1.本发明设计了基于复合电源的大型无人送餐车,属于能源动力领域。
背景技术:
2.本发明提出基于复合电源的大型无人送餐车,节省时间节省人力。其总体结构包括通讯系统、控制器、驱动器、超级电容、动力电池、dc/dc、dc/ac、减速器、电机、车轮、温度传感器、餐饮柜等,其中超级电容和动力电池作为复合电源系统不仅可以给餐饮保温,而且可以使得餐车运行平稳,具有更长的使用寿命,今后有望在社区、医院、学校、企业等更多的场合提供服务。
技术实现要素:
3.本发明的目的是提出了基于复合电源的大型无人送餐车。
4.为了实现上述目的,本发明采用的技术方案:
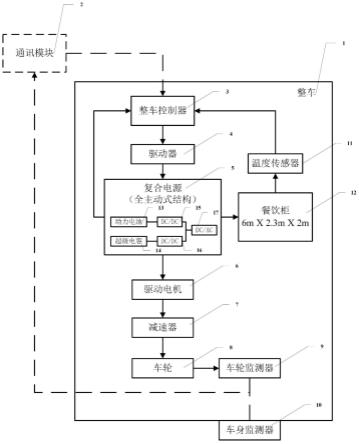
5.本发明基于复合电源的大型无人送餐车,其特点包括:整车(1)、通讯模块(2)、整车控制器(3)、驱动器(4)、复合电源系统(5)、驱动电机(6)、减速器(7)、车轮(8)、车轮监测器(9)、车身监测器(10)、温度传感器(11)和餐饮柜(12)。
6.所述复合电源系统(5)包括动力电池组(13)、超级电容组(14)、dc/dc转换器1(15)、 dc/dc转换器2(16)、dc/ac逆变器(17),其中动力电池(13)和超级电容(14)分别 dc/dc转换器1(15)和dc/dc转换器2(16)相连接,二者并联后与dc/ac逆变器(17) 串联。
7.所述整车(1)连接结构如下:通讯模块(2)作为独立于整车机械结构之外的信号部件与车轮监测器(9)相通,并与整车控制器(3)相连,整车控制器(3)与驱动器(4) 串联,驱动器(4)与复合电源系统(5)相连,复合电源系统(5)输出的能量一部分到达驱动电机(6)运转,将电能转化为机械能,经过减速器(7)分配到车轮(8)驱动整车行驶,另一部分到达餐饮柜(12),维持餐饮处于一个适宜的温度。与餐饮柜(12)串联一个温度传感器(11),该温度传感器(11)与负责把餐饮的温度传递到整车控制器(3),同时驱动器(4)和复合电源系统(5)相连,通过分析复合电源系统(5)反馈的动力电池(13)和超级电容(14)剩余能量以及餐饮柜温度传感器(11)的温度,整车控制器(3) 对复合电源系统(5)的能量进行合理分配。
8.与已有技术相比,本发明有益效果体现在
9.1.爬坡或加速时使用超级电容进行大功率充放电可以提高续驶里程,延长动力电池的循环使用寿命。
10.2.超级电容可给动力电池进行预加热,使得整车具有良好的低温启动性,不受环境条件约束。
11.3.复合电源系统可给餐饮保温。
附图说明
12.图1是基于复合电源的大型无人送餐车的结构示意图。图中标号:整车(1)、通讯模
块(2)、整车控制器(3)、驱动器(4)、复合电源系统(5)、驱动电机(6)、减速器(7)、车轮(8)、车轮监测器(9)、车身检测器(10)、温度传感器(11)和餐饮柜(12)。
13.图2是基于复合电源的大型无人送餐车的控制流程图,一次送餐的起始到结束全过程如图所示。
14.图3是基于复合电源的大型无人送餐车的整车能量管理方法图。所述复合电源系统能量管理方法为根据车辆的行驶状态,判断复合电源系统的工作模式,考虑餐饮的保温,再然后结合需求功率、动力电池以及超级电容的荷电状态进行能量分配。
具体实施方式
15.下面结合附图及具体实施方式对本发明进一步解释
16.2.进一步,所述通讯模块(2)包括一台用于接收和记录数据的上位机,和局域网。
17.3.进一步,所述温度传感器(11)用于实时监测餐饮柜(12)内部的温度,并及时反馈给整车控制器(3)模块,温度低时控制超级电容(14)或动力电池(13)将更多的电量用于发热,维持食物的在一个合适的温度范围内。
18.4.进一步,所述整车控制器(3)用于接收餐饮温度传感器(11)发出的温度信号,复合电源系统(5)电量的剩余情况以及通讯模块(2)对于无人车的位置和速度的监控信息,在接收到信息的基础上进行决策,再将结果传递给驱动器(4)。
