1.本发明涉及一种间隙测量装置及方法。
背景技术:
2.静电卡盘包括支承部件和围绕支承部件的边缘环。支承部件与边缘环之间的间隙应该是恒定的。可以通过拍摄支承部件和边缘环来检查支承部件与边缘环之间的间隙,但是所拍摄的图像可能根据静电卡盘所处的腔室内的条件、被拍摄物体的反射率等而不同。在这种情况下,难以准确地拍摄支承部件与边缘环之间的间隙。
技术实现要素:
3.本发明要解决的技术问题是提供一种能够准确地测量相邻的部件之间的间隙的间隙测量方法。
4.本发明要解决的另一技术问题是提供一种能够准确地测量相邻的部件之间的间隙的间隙测量装置。
5.本发明的技术问题不限于以上提及的技术问题,本领域技术人员将可以通过下面的记载清楚地理解未提及的其它技术问题。
6.用于解决上述技术问题的本发明的间隙测量方法的一方面包括以下步骤:准备包括第一部件和第二部件的被测装备;向所述被测装备照射激光,并利用第一设定的拍摄模块拍摄所述被测装备从而获取第一图像,其中,所述第一图像包括与所述第一部件的表面对应的第一激光线图像和与所述第二部件的表面对应的第二激光线图像;基于所述第一图像中的所述第二激光线图像的最大宽度,将所述拍摄模块从所述第一设定修改为第二设定;向所述被测装备照射激光,并利用所述第二设定的所述拍摄模块拍摄所述被测装备从而获取第二图像;以及基于所述第二图像中的所述第一激光线图像与所述第二激光线图像之间的不连续区域,算出所述第一部件与所述第二部件之间的间隙。
7.用于解决上述技术问题的本发明的间隙测量方法的另一方面包括以下步骤:准备被测装备,所述被测装备包括边缘环和布置在所述边缘环的内侧的支承部件;由机械臂使视觉晶片位于所述被测装备的上方,其中,所述视觉晶片包括:能够向所述被测装备照射激光的发光模块和能够对所述被测装备进行拍摄的拍摄模块;由所述发光模块向所述被测装备照射激光,并利用第一设定的拍摄模块拍摄所述被测装备从而获取第一图像,其中,所述第一图像包括与所述边缘环的表面对应的第一激光线图像和与所述支承部件的表面对应的第二激光线图像;算出所述第一图像中的所述第二激光线图像的最大宽度;如果所述最大宽度大于预设的第一范围的上限,则提高所述拍摄模块的相机的快门速度或降低所述相机的增益;以及如果所述最大宽度小于所述预设的第一范围的下限,则降低所述拍摄模块的相机的快门速度或提高所述相机的增益。
8.用于解决上述另一技术问题的本发明的间隙测量装置的一方面包括:测量单元,包括发光模块和拍摄模块;以及分析单元,分析由所述测量单元拍摄的图像,其中,所述测
量单元通过所述发光模块向包括所述第一部件和所述第二部件的被测装备照射激光,并利用第一设定的所述拍摄模块拍摄所述被测装备从而获取第一图像,其中,所述第一图像包括与所述第一部件的表面对应的第一激光线图像和与所述第二部件的表面对应的第二激光线图像,所述分析单元基于所述第一图像中的所述第二激光线图像的最大宽度,确定是否改变所述拍摄模块的设定,所述分析单元指示所述测量单元将所述拍摄模块从第一设定修改为第二设定,所述测量单元通过所述发光模块向所述被测装备照射激光,并利用所述第二设定的所述拍摄模块拍摄所述被测装备从而获取第二图像,所述分析单元基于所述第二图像中的所述第一激光线图像与所述第二激光线图像之间的不连续区域,算出所述第一部件与所述第二部件之间的间隙。
9.其它实施例的具体事项包括在详细的说明及附图中。
附图说明
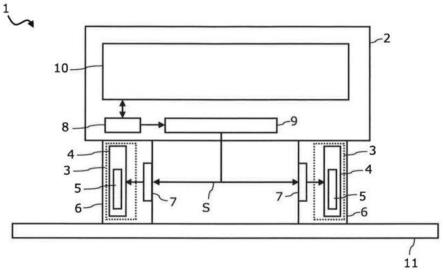
10.图1是用于说明根据本发明的一些实施例的间隙测量装置的框图。
11.图2是用于说明图1的间隙测量装置的操作的概念图。
12.图3是用于说明由图1的拍摄模块拍摄的图像的图。
13.图4是用于说明根据本发明一实施例的间隙测量方法的流程图。
14.图5是用于说明对拍摄模块的设置进行调整的方法的流程图。
15.图6是用于说明在图4的步骤s510中获取的第一图像的图。
16.图7是用于说明在图4的步骤s530中获取的第三图像的图。
17.图8是用于说明根据本发明另一实施例的间隙测量方法的图。
18.图9是用于说明根据本发明又一实施例的间隙测量方法的图。
19.图10是用于说明根据本发明又一实施例的间隙测量方法的图。
