置及设计为,沿同一方向且至少近似同步地朝组件的相应检查位置运动或离开相应检查位置。以该方式将组件推动及旋转至相应检查位置。
62.一种对具有至少一顶面、多个待检查侧面和/或侧面边缘的组件进行检查的方法,包括如下步骤:提供布置在翻转装置上的各用于组件中的一个的拾取工具;通过拾取工具以与翻转路径或翻转平面成角度的定向在组件的顶面上拾取组件,以将该组件输送至检查位置;旋转翻转装置以及拾取工具,以将该组件在翻转平面内沿翻转路径输送至检查位置;在检查位置上提供互成角度(且与翻转平面成角度)地布置的第一及第二成像装置作为光学组件检查装置;用第一成像装置检查处于检查位置的组件的第一侧面或边缘;用第二成像装置检查处于检查位置上的组件的与第一侧面或边缘相邻的第二侧面或边缘。
63.因此,在此提出的配置形成一个集成处理/检查装置。成像传感器对组件的所有或几乎所有顶面和/或侧面进行检查,并且提供用于拾取工具(机械臂、拾取工具)及接收点的定位的相关数据。
64.因此,该装置构成具有必要的工艺技术外围设备的密闭机器系统的核心,例如用于(例如在晶圆基板上)提供组件以及(例如在槽带或载带中的)提供组件放置处。
65.本文提出的组件处理装置用例如位置固定的卸料装置(弹出单元)从例如水平地
布置在组件处理装置的上方区域内的组件储库(晶圆盘)接收组件。组件储库在该平面内相对该弹出单元运动。弹出单元通过针或以非接触的方式起作用,从而将组件一个个地从组件储库释放并通过拾取工具拾取。可将被弹出的组件依次输送至多个检查步骤,最后在放下位置上将其放下。术语:接收点、放下位置及(放置)槽在此同义使用。其中,可将识别出的不良件剔除。整合至输送过程的组件光学检查分为多个检查步骤。该检查利用一个或多个形式为相机配置的成像传感器来对组件的顶面和/或侧面以及拾取工具在接收点上的位置进行光学检查。这些成像传感器被配置为,在多个检查步骤中分别采集组件的顶面和/或侧面的至少一个图像。在翻转装置的拾取工具分别保持住一个组件的情况下输送/运输组件。所保持的组件在运输期间穿过各检查步骤。其中,成像传感器捕获的(图像)数据同样用于对机械臂(拾取工具)及接收点的位置调节进行协调。组件输送被配置为,大体连续地或周期性地沿组件的路径输送组件。
66.在一个变型中,将组件从水平的组件储库输送至水平的放置处。也可以互成角度的方式设置组件储库及放置处,也即,例如设置水平的组件储库及垂直的放置处。
67.此外,在该装置的一个变型中,受控地沿不同的(x向、y向、旋转角)方向电动或手动移动用于组件储库及放下位置的保持及进料装置,即例如具有载槽的皮带或托盘。如此便能将相应组件以期望的定向及位置送至拾取工具或输送至放下位置。
68.在此提出的配置及方法在功能上兼有两个方面:处理及检查。这两个功能可以在时间和空间上交织在一起,以便在快速且精确地对组件的多个(至多六个或六个以上的)侧面进行定性评估,同时将这些组件单个地从组件储库快速移出并在通过检查将其分类为合格件后精确地放在接收点上。该装置具有例如呈星形或轮状的可调节翻转装置。在一个变型中,该装置具有多角形(多边形)的外形。该翻转装置载有在若干变型中同样可相对翻转装置的旋转轴径向移动的多个拾取工具,以分别将组件以固设在拾取工具上的方式在组件拾取与出料之间的旋转角度内输送至一个或多个用于定位、检查、不良件剔除的处理工位,视情况也输送至其他工位。
69.在此提出的装置中,星形或轮状翻转装置在径向朝外的拾取工具上载有组件,这些拾取工具布置在翻转装置的假想圆周上。这与翻转装置的拾取工具平行于翻转装置的旋转轴定向的装置不同。
70.根据翻转装置的拾取工具的数目,在翻转装置上可同时保持多个组件,因此,各检查步骤同样可在不同组件上同时进行。
