1.本发明涉及维修模仿训练技术领域,具体涉及一种维修模仿训练平台及其训练方法。
背景技术:
2.在电力控制体系中,风门开合度操控设备为电控风门的关键构成元件,电控风门运用开合度操纵,经由变动风门开合弧度,来执行进风量变动的模式;因为不少电控风门的所占范围不小,而不能达成在训练房内,尤其为对电气行业的培训,不容易符合需求,因为风门开合度操控设备处在电控风门里,另外电控风门往往为了可靠起见,都设置在不低的位置,若发生异常,就要攀升操作,检修不容易,因此对电控风门的风门开合度操控设备的整体性受训很关键,现在未有一全面的风门开合度操控设备不光能展示电控风门的物理架构,还能虚拟实际电控风门的风门开合度操控设备。
3.总之,现在未有一全面的风门开合度操控设备不光能展示电控风门的物理架构,还能虚拟实际电控风门的风门开合度操控设备。
技术实现要素:
4.为解决上述问题,本发明提供了一种维修模仿训练平台及其训练方法,有效避免了现有技术中未有一全面的风门开合度操控设备不光能展示电控风门的物理架构还能虚拟实际电控风门的风门开合度操控设备的缺陷。
5.为了克服现有技术中的不足,本发明提供了一种维修模仿训练平台及其训练方法的解决方案,具体如下:
6.一种维修模仿训练平台,包括:
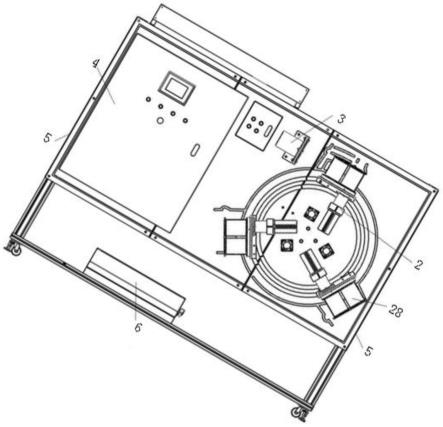
7.承载框5、虚拟风门开合执行设备2、风门开合度操控设备、运动套设备3,所述承载框5上设有电力操作箱4与给电设备;所述虚拟风门开合执行设备2设在所述承载框5上;所述虚拟风门开合执行设备2设在所述电力操作箱4中,且同所述虚拟风门开合执行设备2相连,用来操纵所述所述虚拟风门开合执行设备2运作;所述运动套设备3设在所述承载框5上,用来同所述给电设备与风门开合度操控设备相连。
8.在本发明内,进一步的,所述风门开合度操控设备包含安设块24、牵引马达22、用于风门开合的回转支承23、线性接近传感器27、角位移传感器25与顶板26;所述牵引马达22设在所述安设块24上,且同所述虚拟风门开合执行设备相连,另外所述牵引马达22和所述用于风门开合的回转支承23相连,用来牵引所述用于风门开合的回转支承23旋动;
9.所述顶板26设在所述用于风门开合的回转支承23上,用来与线性接近传感器27相接触,构造为线性接近传感器27的接触组件,所述线性接近传感器27设在所述安设块24上,且同所述虚拟风门开合执行设备相连;所述角位移传感器25设在所述安设块24上,且同所述用于风门开合的回转支承23旋接,另外所述角位移传感器25与所述虚拟风门开合执行设备相连,用来把采集到的所述用于风门开合的回转支承23的旋动速度与旋动弧度传递到所
述虚拟风门开合执行设备。
10.进一步的,所述用于风门开合的回转支承23的外环固连在所述安设块24上,所述用于风门开合的回转支承23的内环和所述牵引马达22的转杆相连,所述角位移传感器25的转子和所述用于风门开合的回转支承23的内环相连,所述顶板26和所述用于风门开合的回转支承23的内环的内表面相连;
11.所述维修模仿训练平台还包含保护壳28,所述保护壳28和所述用于风门开合的回转支承23的内环相连,保护壳28伴着用于风门开合的回转支承23的旋动而旋动,用保护壳28替代风门开合执行训练。
12.在本发明内,进一步的,所述线性接近传感器27包含线性接近传感器一与线性接近传感器二,所述线性接近传感器一与所述线性接近传感器二都设在所述安设块24上;
13.进一步的,在所述用于风门开合的回转支承23旋动事先设定的弧度一时所述顶板26和所述线性接近传感器一相接;或者在所述用于风门开合的回转支承23旋动事先设定的弧度二时所述顶板26和所述线性接近传感器二相接。
14.在本发明内,线性接近传感器一与线性接近传感器二的运用,线性接近传感器一能在π/2(事先设定的弧度一)条件下止位用,在线性接近传感器一相接至顶板26后,线性接近传感器一里的动触点接通,送出电平数据到虚拟风门开合执行设备,构成首轮止位,若在线性接近传感器一无用后,线性接近传感器二就归于备份线性接近传感器能在2π/3(事先设定的弧度二),构成临界区的线性接近传感器。
15.在本发明内,进一步的,所述给电设备是电瓶,且所述电瓶经由电池箱5设在所述承载框5上;自然,给电设备还能接通交流市电来给为电力操作箱4、虚拟风门开合执行设备2、运动套设备3给电。
