1.本发明涉及微机械弱耦合谐振式传感器系统,特别是涉及一种弱耦合谐振式传感器的能量守恒闭环控制装置。
背景技术:
2.基于模式局部化效应的弱耦合谐振器是一种新型的敏感元件,目前得到了学术界的深入研究。当参数对称的弱耦合谐振系统受到极小的非对称扰动时,系统的能量分布会发生剧烈的变化,从而导致弱耦合谐振系统的振幅比发生变化。因此,可以通过测量弱耦合谐振器的振幅比变化来测量外部信号。通常,基于振幅比输出的弱耦合谐振式传感器具有更高的相对机械灵敏度和更好的环境鲁棒性,特别适合开发各类高性能传感器。
3.近年来,国内外研究机构针对弱耦合谐振式传感器的测控系统进行了一系列的研究。2018年,西北工业大学的honglong chang等人提出了一种基于频率闭环控制的弱耦合谐振式加速度计,通过锁相环电路实现了对于弱耦合谐振器的谐振频率的跟踪测量。但是,目前大部分研究机构提出的弱耦合谐振式传感器的控制系统采用的都是开环测量方案或者是频率闭环控制测量方案,系统的零偏稳定性较差,限制了弱耦合谐振式传感器在高性能场景中的应用。
技术实现要素:
4.为解决上述问题,本发明公开了一种弱耦合谐振式传感器的能量守恒闭环控制装置,通过能量守恒闭环控制模块将弱耦合谐振系统的整体振动能量稳定在设定参考值,可以有效提升弱耦合谐振式传感器的零偏稳定性,从而扩展其应用场景。
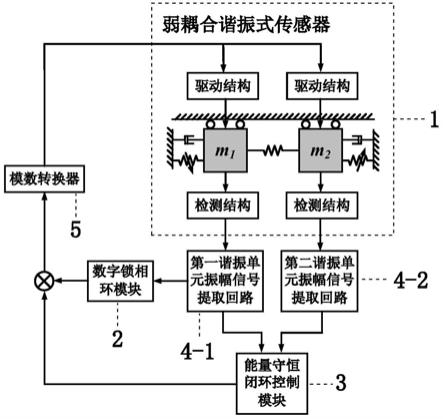
5.一种弱耦合谐振式传感器的能量守恒闭环控制装置,由弱耦合谐振器、第一、二谐振单元振幅信号提取回路和、数字锁相环模块、能量守恒闭环控制模块、数模转换器组成;其中弱耦合谐振器上的两个检测结构分别与第一、二谐振单元振幅信号提取回路的信号输入端相连接;所述第一、二谐振单元振幅信号提取回路的信号输出端分别与能量守恒闭环控制模块的信号输入端相连接;其中第一谐振单元振幅信号提取回路的频率信号输出端与数字锁相环模块的信号输入端相连接;数字锁相环模块的输出信号与能量守恒闭环控制模块的输出信号相乘后经数模转换器转换为模拟信号后施加至弱耦合谐振器的两个谐振单元的驱动结构;弱耦合谐振系统的整体振动能量可以通过将第一、二谐振单元振幅信号提取回路的输出信号进行平方后求和得到,并且由能量守恒闭环控制模块稳定在固定参考值。无论外界输入信号如何变化,弱耦合谐振系统的整体能量始终稳定,此时弱耦合谐振式传感器的零偏稳定性相对于开环检测系统能够提到显著提升。
6.进一步地,所述第一、二谐振单元振幅信号提取回路完全一致,均包括电容
‑
电压变换器、放大器、整流器、比较器、低通滤波器、模数转换器;所述电容
‑
电压变换器的输入端与弱耦合谐振器的中谐振单元的检测结构相连接,输出端与放大器输入端相连接;放大器的输出端分别与比较器和整流器相连接;比较器的输出端与整流器的输入端相连接;整流
器的输出端与低通滤波器的输入端相连接;低通滤波器的输出端和模数转换器的输入端相连接;谐振单元振幅信号提取回路可以提取弱耦合谐振系统的两个谐振单元的振幅、频率、相位信息。
7.进一步地,所述数字锁相环模块包括鉴频鉴相器、环路滤波器、第一pi控制器、数字压控振荡、第三比较器;所述鉴频鉴相器的输入端与第一谐振单元振幅信号提取回路的比较器的信号输出端相连接,输出端与环路滤波器输出端相连接;环路滤波器的输出端与第一pi控制器相连接;第一pi控制器的输出端与数字压控振荡器的输入端相连接;数字压控振荡器的输出端与第三比较器的输入端相连接;第三比较器的输出端与鉴频鉴相器的相位信号输入端相连接。数字锁相环模块可以快速锁定弱耦合谐振器的固有频率