71.在各检查步骤中通过成像传感器检查到的组件(上/下)顶面和/或(横向)侧面可为组件的不同顶面和/或侧面。
72.根据光学检查的一个方面,组件的组件输送走完组件路径,而在各位置上的停顿时间极短。其中,在运动期间或在最短停顿时间内,用成像装置对组件的一个或多个顶面和/或侧面进行检查。随后,用图像处理的方法对这些图像进行评估。
73.根据该光学检查/检查的一个变型,设有一个或多个彩色成像传感器或黑白成像传感器作为成像装置,其中在一个变型中,传感器及光学元器件针对某些光波长范围,例如针对红外光或白光或uv光经过优化。
74.成像传感器可具有一个或多个反射镜、光学棱镜、透镜或此类光学元器件。成像传感器可分配有辐射源或光源。其中,每个辐射源或光源都被配置为,发出具有不同光谱范围
或波长范围的光/辐射以对组件的至少部分进行照明。这些波长范围可至少部分地有所偏差、相互重叠或相一致。因此,第一光源的光例如可为红色,第二光源的光例如可为蓝色。但也可选择反向的对应关系或其他波长对(例如红外光及可见光)。
75.可在具有组件的拾取工具处于相应检查范围内的瞬间通过控制装置短暂地接通光源,从而使得组件的顶面和/或侧面在短暂的闪光下曝光,以通过相应的成像传感器进行检查。替代地,可应用永久性照明。
76.在一个变型中,该装置分配有出料装置,其被配置为,每次将一个组件从结构化的组件储库释放至翻转装置的通过控制装置相应地定位的拾取工具上。该出料装置可为组件弹出器,其用针将组件穿过晶圆载膜弹出,或为激光脉冲发生器,其针对性地减小组件在载膜上的附着力,使得组件与载膜分离。出料装置分配有作为成像装置的位置和/或特性传感器,其被配置为,对出料装置相对待释放组件的位置和/或待释放组件的位置数据,以和/或者待释放组件的特性进行检查,并将其用于对该出料装置的操纵进行控制。
77.在一个变型中,采用该装置时,翻转装置的拾取工具被配置为,径向相对翻转装置的旋转轴或旋转中心受控地伸出及回缩,和/或,受控地施加有负压和/或过压以接收或释放待输送组件,和/或,围绕其相应的径向运动轴不可动,或围绕其相应的径向运动轴受控地以某个旋转角度旋转。
78.在该装置的一个变型中,阀门为拾取工具中的每个提供单独的且位置适宜的负压及过压进线,以便以自由或位置可控的方式实现如下功能:(i)吸入该组件,(ii)在处理期间,特别是在拾取工具上居中及对准组件时以及随后的检查中将该组件保持在翻转装置上,(iii)用或不用可控的吹气脉冲放置组件,和/或将组件自由吹落。
79.在该装置的一个变型中,翻转装置在拾取位置与放置点之间分配有形式为光学成像检查装置的位置及特性传感器。这些传感器被配置为,对所输送组件的位置数据和/或特性以和/或者用于拾取工具及放置点的位置调节的位置数据进行检查,并将其用于进行控制。
80.在该装置的一个变型中,位置及特性传感器中的至少一些被配置为,对所输送组件的至少一个顶面和/或一个或多个侧面进行检查,以记录其位置数据和/或特性并使它们可用于控制系统。在该组件处理装置的一个变型中,翻转装置分配有整数的n个拾取工具。其中n》=2。
81.在该装置的一个变型中,位置/特性传感器为具有相一致或互不相同的检查光谱的成像传感器,或者接触式或非接触式地进行测距的位置传感器,或者接触式或非接触式地进行检查的特性传感器。
82.位置及特性传感器可为成像传感器,其具有直线光轴或者通过光学透镜、反射镜、棱镜或光栅折弯的光轴。
83.位置及特性传感器的成像传感器系统及其反射镜与照明单元通过其空间布局而可如此地组合,使得两个侧面的组件检查可并行地在单独一个工艺处理位置上实现。因此,在翻转装置上总共设置两个用于对例如正方形组件的四个侧面进行完整检查的工艺处理位置即可。可在翻转装置上的第三工艺处理位置上对组件的远离拾取工具的顶面进行检查;可用另一成像传感器对组件在接收点中的正确位置进行检查。