具体实施方式
20.下面,将参照附图详细描述本发明的优选的实施例。本发明的优点和特征以及实现这些优点和特征的方法将通过参照下面与附图一起详细描述的实施例而变得清楚。然而,本发明并不限于以下所公开的实施例,而是能够以彼此不同的多种形态实现,本实施例只是为了使本发明的公开完整,并向本发明所属技术领域的普通技术人员完整地告知发明的范围而提供的,本发明仅由权利要求书的范围限定。在整个说明书中,相同的附图标记指代相同的构成要素。
21.元件或层被称为在另一个元件或层“上(on)”或“上方(on)”不仅包括其在另一个元件或层的正上方,而且还包括其它层或其它元件介于中间的情况。相反,元件被称为“直接”在另一个元件“上”或者在另一个元件的正上方表示没有其它元件或层介于中间的情况。
22.虽然术语“第一”、“第二”等用于描述各种元件、构成要素和/或部分,但是这些元件、构成要素和/或部分显然不被这些术语所限制。这些术语仅用于区分一个元件、构成要素和/或部分与另一个元件、构成要素和/或部分。因此,以下提及的第一元件、第一构成要素或第一部分在本发明的技术思想之内显然也可以是第二元件、第二构成要素或第二部分。
23.本说明书中使用的术语是为了说明实施例,并不是为了限制本发明。在本说明书中,除非在句中特别提及,单数形式也包括复数形式。说明书中使用的“包括(comprises)”和/或“包括(comprising)”不排除除了所提及的构成要素、步骤、操作和/或元件之外存在或增加一个以上的其他构成要素、步骤、操作和/或元件。
24.图1是用于说明根据本发明的一些实施例的间隙测量装置的框图。图2是用于说明图1的间隙测量装置的操作的概念图。图3是用于说明由图1的拍摄模块拍摄的图像的图。图3用于说明对图2的a区域进行拍摄的图像。
25.参照图1至图3,根据本发明的一些实施例的间隙测量装置1包括分析单元10和测量单元20。
26.测量单元20对包括第一部件240和第二部件220的被测装备进行测量。在第一部件240与第二部件220之间存在间隙(gap)g。第二部件220可以为圆盘形状,第一部件240可以为围绕圆盘的环形形状,但不限于此。被测装备可以是设置在基板处理装置内的静电卡盘,在这种情况下,第二部件220可以是用于安置基板的支承部件(例如,设置有电极和/或加热器等的介电板),且第一部件240可以是边缘环(或聚焦环)。
27.测量单元20向被测装备照射激光并对上述被测装备进行拍摄。测量单元20可以具有晶片形状的主体。主体内可以设置有发光模块24、拍摄模块26、通信模块29和控制器22。即,测量单元20可以是视觉晶片(vision wafer)形态。这种测量单元20可以在通过机械臂(参照图2的30)进入腔室之后,在测量单元20位于被测装备上方的状态下拍摄被测装备。
28.控制器22控制发光模块24、拍摄模块26、通信模块29等。
29.发光模块24向被测装备照射光(例如,激光)。发光模块24可以在倾斜方向(即,斜线方向)上照射光,但不限于此。
30.拍摄模块26对被测装备进行拍摄。特别地,在由发光模块24向被测装备照射激光的同时,拍摄模块26可以对被测装备进行拍摄。
31.在此,参照图3,由拍摄模块26拍摄的图像可以包括第一部件240、与第一部件240的表面对应的第一激光线图像91、第二部件220、与第二部件220的表面对应的第二激光线图像92、第一部件240与第二部件220之间的间隙g。
32.第一激光线图像91是通过照射的激光在第一部件240的表面附近生成的图像,并且其宽度可以根据激光的散射量而不同。第二激光线图像92是通过照射的激光在第二部件220的表面附近生成的图像,并且其宽度可以根据散射量而不同。
33.在拍摄的图像中,第一部件240和第二部件220在第一方向x上相邻。或者,第一部件240的表面和第二部件220的表面可以平行于第一方向x。另外,第一激光线图像91和第二激光线图像92的宽度可以在第二方向y(即,垂直于第一方向x的方向)上测量。
