1.本发明涉及教学机器人技术领域,具体为一种便携式多功能教学机器人多级防摔系数检测实验装置。
背景技术:
2.随着人工智能技术、计算机技术等相关技术的发展、对智能机器人的研究越来越多。各类机器人相应走上社会的舞台,机器人也被应用在各个方面,在教育领域,许多学院已在学生中开设了机器人学方面的有关课程。为了满足机器人学方面的有关课程教学示范和实验教学的需求,通常需要有便携式的展示机器人。
3.在教学机器人的生产过程中,往往需要对教学机器人进行多级防摔系数检测,现有检测方式简单,通过将机器人固定在高处,然后控制机器人进行自由落体运动,通过摄像头和后续对摔落机器人的检查判定机器人的防摔系数,由于检测设备高度有限,从而导致教学机器人多级防摔系数的检测最大高度受限于检测设备的高度,且在检测过程中,机器人下落中,其本体往往会发生一定旋转,从而导致落地时的着力点不受控制,进而影响教学机器人的检测的准确性。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种便携式多功能教学机器人多级防摔系数检测实验装置,具备通过控制撞击板和教学机器人的接触速度,实现控制摔落高度的控制,控制教学机器人固定,撞击板运动,从而实现教学机器人多级防摔系数检测,且检测高度的设定不受设备高度限制,落地撞击着力点可控,提高检测的准确性的优点。
5.为实现上述目的,本发明提供如下技术方案:一种便携式多功能教学机器人多级防摔系数检测实验装置,包括实验架、导向滑轨、升降框、撞击板、透明门、驱动底座、驱动组件、内轴杆、外链轮、限位销、限位弹簧、电磁块、限位槽、传动链、动力驱动机构、夹持臂、伸缩杆、夹持弹簧、夹持横杆、防滑片、连接杆、夹紧齿杆、调控齿轮、动力齿轮、感应齿杆、定位块、档位块、档位弹簧、感应拨杆、感控弹簧、上拨组件、固定套杆、活动拨头、拨块弹簧、顶片、顶位弹簧、电触块、摄像头。
6.上述各结构的位置及连接关系如下:
7.所述实验架安装板的一侧固定连接有导向滑轨,导向滑轨的外部滑动连接有升降框,升降框的底部固定连接有驱动底座,驱动底座的内部固定连接有驱动组件,导向滑轨的内部活动连接有传动链,传动链的外部设置用于驱动传动链的动力驱动机构,所述实验架和升降框的内部均固定连接有摄像头;
8.所述实验架位于导向滑轨的同侧铰接有夹持臂,夹持臂的外部铰接有连接杆,连接杆的另一端铰接有夹紧齿杆,夹紧齿杆的外部啮合连接有调控齿轮,调控齿轮的外部固定连接有动力齿轮,动力齿轮的外部啮合连接有感应齿杆,感应齿杆的外部活动连接有感应拨杆,感应拨杆和感应齿杆之间设置有感控弹簧,所述夹紧齿杆和连接杆通过销轴铰接,
销轴贯穿实验架安装板,夹紧齿杆、调控齿轮、动力齿轮、感应齿杆与导向滑轨、升降框分别位于实验架安装板的两侧,所述实验架安装板位于导向滑轨一侧刻画有撞击线,撞击线位置低于夹持臂的最低点。
9.优选的,所述升降框的内底部固定连接有撞击板,升降框的正面铰接有透明门。
10.优选的,所述驱动组件包括内轴杆,所述内轴杆和驱动底座固定连接,内轴杆的外部卡接有外链轮,所述外链轮和传动链啮合连接。
11.优选的,所述夹持臂的内部活动连接有伸缩杆,伸缩杆和夹持臂之间设置有夹持弹簧,伸缩杆的外侧端固定连接有夹持横杆,夹持横杆的外部固定连接有防滑片。
12.优选的,所述伸缩杆和夹持横杆设置有三组,伸缩杆和夹持横杆构成“t”字形,防滑片固定连接在三组夹持横杆的外部。
13.优选的,所述感应齿杆的外部固定连接有定位块,定位块的外部活动连接有档位块,档位块活动连接在实验架的内部,档位块和实验架之间设置有档位弹簧,档位块设置有两组,两组档位块呈上下分布。
14.优选的,所述感应拨杆贯穿实验架的安装板,所述升降框的内部固定连接有上拨组件,上拨组件包括和升降框固定连接的固定套杆,固定套杆的内部滑动套接有活动拨头,活动拨头和固定套杆之间设置有拨块弹簧,所述活动拨头和感应拨杆突出的活动端活动连接,活动拨头可带动感应拨杆向上移动。
15.优选的,所述内轴杆的内部活动连接有限位销,限位销和内轴杆的之间设置有限位弹簧,内轴杆的内部固定连接有电磁块,外链轮的内侧开设有限位槽。