8.进一步地,所述能量守恒闭环控制模块包括第一乘法器、第二乘法器、加法器、低通滤波器、第二pi控制器;其中第一乘法器的两路信号输入端均与第一谐振单元振幅信号提取回路的模数转换器的输出端相连接,第二乘法器的两路信号输入端均与第二谐振单元振幅信号提取回路的模数转换器的输出端相连接;第一、第二乘法器的输出端分别与加法器的两路信号输入端相连接;加法器的输出端与低通滤波器的输入端相连接;低通滤波器的输出端与基准信号相减后与第二pi控制器的输入端相连接。能量守恒闭环控制模块可以使弱耦合谐振系统的整体能量稳定在固定参考值。
9.进一步的,数字锁相环回路能够使施加在弱耦合谐振器的谐振单元驱动机构上的驱动信号频率与弱耦合谐振系统的固有频率一致;而能量守恒闭环控制系统能够使弱耦合谐振器的整体能量处于稳定状态。由控制系统的基本理论可知,当谐振系统的能量处于稳定状态时,系统的零偏稳定性能够得到显著提升。因此,此时弱耦合谐振式传感器的噪声特性能够得到显著的改善。
10.有益效果:本发明相对于现有技术而言具有以下优点:
11.(1)采用数字锁相环模块来实现驱动信号对于弱耦合谐振器的固有频率的跟踪锁定,具有速度快、精度高等优点;
12.(2)基于能量守恒闭环控制实现了弱耦合谐振系统的整体能量的稳定控制,有利于提升弱耦合谐振式传感器的零偏稳定性。
附图说明
13.图1为本发明的总体框图;
14.图2为数字锁相环模块的框图;
15.图3为能量守恒闭环控制模块的框图;
16.图4为谐振单元振幅信号提取回路的框图。
17.其中1
‑
弱耦合谐振器;2
‑
数字锁相环模块;3
‑
能量守恒闭环控制模块;4
‑1‑‑
第一谐振单元振幅信号提取回路;4
‑2‑
第二谐振单元振幅信号提取回路;5
‑
数模转换器。
具体实施方式
18.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远
离特定部件几何中心的方向。
19.如图1所示,本实施例的一种弱耦合谐振式传感器的能量守恒闭环控制装置,由弱耦合谐振器1、第一、二谐振单元振幅信号提取回路4
‑
1和4
‑
2、数字锁相环模块2、能量守恒闭环控制模块3、数模转换器5组成;其中弱耦合谐振器1上的两个检测结构分别与第一、二谐振单元振幅信号提取回路4
‑
1、4
‑
2的信号输入端相连接;所述第一、二谐振单元振幅信号提取回路4
‑
1、4
‑
2的信号输出端分别与能量守恒闭环控制模块3的信号输入端相连接;其中第一谐振单元振幅信号提取回路4
‑
1的频率信号输出端与数字锁相环模块2的信号输入端相连接;数字锁相环模块2的输出信号与能量守恒闭环控制模块3的输出信号相乘后经数模转换器5转换为模拟信号后施加至弱耦合谐振器1的两个谐振单元的驱动结构;弱耦合谐振系统的整体振动能量可以通过将第一、二谐振单元振幅信号提取回路4
‑
1、4
‑
2的输出信号进行平方后求和得到,并且由能量守恒闭环控制模块3稳定在固定参考值。无论外界输入信号如何变化,弱耦合谐振系统的整体能量始终稳定,此时弱耦合谐振式传感器的零偏稳定性相对于开环检测系统能够提到显著提升。
20.如图2所示,所述第一、二谐振单元振幅信号提取回路4
‑
1、4
‑
2完全一致,均包括电容
‑
电压变换器、放大器、整流器、比较器、低通滤波器、模数转换器;所述电容
‑