34.当散射量适当时,如图3所示,第一激光线图像91和第二激光线图像92被明确区分,从而能够准确地测量第一部件240与第二部件220之间的间隙g。相反,当散射量较多时,第一激光线图像91和第二激光线图像92粘连或边界不清楚,从而无法准确地测量第一部件240与第二部件220之间的间隙。在根据本发明的一些实施例的间隙测量装置中,通过适当地调节散射量,准确地测量第一部件240与第二部件220之间的间隙g。对于这种方法,将参照图4至图10详细说明。
35.随着拍摄模块26的设定的改变,拍摄被测装备的图像可能会改变。例如,拍摄模块
26的设定可以是快门速度和/或增益(gain)。如果提高快门速度或降低增益,则所拍摄的图像中由激光产生的散射量减少。相反,如果降低快门速度或提高增益,则所拍摄的图像中由激光产生的散射量增加。
36.通信模块29是用于与分析单元10通信的模块。将由拍摄模块26拍摄的图像提供给分析单元10,并且从分析单元10接收用于控制拍摄模块26和/或发光模块24的命令(command)(或指令)。例如,命令可以是用于提高或降低拍摄模块26的快门速度的命令、用于提高或降低拍摄模块26的增益的命令、用于增加或降低发光模块24的光强度的命令、用于调节发光模块24的光照角度的命令、测量开始/结束命令等。
37.这种通信模块29可以是无线通信或有线通信。特别地,无线通信可以包括有线和无线两种方式。特别地,无线通信可以包括无线保真(wifi:wireless fidelity)、光保真(lifi:light fidelity)、蓝牙、低功耗蓝牙(ble)、紫峰(zigbee)、近场通信(nfc:near field communication)、磁性安全传输(magnetic secure transmission)、射频(rf)和宽带人工网络(ban:body area network)中的至少一个。或者,无线通信可以包括例如使用长期演进(lte:long term evolution,)、lte演进(lte-a)、码分多址(cdma:code division multiple access)、宽带码分多址(wcdma:wideband cdma,)、通用移动电信系统(umts:universal mobile telecommunications system)、无线宽带(wibro:wireless broadband access service)和全球移动通信系统(gsm:global system of mobile communications)中的至少一个的蜂窝通信。或者,无线通信可以包括全球导航卫星系统(gnss:global navigation satellite system)。gnss例如可以是全球定位系统(gps:global positioning system)、全球导航卫星系统(glonass:global navigation satellite system)、北斗导航卫星系统(以下称为“beidou”)或欧洲伽利略卫星导航系统。有线通信例如可以包括通用串行总线(usb:universal serial bus)、高清晰度多媒体接口(hdmi:high definition multimedia interface)、第232号推荐标准(rs-232:recommended standard232)、电力线通信和普通老式电话服务(pots:plain old telephone service)、以及计算机网络(例如,局域网(lan)或广域网(wan))中的至少一个。
38.分析单元10分析从测量单元20接收的图像,并生成/发送用于控制测量单元20的命令。
39.当在所接收的图像中第一激光线图像91与第二激光线图像92之间的边界清楚时,分析单元10通过图像分析来计算第一部件240与第二部件220之间的间隙g。
40.相反,当在所接收的图像中第一激光线图像91与第二激光线图像92之间的边界不清楚时,分析单元10向测量单元20提供用于改变拍摄模块26的设定的命令。
41.具体地,分析单元10可以基于第二激光线图像92的最大宽度来确定是否改变拍摄模块26的设定。例如,算出第二激光线图像92的最大宽度,并且当最大宽度大于预设的第一范围的上限时,提高拍摄模块26的相机的快门速度或降低增益。当最大宽度小于预设的第一范围的下限时,可以降低拍摄模块26的相机的快门速度或提高增益。