16.优选的,所述限位销和电磁块分别位于限位弹簧的两侧,且限位销的内侧端设置为永磁铁,在电磁块通电时,电磁块与永磁铁同性磁极相接,限位销与限位槽活动卡接。
17.优选的,所述活动拨头的顶侧活动连接有顶片,顶片和活动拨头之间设置有顶位弹簧,顶片和活动拨头之间设置有电触块,在顶片位于活动拨头顶侧位置时,电触块处于连通状态,在顶片下压至活动拨头的底部时,电触块处于断联状态,所述电触块和电磁块电连接。
18.有益效果:
19.1、该便携式多功能教学机器人多级防摔系数检测实验装置,通过夹持臂夹持教学机器人,夹持臂的三组夹持横杆分别弹性连接在夹持臂的内部,从而通过夹持横杆之间的相互配合,有效适应教学机器人的多元形状,保证夹持效果,且夹持横杆在夹持教学机器人过程中,使防滑片和教学机器人紧密接触,进一步防止教学机器人滑落,保证夹持的稳定,同时控制教学机器人的撞击点位于固定状态的最下侧,便于调节教学机器人的撞击点,提高防摔检测的可控性,进而提高防摔检测的准确性。
20.2、该便携式多功能教学机器人多级防摔系数检测实验装置,通过控制升降框的上升速度,达到调节撞击板与教学机器人接触的瞬时速度,从而完成模拟不同高度教学机器人跌落状态的实验,避免检测设备高度对检测高度的限制,且有效减少实验设备的体积,提高该装置的实用性,同时提高教学机器人多级检测的准确性。
21.3、该便携式多功能教学机器人多级防摔系数检测实验装置,升降框向上移动过程中,上拨组件接触感应拨杆,则升降框继续向上移动带动感应拨杆向上移动,感应拨杆带动感应齿杆向上移动,使夹持臂反向偏转,松开教学机器人,使撞击板到达撞击线位置时,教
学机器人完全脱离夹持,从而有效保证教学机器人在跌落时,没有外力干扰,消除干扰因数,进而有效保证实验的准确性。
22.4、该便携式多功能教学机器人多级防摔系数检测实验装置,通过定位块的外部活动连接有档位块,使感应齿杆在上升到最大过程和夹紧教学机器人时,感应齿杆均通过定位块与两组档位块分别卡接,使夹持臂保持夹紧或完全张开的状态,进而提高夹持臂的使用效果,减少夹持臂对实验过程的干扰。
23.5、该便携式多功能教学机器人多级防摔系数检测实验装置,当活动拨头与感应拨杆接触时,感应拨杆下压顶片,顶片使电触块断连,则内轴杆内部电磁块断电,从而使限位销与限位槽的卡紧作用力降低,则在传动链转动过程中,传动链带动外链轮转动,失去对驱动底座的向上推力,从而完成撞击板的减速控制,不仅降低对速度调节控制的难度,使动力驱动机构驱动传动链始终以最终速度转动,使传动链能够带动外链轮转动,升降框失去外推力而降速,且在升降框达到顶部位置时,自然停止,避免动力驱动机构骤停的麻烦,从而减少对动力驱动机构的影响。
附图说明
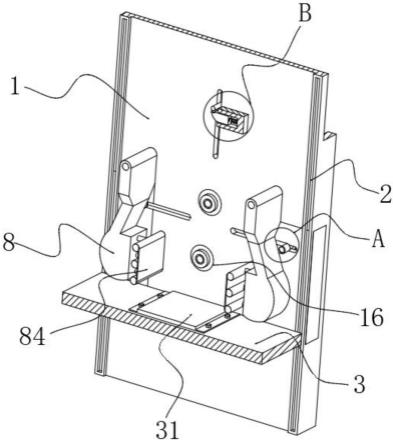
24.图1为本发明结构实验架安装板正面示意图;
25.图2为本发明结构实验架安装板背面示意图;
26.图3为本发明结构动力驱动机构与传动链连接示意图;
27.图4为本发明结构传动链与外链轮示意图;
28.图5为本发明结构升降框示意图;
29.图6为本发明结构夹持臂剖视示意图;
30.图7为本发明结构图1的a部分放大示意图;
31.图8为本发明结构图1的b部分放大示意图;
32.图9为本发明结构顶片与活动拨头连接示意图;
33.图10为本发明结构图4的c部分放大示意图。
34.图中:1、实验架;2、导向滑轨;3、升降框;31、撞击板;32、透明门;4、驱动底座;5、驱动组件;51、内轴杆;52、外链轮;53、限位销;54、限位弹簧;55、电磁块;56、限位槽;6、传动链;7、动力驱动机构;8、夹持臂;81、伸缩杆;82、夹持弹簧;83、夹持横杆;84、防滑片;9、连接杆;10、夹紧齿杆;11、调控齿轮;12、动力齿轮;13、感应齿杆;131、定位块;132、档位块;133、档位弹簧;14、感应拨杆;141、感控弹簧;15、上拨组件;151、固定套杆;152、活动拨头;153、拨块弹簧;1521、顶片;1522、顶位弹簧;1523、电触块;16、摄像头。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.实施例一