84.相较于现有技术,在此提出的方案成本更加低廉,并且提供更大的组件处理量、更
多的检查时间以及更小的运动质量。
附图说明
85.下面结合附图对更多特征、特性、优点及对本领域技术人员而言可能的变体进行详细说明。其中,附图示意性地示出用于组件的光学检查装置,图1示出用于处理组件的装置的侧视示意图,通过翻转装置将该组件从拾取位置输送至放下位置。图1a、1b示出(电子)组件,其具有棱柱形的且在俯视图中呈四边形、正方形的外形,包含四个侧面以及下顶面和上顶面。图2示出在翻转装置上,多个拾取工具是如何在翻转平面内围绕翻转轴旋转的,以及在此过程中如何将处于相应拾取工具上的组件从拾取位置输送至一个或多个定向位置、一个或多个检查位置、放下位置及弹出位置。图3示出该组件相对翻转平面的角度定向的三个变型。图4示出拾取工具是如何拾取组件,并如何以其待进行光学检查的侧面沿组件的运输路径穿过两对光学组件检查装置的方式输送所述组件。图4a示出拾取工具上的具有四个待光学检查的侧面的组件是如何在单个检查位置上受到两对光学组件检查装置的检查。图5示出用于以两个v形滑块进行校准的装置,将这些滑块从外部横向地送至组件c的两个相对的角上。然后滑块移动到相对角。图6示出如何沿与运输路径成角度的定向将该组件从拾取位置输送至放下位置的,以及在这两个检查位置上各设有两个成像装置及其照明装置。图7示出如何使用反射光图像来检查组件的端面以及它在拾取工具上的位置/定向。图8示出设在组件的拾取位置、定向位置及放下位置上的冲程装置。
具体实施方式
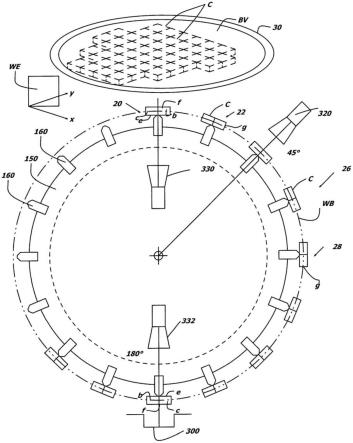
86.图1示出组件处理装置100,其用于将形式为电子半导体芯片的棱柱形组件c从组件储库bv移出并将它们放置在接收装置300上,该接收装置例如可构建为槽带或载带、(薄膜)基板或构建为具有布置成多个行及列的(放置)槽的托盘。本文提出的组件处理装置100在拾取位置20上从水平地布置在组件处理装置100的上方区域内的组件储库bv接收组件c,该组件储库在此形式为晶圆盘,其被容置在朝向拾取位置20的保持及进料装置30中。
87.在所示变型中(同样参见图1a、图1b),组件c为电子组件,具有棱柱形的且在俯视图中呈四边形的外形,具有组件c的四个侧面a、b、c、d以及上、下顶面e、f。组件c的上下顶面e、f呈棱柱形。
88.组件处理装置100具有形式为翻转轮的翻转装置150。在翻转装置150的径向外边缘区域处,多个(在所示变型中为16个,但也可为8、24、32或其他数目的)拾取工具160以相等的角距沿翻转装置150的圆周布置,该翻转装置具有圆环形或星形。
89.拾取工具160中的每个都用于,在拾取位置20上从组件储库bv以组件的顶面e拾取一个组件c。翻转装置150具有马达驱动器170,用于使得翻转装置150在翻转平面we内围绕
翻转轴wa旋转。其中,翻转平面与供拾取工具160旋转的平面重合。翻转轴wa与轮状翻转装置150的中心轴重合。在所示变型中,在旋转期间将处于拾取工具160上的组件c从拾取位置20输送至一个或多个(在此为一个)定向位置22、24、输送至一个或多个检查位置26、28、输送至放下位置32以及可选地输送至弹出位置34。
90.为此,拾取工具160径向朝外地布置在星形或轮状翻转装置150的(假想)圆周上并载有组件c。在所示的变型中,拾取工具160可在径向上相对翻转装置150的翻转轴wa移动。因此,这些拾取工具160在枢转角度内(在此介于0