42.这种分析单元10包括处理器12、存储器14和通信模块19。
43.存储器14可以包括易失性存储器(例如,动态随机存储器(dram)、静态随机存储器(sram)或同步动态随机存储器(sdram))和/或非易失性存储器(例如,一次可编程只读存储器(otprom)、可编程只读存储器(prom)、可擦除可编程只读存储器(eprom)、电可擦写可编
程只读存储器(eeprom)、掩模只读存储器(mask rom)、闪速只读存储器(flash rom)、闪存、相位随机存取存储器(pram)、阻变随机存取存储器(rram)、磁性随机存取存储器(mram)、硬盘或固态驱动器(ssd)。存储器14可以包括内置存储器和/或外部存储器。存储器14例如可以存储与电子装置的至少一个其它构成要素相关的命令或数据。另外,存储器14可以存储软件和/或程序。程序例如可以包括内核、中间件、应用程序编程接口(api)和/或应用程序(或“应用”)等。内核、中间件和api的至少一部分可以被称为操作系统。
44.存储器14存储用于使处理器12执行将参照图4至图10后述的间隙测量方法的指令(instructions)。
45.例如,存储器14可以包括指令,该指令用于准备包括第一部件和第二部件的被测装备,向上述被测装备照射激光,并利用第一设定的拍摄模块对上述被测装备进行拍摄从而获取第一图像,其中,上述第一图像包括与上述第一部件的表面对应的第一激光线图像和与上述第二部件的表面对应的第二激光线图像,基于上述第一图像中的上述第二激光线图像的最大宽度,将上述拍摄模块从上述第一设定修改为第二设定,向上述被测装备照射激光,并利用上述第二设定的上述拍摄模块对上述被测装备进行拍摄从而获取第二图像,基于上述第二图像中的上述第一激光线图像与上述第二激光线图像之间的不连续区域,算出上述第一部件与上述第二部件之间的间隙。
46.或者,存储器14可以包括指令,该指令用于准备包括边缘环和设置在上述边缘环的内侧的支承部件的被测装备,由机械臂使视觉晶片位于上述被测装备的上方,其中,上述视觉晶片包括:能够向上述被测装备照射激光的发光模块;以及能够对上述被测装备进行拍摄的拍摄模块,上述发光模块向上述被测装备照射激光,并利用第一设定的拍摄模块拍摄上述被测装备从而获取第一图像,上述第一图像包括与上述边缘环的表面对应的第一激光线图像和与上述支承部件的表面对应的第二激光线图像,计算上述第一图像中的上述第二激光线图像的最大宽度,当上述最大宽度大于预设的第一范围的上限时,提高上述拍摄模块的相机的快门速度或降低增益,当上述最大宽度小于预设的第一范围的下限时,降低上述拍摄模块的相机的快门速度或提高增益。
47.参照图1和图4至图7说明根据本发明一实施例的间隙测量方法。图4是用于说明根据本发明一实施例的间隙测量方法的流程图。图5是用于说明对拍摄模块的设置进行调整的方法的流程图。图6是用于说明在图4的步骤s510中获取的第一图像的图。图7是用于说明在图4的步骤s530中获取的第三图像的图。
48.首先,参照图4和图6,准备包括第一部件(例如,边缘环、聚焦环)和第二部件(例如,介电板)的被测装备。利用发光模块24向被测装备照射激光,并利用第一设定的拍摄模块26拍摄被测装备,从而获取第一图像(图6的img1)(s510)。
49.具体地,拍摄模块26的第一设定可以是对于相机的快门速度和增益的设定。相机的快门速度可以是第一速度,或者增益可以是第一增益。
50.由第一设定的拍摄模块26拍摄的第一图像(图6的img1)包括与第一部件240的表面对应的第一激光线图像91和与第二部件220的表面对应的第二激光线图像92。如图6所示,第一激光线图像91和第二激光线图像92可能会粘连或边界不清楚。
51.第一图像img1的下方示出的曲线t1表示从第一图像img1根据第一激光线图像91和第二激光线图像92的位置所测量的宽度。为了便于说明,曲线t1相对于第一图像img1被
放大示出。
52.接着,参照图4和图6,利用第一图像img1中的第二激光线图像92的最大宽度d1,将拍摄模块26从第一设定修改为第二设定(s520)。