电压变换器的输入端与弱耦合谐振器1的中谐振单元的检测结构相连接,输出端与放大器输入端相连接;放大器的输出端分别与比较器和整流器相连接;比较器的输出端与整流器的输入端相连接;整流器的输出端与低通滤波器的输入端相连接;低通滤波器的输出端和模数转换器的输入端相连接;谐振单元振幅信号提取回路可以提取弱耦合谐振系统的两个谐振单元的振幅、频率、相位信息。
21.如图3所示,所述数字锁相环模块2包括鉴频鉴相器、环路滤波器、第一pi控制器、数字压控振荡、第三比较器;所述鉴频鉴相器的输入端与第一谐振单元振幅信号提取回路4
‑
1的比较器的信号输出端相连接,输出端与环路滤波器输出端相连接;环路滤波器的输出端与第一pi控制器相连接;第一pi控制器的输出端与数字压控振荡器的输入端相连接;数字压控振荡器的输出端与第三比较器的输入端相连接;第三比较器的输出端与鉴频鉴相器的相位信号输入端相连接。数字锁相环模块2可以快速锁定弱耦合谐振器的固有频率。
22.如图4所示,所述能量守恒闭环控制模块3包括第一乘法器、第二乘法器、加法器、低通滤波器、第二pi控制器;其中第一乘法器的两路信号输入端均与第一谐振单元振幅信号提取回路4
‑
的模数转换器的输出端相连接,第二乘法器的两路信号输入端均与第二谐振单元振幅信号提取回路4
‑
2的模数转换器的输出端相连接;第一、第二乘法器的输出端分别与加法器的两路信号输入端相连接;加法器的输出端与低通滤波器的输入端相连接;低通滤波器的输出端与基准信号相减后与第二pi控制器的输入端相连接。能量守恒闭环控制模块3可以使弱耦合谐振系统的整体能量稳定在固定参考值。
23.数字锁相环回路2能够使施加在弱耦合谐振器1的谐振单元驱动机构上的驱动信号频率与弱耦合谐振系统的固有频率一致;而能量守恒闭环控制系统3能够使弱耦合谐振器的整体能量处于稳定状态。由控制系统的基本理论可知,当谐振系统的能量处于稳定状态时,系统的零偏稳定性能够得到显著提升。因此,此时弱耦合谐振式传感器的噪声特性能够得到显著的改善。
24.二自由度弱耦合谐振系统的运动方程可以表示为:
[0025][0026]
式(1)中,m1和m2分别表示第一谐振单元和第二谐振单元的振动质量;c1和c2分别表示第一谐振单元和第二谐振单元的系统阻尼;k1和k2分别表示第一谐振单元和第二谐振单元的等效支撑敢赌;x1和x2分别表示第一谐振单元和第二谐振单元的振动位移;k
c
表示谐振系统的耦合刚度。当对弱耦合谐振系统进行能量守恒控制时,谐振单元所受到的驱动力可以表示为:
[0027]
f=kv
a
(t)cosω
n
t
ꢀꢀ
(2)
[0028]
其中,k表示增益系数,ω
n
表示数字锁相环输出的驱动信号频率,v
a
(t)为能量守恒闭环控制系统中pi控制器的输出,有:
[0029][0030]
其中,k
amp
表示前置放大器系数,v
ref
表示pi控制器的参考电压,k
xc
、k
cv
表示电容
‑
电压转换电路的放大系数。当系统处于平衡状态时,求解方程(1)后可得:
[0031][0032]
此时,弱耦合谐振系统的振幅比和系统能量可以表示为:
[0033][0034]
方程(5)表明,基于能量守恒闭环控制系统的弱耦合谐振器的振幅比与理论公式完全一致,且此时弱耦合谐振系统的总能量始终稳定在与参考系数v
ref
成比例的固定值。因此,此时弱耦合谐振系统的总能量与外部刚度扰动无关。通过能量守恒闭环控制系统,弱耦合谐振系统的输出稳定性显着提高,抗干扰能力也得到了相应的增强。
[0035]
本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。