°
与180
°
)在拾取位置20与放下位置32(或直至弹出位置34)之间枢转并且输送各自固定至拾取工具160中的一个的组件。
91.在所示变型中,卸料装置180包括受控制装置控制的针,或者该卸料装置例如以非接触的方式用激光束来将组件c一个个地从组件储库bv释放以供应至翻转装置150。每个拾取工具160被配置为,当其在翻转装置150的0
°
位置上最接近卸料装置180时,在拾取位置20上从组件储库bv接收组件。因此,卸料装置180每次将组件c中的一个从位于保持及进料装置30中的组件储库bv输送至处于拾取位置20上的相应拾取工具160。
92.保持及进料装置30如此地以可围绕其中心纵轴旋转的方式安装,使得从组件储库bv中待释放的组件c如此地相对处于拾取位置20上的拾取工具160对齐,使得组件c的与翻转平面we成锐角的待进行光学检查的侧面a、b、c、d与该翻转平面we成约30
°
至约60
°
的角alpha,或者组件c的与翻转平面we成钝角的待进行光学检查的侧面与该翻转平面we成约120
°
至约150
°
的角beta。图3示出上述情形,该图标出组件c以给定的角度范围相对于翻转平面we的位置的三个变型。
93.换言之,组件c的基本上垂直于组件c的顶面或底面定向的侧缘g,在组件c的沿翻转装置150的圆周从拾取位置20直至放下位置32(或直至弹出位置34)的翻转或运输路径wb上处于组件c的邻接侧缘g的两个侧面a、b前方。这在图2中示出。
94.这确保了组件c的待进行光学检查的侧面并非处于沿翻转装置150的圆周横向于翻转平面we的定向上。因此,便能对组件c的待检查侧面进行检查,而成像装置及其照明装置不需要进入组件c的翻转路径wb或运输路径,或者拾取工具160上的组件c不需要径向朝外或朝内移动以进入成像装置及其照明装置的光路。然而,在(单独)一个翻转装置150上的组件c的从拾取位置20至放下位置32的运输路径上,(例如在组件c具有四个侧面的情形下)可对全部四个侧面进行检查。这无法用迄今为止的已知装置实现,这些装置需要两个彼此正交的翻转装置,其中将组件从一个翻转装置输送至另一翻转装置。
95.为将组件c吸入拾取工具160、为将组件c保持在拾取工具160上、为用或不用可控的吹气脉冲放置组件c、以及为将组件c从拾取工具160自由吹出,拾取工具160与未进一步示出的气动单元连接。在控制装置的控制下,气动单元以阀门控制的方式在必要的相应时间点上或时间段内对各拾取工具160施加正压或负压,以分别拾取、保持并释放组件c。
96.图1示出(45
°
处的)成像装置320,其可用来在将组件c输送至检查位置26、28前对组件c在拾取工具160上的位置/定向进行检查并在控制装置中进行评估。图1还示出(180
°
处的)成像装置332,其可用来检查组件c在接收装置300中的位置/定向并在控制装置中进行评估,以及成像装置,其可用来检查组件c在接收位置上的位置/定向并在控制装置中进行评估。
97.在此所示的变型中,组件c以侧面a、b、c、d相对翻转平面we成约45
°
或135
°
(
±
约
30
°
)的角度定向从拾取位置被输送至放下位置32。其中,组件c沿翻转装置150圆周的翻转或运输路径wb免受/不受光学组件检查装置的元器件的影响。
98.图4示出的是形式为高清晰度(在一个变型中为400万-1200万像素)成像传感器的两个光学组件检查装置302a、302b、304a、304b及其照明装置306a、306b、308a、308b(在一个变型中为红外发光二极管配置)如何呈x布局布置以在两个连续的检查位置26、28的每一个处进行透射光检查。其中,在第一检查位置26上,第一照明装置306a指向第一成像装置304a,第二照明装置308a指向第二成像装置302a。在第二检查位置28上,第二照明装置306b指向第一成像装置304b,第二照明装置308b指向第二成像装置302b。