53.具体地,在位置p1测量第二激光线图像92的最大宽度d1。另外,将拍摄模块26从第一设定改变为第二设定的步骤可以包括:将拍摄模块26的相机的快门速度从第一速度修改为第二速度,或者将拍摄模块的增益从第一增益修改为第二增益。
54.在此,参照图5,具体说明利用最大宽度d1来调整拍摄模块26的设定的方法。
55.算出第二激光线图像92的最大宽度d1(s522)。
56.检查最大宽度d1是否大于预设的第一范围的上限(s524)。
57.如果最大宽度d1大于预设的第一范围的上限(s524中为“是”),则提高拍摄模块26的相机的快门速度或降低增益(s525)。由此,可以减少进入拍摄模块26的光量,从而减少由激光引起的散射量。
58.如果最大宽度d1小于预设的第一范围的上限(s524中为“否”),则检查最大宽度d1是否小于预设的第一范围的下限(s526)。如果最大宽度d1小于预设的第一范围的下限(s526中为“是”),则降低拍摄模块26的相机的快门速度或提高增益(s527)。由此,可以增加进入拍摄模块26的光量,从而增加由激光引起的散射量。
59.如果最大宽度d1大于预设的第一范围的下限(s526中为“否”),则最大宽度d1落入预设的第一范围内,因此不需要调整拍摄模块26的设定。
60.再参照图4和图7,由发光模块24向被测装备照射激光,并利用第二设定的拍摄模块26拍摄被测装备从而获取第二图像(图7的img2)。
61.具体地,由第二设定的拍摄模块26拍摄的第二图像(图6的img2)包括与第一部件240的表面对应的第一激光线图像91和与第二部件220的表面对应的第二激光线图像92。如图7所示,可知第一激光线图像91和第二激光线图像92彼此分离。
62.第二图像img2的下方示出的曲线t2表示从第二图像img2根据第一激光线图像91和第二激光线图像92的位置所测量的宽度。为了便于说明,曲线t2相对于第二图像img2被放大示出。
63.接着,参照图4和图7,利用第二图像img2中的第一激光线图像91与第二激光线图像92之间的不连续区域,算出第一部件240与第二部件220之间的间隙。
64.具体地,第一部件240与第二部件220之间的间隙可以利用第二图像img2来算出。即,测量第二图像img2中的第一激光线图像91与第二激光线图像92之间的不连续区域,并使所测量的长度对应于第一部件240与第二部件220之间的间隙。或者,可以在从第二图像img2生成的曲线t2中确认第一激光线图像91与第二激光线图像92之间的不连续区域p2,测量曲线t2中的不连续区域p2,并使所测量的长度对应于第一部件240与第二部件220之间的间隙。
65.总之,从利用第一设定的拍摄模块26拍摄的第一图像img1中算出第二激光线图像92的最大宽度d2,并将拍摄模块26的设定调整为第二设定使得最大宽度d2落入预设的第一范围。在利用第二设定的拍摄模块26重新拍摄而得到的第二图像img2中,可以测量第一部件240与第二部件220之间的间隙。
66.图8是用于说明根据本发明另一实施例的间隙测量方法的图。为了便于说明,将主
要说明不同于利用图1至图7说明的实施例的方面。
67.参照图4和图8,被测装备包括第一部件240和第二部件220。第二部件220可以是圆盘形状(例如,布置在卡盘的边缘环的内侧的支承部件(介电板)),且第一部件240可以是围绕圆盘的环形形状(例如,卡盘的边缘环)。
68.向被测装备照射激光,并利用第一设定的拍摄模块来拍摄第一部件240与第二部件220之间的多个空间81、82、83、84,从而获取多个第一图像img1(参照图4的s510)。
69.多个第一图像img1可以是在以圆盘o的中心为基准的虚拟坐标中在与0
°
和180
°
对应的空间81、82中拍摄的图像。或者,可以是在虚拟坐标中在与90
°
和270
°
对应的空间83和84中拍摄的图像。即,可以在虚拟坐标中拍摄原点对称的空间。
70.接着,在多个第一图像img1中的每个中,利用第二激光线图像92的最大宽度,将拍摄模块26从第一设定修改为第二设定(参照图4的s520)。
71.接着,向被测装备照射激光,并利用第二设定的拍摄模块重新拍摄第一部件240与第二部件220之间的多个空间81、82、83、84,从而获取多个第二图像img2(参照图4的s530)。