37.请参阅图1-7,一种便携式多功能教学机器人多级防摔系数检测实验装置,包括实
验架1,实验架1安装板的一侧固定连接有导向滑轨2,导向滑轨2的外部滑动连接有升降框3,升降框3的底部固定连接有驱动底座4,驱动底座4的内部固定连接有驱动组件5,导向滑轨2的内部活动连接有传动链6,传动链6的外部设置用于驱动传动链6的动力驱动机构7,实验架1和升降框3的内部均固定连接有摄像头16;
38.实验架1位于导向滑轨2的同侧铰接有夹持臂8,实验架1安装板位于导向滑轨2一侧刻画有撞击线,撞击线位置低于夹持臂8的最低点。
39.本实施例中,升降框3的内底部固定连接有撞击板31,升降框3的正面铰接有透明门32。
40.本实施例中,驱动组件5包括内轴杆51,内轴杆51和驱动底座4固定连接,内轴杆51的外部卡接有外链轮52,外链轮52和传动链6啮合连接。
41.本实施例中,夹持臂8的内部活动连接有伸缩杆81,伸缩杆81和夹持臂8之间设置有夹持弹簧82,伸缩杆81的外侧端固定连接有夹持横杆83,夹持横杆83的外部固定连接有防滑片84。
42.本实施例中,伸缩杆81和夹持横杆83设置有三组,伸缩杆81和夹持横杆83构成“t”字形,防滑片84固定连接在三组夹持横杆83的外部。
43.在进行测试时,需要对教学机器人进行固定,通过打开透明门32,方便将教学机器人固定在夹持臂8上,且通过透明门32,方便观察教学机器人在摔落实验时的过程。
44.夹持固定时,通过夹持臂8夹持教学机器人,夹持臂8的三组夹持横杆83分别弹性连接在夹持臂8的内部,从而通过夹持横杆83之间的相互配合,有效适应教学机器人的多元形状,保证夹持效果,且夹持横杆83在夹持教学机器人过程中,使防滑片84和教学机器人紧密接触,进一步防止教学机器人滑落,保证夹持的稳定,同时控制教学机器人的撞击点位于固定状态的最下侧,撞击点与撞击线处于同一水平位置。
45.实验时,计算不同高度机器人下落过程中,机器人到达撞击面的速度,设定为最终速度,通过控制动力驱动机构7,使动力驱动机构7带动传动链6转动,由于外链轮52和内轴杆51卡接,使外链轮52无法相对内轴杆51发生转动,且内轴杆51固定连接在驱动底座4的内部,从而在传动链6转动的过程中,传动链6带动外链轮52向上移动,则外链轮52通过内轴杆51和驱动底座4带动升降框3向上移动,且调节动力驱动机构7,使升降框3在向上移动过程中,当撞击板31和教学机器人接触前的速度达到最终速度,且后续过程保持匀速向上移动,当撞击板31达到撞击线高度时,撞击板31开始减速运动,从而使撞击板31与教学机器人接触的瞬时速度为最终设定速度,由于教学机器人在摔落实验过程中,其中不同高度的设定,最终改变因数为教学机器人与撞击面接触的最终速度,通过控制升降框3的上升速度,达到调节撞击板31与教学机器人接触的瞬时速度,从而完成模拟不同高度教学机器人跌落状态的实验,避免检测设备高度对检测高度的限制,且有效减少实验设备的体积,提高该装置的实用性,同时提高教学机器人多级检测的准确性。
46.本实施例中,夹持臂8的外部铰接有连接杆9,连接杆9的另一端铰接有夹紧齿杆10,夹紧齿杆10的外部啮合连接有调控齿轮11,调控齿轮11的外部固定连接有动力齿轮12,动力齿轮12的外部啮合连接有感应齿杆13,感应齿杆13的外部活动连接有感应拨杆14,感应拨杆14和感应齿杆13之间设置有感控弹簧141,夹紧齿杆10和连接杆9通过销轴铰接,销轴贯穿实验架1安装板,夹紧齿杆10、调控齿轮11、动力齿轮12、感应齿杆13与导向滑轨2、升
降框3分别位于实验架1安装板的两侧。
47.装夹过程为,通过控制感应齿杆13向下移动,感应齿杆13通过动力齿轮12带动调控齿轮11转动,调控齿轮11带动两组夹紧齿杆10相向移动,两组夹紧齿杆10通过连接杆9带动夹持臂8相互偏转,从而使夹持臂8夹紧教学机器人。
48.本实施例中,感应拨杆14贯穿实验架1的安装板,升降框3的内部固定连接有上拨组件15,上拨组件15包括和升降框3固定连接的固定套杆151,固定套杆151的内部滑动套接有活动拨头152,活动拨头152和固定套杆151之间设置有拨块弹簧153,活动拨头152和感应拨杆14突出的活动端活动连接,活动拨头152可带动感应拨杆14向上移动。
