技术特征:
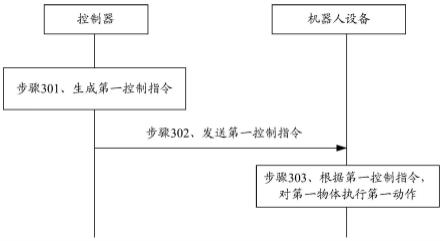
1.一种控制方法,其特征在于,应用于机器人设备,所述方法包括:所述机器人设备接收来自控制器的第一控制指令,所述第一控制指令包括至少一个控制参数以及所述至少一个控制参数的第一参数值,所述第一控制指令用于指示所述机器人设备对第一物体执行第一动作,所述至少一个控制参数的第一参数值用于指示所述机器人设备执行所述第一动作的位姿,不同的动作对应的至少一个控制参数相同;所述机器人设备根据所述第一控制指令,对所述第一物体执行所述第一动作。2.根据权利要求1所述的方法,其特征在于,所述至少一个控制参数包括第一类型参数、第二类型参数,所述第一类型参数的参数值用于指示所述第一物体的信息,所述第二类型参数的参数值用于指示所述机器人设备执行所述第一动作的驱动器。3.根据权利要求1或2所述的方法,其特征在于,所述第一控制指令还包括第一数值,所述第一数值用于反映所述机器人设备执行所述第一动作的动作幅度。4.根据权利要求1所述的方法,其特征在于,所述方法还包括:所述机器人设备向所述控制器发送第一响应消息,所述第一响应消息用于指示所述第一动作执行完成。5.根据权利要求4所述的方法,其特征在于,所述方法还包括:所述机器人设备接收来自所述控制器的第二控制指令,所述第二控制指令包括至少一个控制参数以及所述至少一个第一控制参数的第二参数值,所述第二控制指令用于指示所述机器人设备对第二物体执行第二动作,所述第二参数值与所述第一参数值不同,所述至少一个控制参数的第二参数值用于指示所述第二物体的信息;所述机器人设备根据所述第二控制指令,对所述第二物体执行所述第二动作。6.一种控制方法,其特征在于,应用于控制器,所述方法包括:所述控制器生成第一控制指令,所述第一控制指令用于指示所述机器人设备对所述第一物体执行所述第一动作,所述第一控制指令包括至少一个控制参数以及所述至少一个控制参数的第一参数值,所述至少一个控制参数的第一参数值用于指示所述机器人设备执行所述第一动作的位姿,不同的动作对应的至少一个控制参数相同;所述控制器向所述机器人设备发送第一控制指令。7.根据权利要求6所述的方法,其特征在于,所述至少一个控制参数包括第一类型参数、第二类型参数,所述第一类型参数的参数值用于指示所述第一物体的信息,所述第二类型参数的参数值用于指示所述机器人设备执行所述第一动作的驱动器。8.根据权利要求6或7所述的方法,其特征在于,在所述控制器向所述机器人设备发送第一控制指令之前,所述方法还包括:所述控制器确定所述机器人设备位于初始位置,且所述机器人设备处于空闲状态。9.根据权利要求8所述的方法,其特征在于,所述方法还包括:所述控制器向所述机器人设备发送第二控制指令,所述第二控制指令包括至少一个控制参数以及所述至少一个第一控制参数的第二参数值,所述第二控制指令用于指示所述机器人设备对第二物体执行第二动作,所述至少一个控制参数的第二参数值用于指示所述机器人设备执行所述第二动作的位姿,所述第二参数值与所述第一参数值不同。10.一种控制系统,其特征在于,所述控制系统包括机器人设备以及控制器,所述机器人设备与所述控制器通信连接,所述机器人设备用于执行权利要求1-5任一项所述的方法,
所述控制器用于执行权利要求6-9任一项所述的方法。
技术总结
本申请公开一种控制方法及控制系统,涉及搬运设备技术领域,能够降低机器人设备在执行动作时的难度。该控制方法包括:机器人设备接收来自控制器的第一控制指令,该第一控制指令包括至少一个控制参数以及至少一个控制参数的第一参数值,第一控制指令用于指示机器人设备对第一物体执行第一动作,至少一个控制参数的第一参数值用于指示机器人设备执行第一动作的位姿,不同的动作对应的至少一个控制参数相同。机器人设备根据第一控制指令,对第一物体执行第一动作。本申请实施例应用于物体的搬运过程。运过程。运过程。
技术研发人员:王毅 王松柏 何烽光 王广炎
受保护的技术使用者:合肥欣奕华智能机器股份有限公司
技术研发日:2020.12.01
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。