19.5.进一步,所述复合电源系统(5)包括动力电池组(13)、超级电容组(14)、dc/dc 转换器1(15)、dc/dc转换器2(16)、dc/ac逆变器(17),其中动力电池(13)和超级电容(14)分别dc/dc转换器1(15)和dc/dc转换器2(16)相连接,二者并联后与dc/ac 逆变器(17)串联。
20.6.进一步,所述餐饮柜(12)包括内部存储空间和表面显示屏,表面显示器位于车身右侧。
21.7.进一步,所述复合电源系统能量管理方法为根据车辆的行驶状态,判断复合电源系统的工作模式,考虑餐饮的保温,再然后结合需求功率、电池以及超级电容的荷电状态进行能量分配:
22.具体如下:
23.设preq为电机的需求功率,pb_max为电池输出功率上限值,pave 和pave-分别为电池放电和充电功率的平均值,pc为超级电容提供的功率,pb为电池提供的功率,socc_max 为设定的超级电容荷电状态的上限值,socc_min则为设定的超级电容荷电状态的下限值, pt为餐饮柜所需功率;
24.(1)若汽车加速或上坡,则为放电模式:
25.①
若preq pt>pb_max且preq>pb_max,超级电容和动力电池共同作用,pt由超级电容提供;
26.②
若preq pt>pb_max且preq<pb_max,超级电容和动力电池共同作用,pt由动力电池和超级电容共同提供;
27.③
若0<preq pt<pb_max且preq≤pave ,动力电池单独作用,pt由动力电池提供;
28.④
若0<preq pt<pb_max且preq>pave ,电池作用,当socc》socc_min时,超级电容也作用,pt由超级电容提供,当socc≤socc_min时,超级电容不作用,pt由动力电池提供;
29.(2)若汽车减速或下坡,则为充电模式:
30.①
若pave-≤preq<0,电池单独作用,pt由preq分流提供;
31.②
若preq《pave-,电池作用;当socc≤socc_max时,超级电容也作用,pt由preq 分流提供;当socc>socc_max,超级电容不作用,pt由超级电容提供。
32.步骤1.如1所示为基于复合电源的无人送餐车的整体结构,开始时,对整车控制器(3) 进行初始化。记录车轮监测器(9)传送过来的初始位置,按照既定路线规划行程。
33.步骤2.分析与餐饮柜(12)相连的温度传感器(11)传递到整车控制器(3)的温度,考虑复合电源系统(5)中动力电池(13)和超级电容(14)的电量,分配合适的电量用于餐饮柜(12),使得整车(1)在行驶过程中,餐饮柜(12)均保持在一个合适的温度范围内。
34.步骤3.当环境温度较低时,动力电池(13)启动困难,此时采用超级电容(14)对动力电池(13)组进行适当加热处理,使其达到一个合适的工作温度区间,并开始驱动无人送餐车开始送餐。当环境温度合适时,无需对动力电池(13)进行预加热直接驱动无人送餐车行驶。
35.步骤4.输入地址或距离,通过车轮检测器(9)监控车辆速度和加速度,控制小车自动/手动运行,同时根据复合电源系统(5)中动力电池(13)组和超级电容(14)电量的多少而合理分配需求功率。当在平顺的道路上行驶时,主要由动力电池(13)提供整个行驶路程所需要的能量,在需要加速时或上坡时可采用超级电容(14)进行大电流放电提供额外的能量,从而使得无人送餐车能平稳运行,另一方面也可以延长动力电池(13)的循环使用寿命。
36.步骤5.通过车身监测器(10)感知周围障碍物进行避障,并周期性查询小车是否到达了目的地,当无人送餐车到达目的地时小车停止运行。
37.步骤6.餐车停止后通知客人取餐,取餐码通过扫描餐饮柜(12)右侧的显示屏二维码,避免手动触屏输入密码。当客人输入正确的密码时,对应的餐盒打开,乘客取走餐,一次送餐完成。
38.步骤7.餐盒运送完成后,小车返回起始点进行整体的杀毒消菌处理,并监测此时电量,对动力源进行充电,以便下一次送餐时使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