49.升降框3向上移动过程中,在撞击板31到达撞击线位置前2cm~3cm位置时,上拨组件15接触感应拨杆14,则升降框3继续向上移动带动感应拨杆14向上移动,感应拨杆14带动感应齿杆13向上移动,同理,夹持臂8反向偏转,松开教学机器人,使撞击板31到达撞击线位置时,教学机器人完全脱离夹持,从而有效保证教学机器人在跌落时,没有外力干扰,消除干扰因数,进而有效保证实验的准确性。
50.实施例二
51.请参阅图2,一种便携式多功能教学机器人多级防摔系数检测实验装置,包括实验架1,实验架1安装板的一侧固定连接有导向滑轨2,导向滑轨2的外部滑动连接有升降框3,升降框3的底部固定连接有驱动底座4,驱动底座4的内部固定连接有驱动组件5,导向滑轨2的内部活动连接有传动链6,传动链6的外部设置用于驱动传动链6的动力驱动机构7,实验架1和升降框3的内部均固定连接有摄像头16;
52.实验架1位于导向滑轨2的同侧铰接有夹持臂8,夹持臂8的外部铰接有连接杆9,连接杆9的另一端铰接有夹紧齿杆10,夹紧齿杆10的外部啮合连接有调控齿轮11,调控齿轮11的外部固定连接有动力齿轮12,动力齿轮12的外部啮合连接有感应齿杆13,感应齿杆13的外部活动连接有感应拨杆14,感应拨杆14和感应齿杆13之间设置有感控弹簧141,夹紧齿杆10和连接杆9通过销轴铰接,销轴贯穿实验架1安装板,夹紧齿杆10、调控齿轮11、动力齿轮12、感应齿杆13与导向滑轨2、升降框3分别位于实验架1安装板的两侧,实验架1安装板位于导向滑轨2一侧刻画有撞击线,撞击线位置低于夹持臂8的最低点。
53.本实施例中,感应齿杆13的外部固定连接有定位块131,定位块131的外部活动连接有档位块132,档位块132活动连接在实验架1的内部,档位块132和实验架1之间设置有档位弹簧133,档位块132设置有两组,两组档位块132呈上下分布。
54.与实施例一相比,使感应齿杆13在上升到最大过程和夹紧教学机器人时,感应齿杆13均通过定位块131与两组档位块132分别卡接,使夹持臂8保持夹紧或完全张开的状态,进而提高夹持臂8的使用效果,减少夹持臂8对实验过程的干扰。
55.实施例三
56.请参阅图8-10,在实施例一的基础上进一步的,内轴杆51的内部活动连接有限位销53,限位销53和内轴杆51的之间设置有限位弹簧54,内轴杆51的内部固定连接有电磁块55,外链轮52的内侧开设有限位槽56。
57.本实施例中,限位销53和电磁块55分别位于限位弹簧54的两侧,且限位销53的内侧端设置为永磁铁,在电磁块55通电时,电磁块55与永磁铁同性磁极相接,限位销53与限位槽56活动卡接。
58.本实施例中,活动拨头152的顶侧活动连接有顶片1521,顶片1521和活动拨头152之间设置有顶位弹簧1522,顶片1521和活动拨头152之间设置有电触块1523,在顶片1521位于活动拨头152顶侧位置时,电触块1523处于连通状态,在顶片1521下压至活动拨头152的底部时,电触块1523处于断联状态,电触块1523和电磁块55电连接。
59.当活动拨头152与感应拨杆14接触时,顶片1521与感应拨杆14接触,则感应拨杆14下压顶片1521,在顶片1521持续向下移动过程中,顶片1521使电触块1523断连,则内轴杆51内部电磁块55断电,从而使限位销53与限位槽56的卡紧作用力降低,则在传动链6转动过程中,传动链6带动外链轮52转动,失去对驱动底座4的向上推力,从而完成撞击板31的减速控制,不仅降低对速度调节控制的难度,使动力驱动机构7驱动传动链6始终以最终速度转动,则升降框3在撞击板31达到撞击线位置时,由于限位销53失去电磁块55的电磁推力,从而使传动链6能够带动外链轮52转动,升降框3失去外推力而降速,且在升降框3达到顶部位置时,自然停止,避免动力驱动机构7骤停的麻烦,从而减少对动力驱动机构7的影响。
60.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
