技术特征:
1.一种个人导航装置,包括本体、星体跟踪器、倾斜仪、时钟以及位置计算模块,所述位置计算模块被配置为基于来自所述星体跟踪器、所述倾斜仪以及所述时钟的相应输出而计算所述本体的纬度和经度。2.根据权利要求1所述的个人导航装置,进一步包括:eci至ecef变换矩阵计算模块,连接为从所述时钟接收时钟信号,被配置为基于所述时钟信号计算eci至ecef变换矩阵,并且连接为向所述位置计算模块提供所述eci至ecef变换矩阵以在计算纬度和经度时使用。3.根据权利要求1或2所述的个人导航装置,其中,所述星体跟踪器包括摄像机。4.根据权利要求3所述的个人导航装置,其中,所述星体跟踪器进一步包括:姿态计算模块,被配置为基于由所述摄像机捕获的天体的图像而计算所述本体在eci参考系中的姿态。5.根据权利要求3所述的个人导航装置,其中,所述倾斜仪包括具有能够被变换成所述本体的参考系中的三个相互正交的轴的非平面轴的第一加速计、第二加速计以及第三加速计。6.根据权利要求5所述的个人导航装置,其中,所述倾斜仪进一步包括:局部垂直计算模块,被配置为基于由所述第一加速计、所述第二加速计以及所述第三加速计输出的加速计数据而计算所述本体的参考系中的局部垂直。7.根据权利要求5和6中任一项所述的个人导航装置,其中,所述摄像机是短波红外摄像机。8.根据权利要求5或6所述的个人导航装置,进一步包括:壳体,容纳所述本体、所述星体跟踪器、所述倾斜仪、所述时钟以及所述位置计算模块。9.根据权利要求8所述的个人导航装置,进一步包括:gnss接收器和gnss导航软件,所述gnss导航软件被配置为基于由所述gnss接收器接收的卫星信号而计算所述本体的纬度和经度。10.根据权利要求8所述的个人导航装置,进一步包括:soop接收器和soop导航软件,所述soop导航软件被配置为基于由所述soop接收器从soop源接收的信号而计算所述本体的纬度和经度。11.根据权利要求10所述的个人导航装置,其中,所述soop接收器包括软件定义的无线电。12.一种导航系统,包括:传感器头,包括本体,安装至所述本体的摄像机以及安装至所述本体的第一加速计、第二加速计和第三加速计;通信设备,耦接为从所述摄像机接收图像数据并且从所述第一加速计、所述第二加速计以及所述第三加速计接收加速计数据;以及手持式计算/显示装置,连接为经由所述通信设备接收所述图像数据和所述加速计数据,所述手持式计算/显示装置包括:时钟;姿态计算模块,被配置为基于由所述摄像机捕获的天体的图像而计算所述本体在eci参考系中的姿态;局部垂直计算模块,被配置为基于由所述第一加速计、所述第二加速计以及所述第三
加速计输出的加速计数据而计算所述本体的参考系中的局部垂直;以及位置计算模块,被配置为基于来自所述姿态计算模块、所述局部垂直计算模块以及所述时钟的相应输出而计算所述本体的纬度和经度。13.根据权利要求12所述的导航系统,其中,所述第一加速计、所述第二加速计以及所述第三加速计具有非共面轴。14.根据权利要求12或13所述的导航系统,其中,所述摄像机包括短波红外摄像机。15.根据权利要求12或13所述的导航系统,其中,所述手持式计算/显示装置进一步包括eci至ecef变换矩阵计算模块,所述eci至ecef变换矩阵计算模块:连接为从所述时钟接收时钟信号;被配置为基于所述时钟信号计算eci至ecef变换矩阵;并且连接为向所述位置计算模块提供所述eci至ecef变换矩阵,以在计算纬度和经度时使用。16.一种用于确定静止的导航装置的本体相对于地球的位置的方法,所述方法包括:(a)捕获从多个天体发出的光,所述多个天体出现在安装至静止的所述本体的摄像机的视野内;(b)基于由所述摄像机捕获的所述多个天体的图像而计算所述本体在eci参考系中的姿态;(c)使用具有非共面轴的安装至所述本体的加速计测量所述导航装置由于地球重力而产生的加速度;(d)基于所测量的加速度而计算所述本体的参考系中的局部垂直;(e)基于由时钟输出的时钟信号而计算eci至ecef变换矩阵;并且(f)基于所计算的姿态、所计算的垂直以及所述eci至ecef变换矩阵而计算包括所述本体的纬度和经度的天体导航方案。17.根据权利要求16所述的方法,进一步包括:显示指示所述纬度和所述经度的符号。18.根据权利要求16或17所述的方法,其中,当gnss可用时,能够使用基于gnss的方案与天体导航方案之间的差异对误差参数进行校准。19.一种个人导航装置,包括:本体;星体跟踪器;倾斜仪;时钟;第一位置计算模块,被配置为基于来自所述星体跟踪器、所述倾斜仪以及所述时钟的相应输出而计算所述本体的纬度和经度;gnss接收器;以及第二位置计算模块,被配置为基于由所述gnss接收器接收的卫星信号而计算所述本体的纬度和经度。20.根据权利要求19所述的个人导航装置,其中,所述星体跟踪器包括摄像机并且所述倾斜仪包括在所述本体的参考系中具有非共面轴的第一加速计、第二加速计以及第三加速计。21.根据权利要求19或20所述的个人导航装置,进一步包括:显示装置;显示引擎,被配置为在所述显示装置上呈现指示所述个人导航装置的纬度和经度的符号;以及输入装置,被配置为能够实现选择性地在所述个人导航装置位于其中gnss不可用的环境中时通过所述第一位置计算模块或在所述个人导航装置位于其中gnss可用的环境中时
通过所述第二位置计算模块来计算纬度和经度。
技术总结
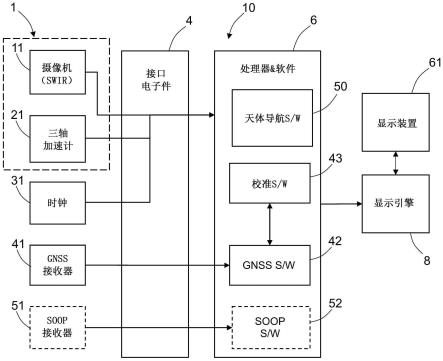
本公开涉及个人导航装置、导航系统及相关方法。一种个人导航装置包括:本体;星体跟踪器;倾斜仪;时钟;GNSS接收器;以及第一和第二位置计算模块。第一位置计算模块被配置为基于来自星体跟踪器、倾斜仪以及时钟的相应输出而计算本体的纬度和经度。第二位置计算模块被配置为基于由GNSS接收器接收的卫星信号而计算本体的纬度和经度。在一个实现方式中,星体跟踪器包括短波红外摄像机并且倾斜仪包括具有非共面轴的三个加速计。个人导航装置可以进一步包括显示装置、显示引擎以及用户界面,用户界面被配置为能够根据GNSS是否可用而选择计算纬度和经度的具体方法。算纬度和经度的具体方法。算纬度和经度的具体方法。
技术研发人员:李荣盛
受保护的技术使用者:波音公司
技术研发日:2021.12.01
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。