99.因此,在组件c处于相应位置上的情况下,在两个连续的检查位置中的每个上都各有两个侧面同时受到光学检查,而成像装置及其照明装置不需要进入组件c的运输路径,或者拾取工具160上的组件c不需要径向朝外或朝内移动以进入成像装置及其照明装置的光路。
100.图4特别示出了拾取工具160如何在翻转装置150上拾取组件c以及如何以四个待进行光学检查的侧面a、b、c、d沿组件c的运输路径wb沿翻转装置150的圆周穿过上述两对光学组件检查装置的方式输送组件c。这些光学组件检查装置以成角度布置的方式布置在组件c的沿翻转装置150的圆周的大体呈圆弧段形的运输路径wb的外部。成像装置302a、304a、302b、304b及其照明装置306a、308a、306b、308b对中的一对分别布置在各检查位置26、28上,并且分别对相邻接的两个侧面a、b、c、d进行检查。
101.因此,在第一检查位置26上第一对成像装置302a、304a及其照明装置306a、308a在透射光下对组件c的相邻接的侧面d及a进行检查,且在第二检查位置28上第二对成像装置302b、304b及其照明装置306b、308b在透射光下对组件c的相邻接的侧面c及b进行检查。
102.在该装置的一个变型中,为进一步缩短周期,第一对成像装置302a、304a及第二对成像装置302b、304b可分别对应单独的图像数据处理装置,该图像数据处理装置用于评估采集到的组件c的侧面的图像数据,这些图像数据处理装置可与中央机器控制装置连接。
103.在所示变型中,在(具有红外光的)透射光下对组件c进行检查。其中,作为附加或替代方案,还可采用用反射光进行检查的配置,其中照明装置306、308例如环形地包围成像装置302、304或者设计为发射两个不同波长的阵列(led),并且定向在一个位置上,在该位置处待检查的侧面a、b、c、d处于相应的检查位置26、28。
104.在此,光学组件检查装置对分别布置在由图4中的两条线k限定的通道外部的边缘上。
105.因此,红外(ir)和/或反射光照明装置306、308与成像装置302、304中的每一个相关联,作为用于红外透射光检查和/或反射光检查的照明装置。每个照明装置306、308都通过控制装置激活,当带有组件c的拾取工具160处于相应成像装置302、304的检查区域内时,控制装置也会同步成像装置302、304所进行的图像采集。在另一个变型中,照明装置306、308被永久地激活。
106.在一个变型中,在对组件c进行光学检查前,在一个或多个定向位置22、24上对组件c在拾取工具160上的位置及定向进行校正,或与随后的检查适当地定向。在图4所示变型中,用于定向组件c的装置400用于将组件c相对拾取工具160的中心,在此即拾取工具160的吸管162的中心纵轴如此定向,即沿与运输路径wb成角度地定向,在所示变型中即成45
°
,或
者沿相对拾取工具160的中心纵轴的旋转方向定向。为此,在图4所示变型中,用于对准的装置400布置在分别与运输路径wb成角度的(约45
°
或135
°±
约30
°
)组件c的这两个定向位置22、24上,这些装置分别具有两个可相互靠近及相互远离移动的滑块402、404。滑块402、404中的每个都具有一个朝向另一个滑动区段定向的滑动区段406、408,以便当滑块402、404闭合时,与处于拾取工具160上的组件c的两个相对的侧面接触。由此,组件c被对准以便进行检查。