16.进一步的,所述虚拟风门开合执行设备2的个数为3,毗邻所述虚拟风门开合执行设备2间的弧度是2π/3。
17.详细的,本发明给出的维修模仿训练平台运作时,风门开合度操控设备依据不一样的条件,操纵牵引马达22的运作状态,牵引马达22经由蜗轮同用于风门开合的回转支承23内环咬合合,牵引用于风门开合的回转支承23内环旋动,以此达成风门(保护壳28)的风门开合,另外角位移传感器25即时反馈风门的旋动速度与旋动弧度,还有就是,在顶板26碰到线性接近传感器27时,线性接近传感器27把电瓶数据传递到风门开合度操控设备,风门开合度操控设备操纵牵引马达22终止运作,达成线性接近传感器27约束风门开合临界区。
18.一种维修模仿训练平台的训练方法,包括:
19.维修模仿训练平台运作时,风门开合度操控设备依据不一样的条件,操纵牵引马达22的运作状态,牵引马达22经由蜗轮同用于风门开合的回转支承23内环咬合合,牵引用于风门开合的回转支承23内环旋动,以此达成风门(保护壳28)的风门开合,另外角位移传感器25即时反馈风门的旋动速度与旋动弧度,还有就是,在顶板26碰到线性接近传感器27时,线性接近传感器27把电瓶数据传递到风门开合度操控设备,风门开合度操控设备操纵牵引马达22终止运作,达成线性接近传感器27约束风门开合临界区。
20.本发明的有益效果为:
21.本发明经由在承载框上设置电力操作箱、给电设备、虚拟风门开合执行设备、风门开合度操控设备和运动套设备,依据实际电控风门的风门开合结构设计和风门开合度操控
设备,因此能很好的体验的受训风门开合度操控设备的物理架构,虚拟真实风电机组风门开合运行操纵系统,并还能虚拟电控风门异常诱发与消除异常流程,受训期间还能人工操作风门开合度操控设备的接线实验,利于对风电机组电控风门的受训。有效避免了现有技术中未有一全面的风门开合度操控设备不光能展示电控风门的物理架构还能虚拟实际电控风门的风门开合度操控设备的缺陷。
附图说明
22.图1是本发明的一种维修模仿训练平台的交流设备的基本结构图。
23.图2是本发明的另一种维修模仿训练平台的交流设备的基本结构图。
24.图3是本发明的维修模仿训练平台的交流设备的部分结构图。
具体实施方式
25.下面将结合附图和实施例对本发明做进一步地说明。
26.如图1-图3所示,维修模仿训练平台,包括:
27.承载框5、虚拟风门开合执行设备2、风门开合度操控设备、运动套设备3,所述承载框5上设有电力操作箱4与给电设备;所述虚拟风门开合执行设备2设在所述承载框5上;所述虚拟风门开合执行设备2设在所述电力操作箱4中,且同所述虚拟风门开合执行设备2相连,用来操纵所述所述虚拟风门开合执行设备2运作;所述运动套设备3设在所述承载框5上,用来同所述给电设备与风门开合度操控设备相连,关键用来执行信息传递训练。所述虚拟风门开合执行设备2为控制器或者单片机。
28.本发明给出的维修模仿训练平台,经由在承载框5上设有电力操作箱4、给电设备、虚拟风门开合执行设备2、风门开合度操控设备与运动套设备3,把电控风门组件化,依据实际电控风门的风门开合架构体系与风门开合度操控设备,因此能体验感很佳的受训掌握风门开合度操控设备的物理架构,虚拟实际电控风门风门开合运行操纵系统,并还能虚拟电控风门异常诱发与消除异常流程,受训期间还能人工操纵风门开合度操控设备的连接电缆的训练。
29.详细而言,本发明给出的维修模仿训练平台,其带有与实际电控风门一样的性能,能达成所有和风门开合有关的运行操纵及异常设置与检修性能,达成整体的虚拟训练性能。
30.在本发明内,进一步的,所述风门开合度操控设备包含安设块24、牵引马达22、用于风门开合的回转支承23、线性接近传感器27、角位移传感器25与顶板26;所述牵引马达22设在所述安设块24上,且同所述虚拟风门开合执行设备相连,另外所述牵引马达22和所述用于风门开合的回转支承23相连,用来牵引所述用于风门开合的回转支承23旋动;
31.所述顶板26设在所述用于风门开合的回转支承23上,用来与线性接近传感器27相接触,构造为线性接近传感器27的接触组件,所述线性接近传感器27设在所述安设块24上,且同所述虚拟风门开合执行设备相连;所述角位移传感器25设在所述安设块24上,且同所述用于风门开合的回转支承23旋接,另外所述角位移传感器25与所述虚拟风门开合执行设备相连,用来把采集到的所述用于风门开合的回转支承23的旋动速度与旋动弧度传递到所述虚拟风门开合执行设备。