72.接着,从多个第二图像img2中的每个中算出多个间隙(参照图4的s540)。例如,如果多个空间81、82、83、84中的每个中的间隙g1、g2、g3、g4在预设的范围内,则判断为第一部件240和第二部件220的设置是适当的。相反,如果从空间81、82、83、84中的每个中算出的间隙g1、g2、g3、g4中的至少一个超出预设的范围,则需要重新设置第一部件240和/或第二部件220。例如,如果间隙g1远小于间隙g2,则可知在图8中观察时第二部件220向右侧偏移。或者,如果间隙g3远小于间隙g4,则可知在图8中观察时第二部件220向上方偏移。即,通过在虚拟坐标中拍摄原点对称的空间(例如,81、82),可以确认第二部件220是否偏移。
73.图9是用于说明根据本发明又一实施例的间隙测量方法的图。用于说明利用第一图像来调整拍摄模块的设定的方法。
74.参照图9,利用第一设定的拍摄模块26拍摄被测装备,从而获取第一图像img1。曲线t3表示从第一图像img1根据第一激光线图像91和第二激光线图像92的位置所测量的宽度。
75.在曲线t3中,可以在第一激光线图像91与第二激光线图像92之间的区域中算出最大宽度和最小宽度,并利用最大宽度和最小宽度来调整拍摄模块的设定。在曲线t3中,在位置p2处测量到最小宽度,且在位置p1处测量到最大宽度。测量对应于最大宽度的位置p1与对应于最小宽度的位置p2之间的距离l1。可以修改拍摄模块26的设定,使得距离l1落入预设的第二范围内。
76.例如,如果距离l1小于预设的第二范围的下限,则可以提高拍摄模块26的快门速度或降低增益。由此,可以减少进入拍摄模块26的光量,从而减少由激光引起的散射量,并且增加距离l1。
77.或者,如果距离l1大于预设的第二范围的上限,则可以降低拍摄模块26的相机的快门速度或者提高增益。由此,可以增加进入拍摄模块26的光量,从而增加由激光引起的散射量,并且减小距离l1。
78.图10是用于根据本发明又一实施例的间隙测量方法的图。用于说明利用第一图像来调整拍摄模块的设定的方法。
79.参照图10,利用第一设定的拍摄模块26拍摄被测装备,从而获取第一图像img1。曲
线t4表示从第一图像img1根据第一激光线图像91和第二激光线图像92的位置所测量的宽度。
80.在曲线t4中,可以在第一激光线图像91与第二激光线图像92之间的区域中算出最大宽度和最小宽度,并算出最小宽度到最大宽度之间的曲线的斜率,并且利用最大宽度和最小宽度来调整拍摄模块的设定。
81.具体地,在曲线t4中,在位置p2处测量到最小宽度,在位置p1处测量到最大宽度。对从位置p2到位置p1的曲线t4进行微分从而算出斜率(即,切线斜率或瞬间变化率)。在位置p3处算出最大斜率(slope)。可以修改拍摄模块26的设定,使得对应于最大斜率的位置p3与对应于最大宽度的位置p1之间的距离l2落入预设的第三范围内。
82.在利用图9说明的方法中,由于需要测量对应于最大宽度的位置p1与对应于最小宽度的位置p2之间的距离l1,因此需要准确地确定最小宽度。这是因为,由此才能确定对应于最小宽度的位置p2。然而,根据第一图像img1的状态,也存在有可能无法清楚地确定最小宽度的情况。在这种情况下,可以使用参照图10说明的方法。这是因为,即使不能清楚地确定最小宽度,也能够通过计算曲线t4的斜率(切线斜率)来获取对应于最大斜率的位置p3。
83.例如,如果距离l2小于预设的第二范围的下限,则可以提高拍摄模块26的快门速度或降低增益。由此,可以减少进入拍摄模块26的光量,从而减少由激光引起的散射量,并且增加距离l2。
84.另外,如果距离l2大于预设的第二范围的上限,则可以降低拍摄模块26的相机的快门速度或提高增益。由此,可以增加进入拍摄模块26的光量,从而增加由激光引起的散射量,并且减小距离l2。
85.以上参照附图对本发明的实施例进行了说明,但是本发明所属技术领域的普通技术人员应该可以理解,本发明在不改变其技术思想或必要特征的情况下,能够以其他具体形态实施。因此,应该理解,以上描述的实施例在所有方面都是示例性的,而不是限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。