107.若组件c在两个定向位置22、24上对准,则成像装置和/或其照明装置在随后的这两个检查位置上的聚焦难度有所降低。在另一个变型中,仅在一方向上与运输路径wb成角度地对准组件c,随后通过在径向上处于外部的成像装置320对组件c相对拾取工具160或其吸管162的位置进行检查,可选地也对组件c的远离拾取工具的顶面的特性进行检查,并且确定成像装置302、304和/或其照明装置306、308在随后的检查位置26、28上的聚焦路径。
108.随后,基于所确定的这些聚焦路径,通过控制装置在随后的检查位置中的一个上或在随后的这两个检查位置上移动成像装置302、304和/或其照明装置,以便在组件c到达相应的检查位置26、28之前/之时/期间/之后进行聚焦。在另一未进一步示出的变型中,不设有任何供组件c对准的定向位置。确切而言,直接通过在径向上处于外部的成像装置320对从组件储库bv接收的组件c的可能具有几度及若干1/100毫米直至数毫米扭曲的位置进行检查,并且由此相应地确定成像装置302、304和/或其照明装置306、308在随后的这两个检查位置26、28上的聚焦路径。随后,通过控制装置移动成像装置和/或其照明装置,以便在组件c到达相应的检查位置26、28之前/之时/期间/之后进行聚焦。
109.若存在至少一个用两个可相互靠近及相互远离移动的滑块402、404进行对准的装置400,则滑块402、404用于在拾取工具160保持住组件c期间,在朝向两个滑动区段406、408中的至少一个定向的方向上朝着检查位置推动/旋转组件c。
110.图4a呈x布局的另一个变型示出,在单独一个检查位置26上,四个成像装置302a、304a、302b、304b是如何对准同一组件c的四个待检查侧面a、b、c、d的。成像装置302a、304a、302b、304b分别关联有照明装置306a、306a、308b、308b,这些照明装置以一个光谱或多个不同的光谱用入射光对组件c的相应待检查侧面a、b、c、d进行照明。如此便能通过相应的成像装置302a、304a、302b、304b对相应的侧面进行图像采集。
111.图5示出一个变型,其中两个大体呈v形的滑块410、412从由两条线k限定的通道外部侧向地进给至例如呈四边形的组件c的两个相对的角上。其中,将组件c平行于滑块410、412的支腿地且相对拾取工具160的吸管162居中地对准。
112.图6示出一个变型,其中将组件c(其朝向运输路径wb的侧面例如与该运输路径wb成约45
°±
约30
°
的角度)以与运输路径wb成角度的定向从组件c的拾取位置输送至组件c的放下位置32,且在这两个检查位置26、28上分别设有两个成像装置600及其照明装置610(为清楚起见,图6仅示出其中的一个)。成像装置600及其照明装置610分别分配用于在此形式为反射镜的用于光路的偏转装置440、450,其将由控制装置借助于相应的线性驱动器420、430移入或移出组件c的运输路径wb。因此,该反射镜或棱镜完全或部分地偏转/反射,并且在完全插入组件c的运输路径wb的位置上,在两个相邻拾取工具160之间、组件c的下方径向延伸。照明装置610视情况还可分别分配一个聚光透镜680。图6所示变型允许通过红外光检查组件c的侧面的透射光图像。对于用于检查组件c的侧面的反射光图像,作为照明装置610
的替代或作为对照明装置610的补充,在组件c的远离成像装置的一侧上设有照明装置,其例如形式为环绕透镜或其光路的照明环,该照明装置指向组件c的待检查侧面或边缘。因此,在一个变型中,可用可见光,例如蓝光来对侧面进行照明,该光在侧面上反射并被成像装置检查到。