32.进一步的,所述用于风门开合的回转支承23的外环固连在所述安设块24上,所述用于风门开合的回转支承23的内环和所述牵引马达22的转杆相连,所述角位移传感器25的转子和所述用于风门开合的回转支承23的内环相连,所述顶板26和所述用于风门开合的回转支承23的内环的内表面相连;
33.所述维修模仿训练平台还包含保护壳28,所述保护壳28和所述用于风门开合的回转支承23的内环相连,保护壳28伴着用于风门开合的回转支承23的旋动而旋动,用保护壳28替代风门开合执行训练,改善了训练时的可靠性。
34.在本发明内,进一步的,所述线性接近传感器27包含线性接近传感器一与线性接近传感器二,所述线性接近传感器一与所述线性接近传感器二都设在所述安设块24上;
35.进一步的,在所述用于风门开合的回转支承23旋动事先设定的弧度一时所述顶板26和所述线性接近传感器一相接;或者在所述用于风门开合的回转支承23旋动事先设定的弧度二时所述顶板26和所述线性接近传感器二相接。
36.在本发明内,线性接近传感器一与线性接近传感器二的运用,线性接近传感器一能在π/2(事先设定的弧度一)条件下止位用,在线性接近传感器一相接至顶板26后,线性接近传感器一里的动触点接通,送出电平数据到虚拟风门开合执行设备,构成首轮止位,若在线性接近传感器一无用后,线性接近传感器二就归于备份线性接近传感器能在2π/3(事先设定的弧度二),构成临界区的线性接近传感器。
37.在本发明内,进一步的,所述给电设备是电瓶,且所述电瓶经由电池箱5设在所述承载框5上;自然,给电设备还能接通交流市电来给为电力操作箱4、虚拟风门开合执行设备2、运动套设备3给电。
38.进一步的,所述虚拟风门开合执行设备2的个数为3,毗邻所述虚拟风门开合执行设备2间的弧度是2π/3。
39.详细的,本发明给出的维修模仿训练平台运作时,风门开合度操控设备依据不一样的条件,操纵牵引马达22的运作状态,牵引马达22经由蜗轮同用于风门开合的回转支承23内环咬合合,牵引用于风门开合的回转支承23内环旋动,以此达成风门(保护壳28)的风门开合,另外角位移传感器25即时反馈风门的旋动速度与旋动弧度,还有就是,在顶板26碰到线性接近传感器27时,线性接近传感器27把电瓶数据传递到风门开合度操控设备,风门开合度操控设备操纵牵引马达22终止运作,达成线性接近传感器27约束风门开合临界区。
40.本发明给出的维修模仿训练平台,经由在承载框上设置电力操作箱、给电设备、虚拟风门开合执行设备、风门开合度操控设备和运动套设备,依据实际电控风门的风门开合架构与风门开合度操控设备,因此能体验感不错得到的受训风门开合度操控设备的物理架构,虚拟实际电控风门开合运行操纵装置,而且还能虚拟电控风门异常诱发与消除异常流程,受训期间还能人工操作风门开合度操控设备的连接电缆的训练,利于对电控风门的受训。
41.一种维修模仿训练平台的训练方法,包括:
42.维修模仿训练平台运作时,风门开合度操控设备依据不一样的条件,操纵牵引马达22的运作状态,牵引马达22经由蜗轮同用于风门开合的回转支承23内环咬合合,牵引用于风门开合的回转支承23内环旋动,以此达成风门(保护壳28)的风门开合,另外角位移传感器25即时反馈风门的旋动速度与旋动弧度,还有就是,在顶板26碰到线性接近传感器27
时,线性接近传感器27把电瓶数据传递到风门开合度操控设备,风门开合度操控设备操纵牵引马达22终止运作,达成线性接近传感器27约束风门开合临界区。
43.本发明给出的维修模仿训练平台,经由在承载框上设置电力操作箱、给电设备、虚拟风门开合执行设备、风门开合度操控设备和运动套设备,依据实际电控风门的风门开合架构与风门开合度操控设备,因此能体验感不错得到的受训风门开合度操控设备的物理架构,虚拟实际电控风门开合运行操纵装置,而且还能虚拟电控风门异常诱发与消除异常流程,受训期间还能人工操作风门开合度操控设备的连接电缆的训练,利于对电控风门的受训。
44.以上以用实施例说明的方式对本发明作了描述,本领域的技术人员显而易见的是,本公开不限于以上描述的实施例,在不偏离本发明的范围的状态下,能够做出各种变动、改变和替换。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。