113.图7所示变型允许反射光成像,以对组件c的远离拾取工具160的吸管162的前面f以及组件c在拾取工具160的吸管162上的位置/定向进行检查。在该变型中,成像装置700具有使用不同波长(在此为红外线、红、蓝)的照明装置710、720、730,以及形式为反射镜750的偏转装置740,其对于来自用于从成像装置700到组件c的前面f的光路的照明装置710的照明光是部分透明的。在照明装置710仅提供可见波长的光且可作为照明环围绕偏转装置740布置的情况下,可选地设置其他照明装置720、730。在一个变型中,通过控制装置借助于相应的线性驱动器760、770、780相对组件c移动成像装置700、照明装置710、720、730,视情况也可移动偏转装置740。
114.如有必要,在一个变型中(同样参见图8),在下列位置的一个或多个上,即在从处于保持及进料装置30中的组件储库bv拾取组件c的拾取位置20上、在用于在拾取工具160上居中及对准组件c的定向位置22上,以及在用于放下组件c的放下位置32上,设有冲程装置900。该冲程装置900用于分别执行拾取工具160的径向(z)冲程,该冲程在径向上从翻转装置的旋转轴da朝向处于保持及进料装置30中的用于拾取组件c的组件储库bv,朝向用于居中及对准组件(c)的装置,和/或朝向组件c的接收点32。在所示变型中,用于径向(z)冲程的冲程装置900在相应的位置上具有凸轮/拨块配置910、920,以使得拾取工具160以受控的方式沿拾取工具160的纵向方向径向朝外地移动。拾取工具160的回返运动通过未进一步示出的弹簧配置实现。作为替代方案,也可分别设置伺服马达。其中,如此地确定升降运动的大小,从而使得拾取工具160上的组件c升降离开其他运输路径wb。用于凸轮/拨块配置910、920的旋转驱动器使得凸轮910围绕平行于翻转装置150的翻转轴wa定向的旋转轴线旋转。通过该旋转运动,凸轮910致动可旋转地安装的摇臂920,该拨块的远离凸轮910的末端成型为柱塞。拨块920的回返运动同样可通过弹簧配置实现。有利地,该凸轮/拨块配置910、920及其旋转驱动器布置在翻转装置150的朝向翻转装置150的马达驱动器170的一侧上。
115.在一个变型中,本配置仅具一个包含例如24个拾取工具的翻转装置。该翻转装置相对x、y主轴旋转45
°
(或30
°‑
60
°
的范围)。在该变型中,组件储库布置在翻转装置上方,放置处布置在翻转装置下方。具有(四个)成像传感器、光路偏转器(反射镜)的用于在两个检查位置上对组件进行侧面检查的检查系统能够在翻转装置旋转或运动期间,在两个非平行的边缘上直接对侧面进行检查,而不需要拾取工具的z冲程。在侧面检查位置的拾取工具上没有z冲程可以节省时间,从而增大组件处理量。
116.在此描述的方法方案以及装置方案及其功能及运行情况仅为了使结构、工作方式及特性更易理解;本案公开内容并不会因此局限于这些实施例。附图中部分地采用示意性显示,其中主要特性及效果被部分显著放大展示,用以阐释功能、作用原理、技术方案及特征。其中,附图或文本中所公开的任何一种工作方式、原理、技术方案及特征都可与任一权利要求、说明书及其它附图中的任一项特征、本公开所包含或可从本公开推导的其他工作方式、原理、技术方案及特征自由组合,凡可设想的组合,都可指定给在此描述的处理方式。另,说明书各章节及权利要求书中所有单个实施方案间的组合以及说明书、权利要求书及
附图中不同方案间的组合也属于本发明的公开内容。权利要求书也不对本发明的公开内容及所有公开特征间的可能组合构成限制。显然,凡被公开特征,无论其为单项特征或与所有其他特征组合,都为本公开内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。