1.本发明属于车道保持辅助系统领域,具体是一种基于图像分析识别的车道保持辅助装置。
背景技术:
2.目前,车辆是“车”与车的单位“辆”的总称。所谓车,是指陆地上用轮子转动的交通工具;所谓辆,来源于古代对车的计量方法。那时的车一般是两个车轮,故车一乘即称一两,后来才写作辆。由此可见,车辆的本义是指本身没有动力的车,用马来牵引叫马车,用人来拉或推叫人力车。随着科学技术的发展,又有了用蒸汽机来牵引的汽车等等。这时车辆的概念已经悄悄起了变化,成为所有车的统称。比如,交通管理部门统计的城市车辆数,报刊上报道的发生多少车辆交通事故等。这里的车辆泛指所有的车。
3.现有的,在车辆在行驶过程中还可以选择装配车道保持辅助系统,该车道保持辅助系统属于智能驾驶辅助系统中的一种,它可以在车道偏离预警系统的基础上对转向系统进行控制辅助车辆保持在本车道内行驶;对车辆行驶时借助一个摄像头识别行驶车道的标识线将车辆保持在车道上提供支持;如果车辆接近识别到的标记线并可能脱离行驶车道,那么会通过方向盘的振动,或者是声音来提请驾驶员注意。
4.但本技术发明人在实现本技术实施例中的技术方案的过程中,发现上述技术至少存在如下技术问题:
5.传统的车道保持系统应用到高速路面行驶的车辆时,长时间的驾驶会导致驾驶员出现疲劳的情况,此时车辆的方向盘会出现偏转的情况,此处的偏转为方向盘轻微转动,使得车辆持续远离车道中心,并非人为变道操作,同时传统的车道保持系统造价过高,警示效果不够显著。
技术实现要素:
6.解决的技术问题
7.针对现有技术的不足,本发明提供了一种基于图像分析识别的车道保持辅助装置,解决现有背景技术中提到的问题。
8.技术方案
9.为实现以上目的,本发明通过以下技术方案予以实现:
10.一种基于图像分析识别的车道保持辅助装置,包括:
11.助力模块,包含转向轴、传动轴、若干车轮、用于对助力模块供电的电动机以及用于操控助力模块的ecu;
12.图像处理模块,设置到转向轴表面;
13.测距模块,固定设置到车壳内壁,用于测量车身与路边护栏的间距;
14.驱动模块,安装于转向轴一侧,用于带动所述转向轴转动;
15.处理模块,安装于车架内,并分别与驱动模块、图像处理模块以及测距模块电性连
接。
16.进一步的,所述助力模块还包括装配到转向轴表面的扭矩传感器,且扭矩传感器与ecu之间通过导线连接,所述传动轴与转向轴之间通过设置转向器连接。
17.通过采用上述技术方案:该处的扭矩传感器可将扭矩信息传递到ecu内,同时对车辆离合器的转角信息以及电动机的电流信息均传递到ecu内。
18.进一步的,所述转向轴的顶端安装有方向盘,且方向盘的表面嵌入式安装有若干调控按钮,并在方向盘的中部安装扬声器,所述扬声器与处理模块之间通过数据线连接。
19.通过采用上述技术方案:车道显示灯将车道图像投影到车前挡风玻璃上,使得车道投影与路面的车道线重合,则表示其所处位置并未发生偏移,若是车道投影与路面的车道线发生交叉,交叉的角度超过预设的度数,此时车道投影的灯光颜色由绿变红,起到警示作用。
20.进一步的,所述图像处理模块包含立板、嵌设于立板表面的车道显示灯和图像采集器以及固定设置到立板底侧的若干吸盘;
21.其中,所述立板通过吸盘吸附于车体上;
22.所述车道显示灯用于将车道图像投影到车前挡风玻璃上;
23.所述图像采集器用于采集车辆前方的图像信息。
24.通过采用上述技术方案:在进行装配时,若干吸盘可吸附到方向盘前侧位置的台面上,从而保证立板位置的稳固。
25.进一步的,所述转向轴的表面转动式装配有轴承件,且轴承件与立板之间通过连接板连接。
26.通过采用上述技术方案:在转向轴发生偏转时,轴承件本身不会发生偏转。
27.进一步的,所述测距模块包含若干测距传感器,各个所述测距传感器通过螺丝固定于车身内壁,并与各个车轮位置对应。
28.通过采用上述技术方案:各个测距传感器可进行如图1所示方向上的测距,测距传感器测量得到车身与道路两侧护栏的间距,通过间距测量也能测到车辆是否偏移轨迹,该方式是针对道路上并不存在车道线的情况下进行使用的。
29.进一步的,所述驱动模块包含驱动电机、设置于驱动电机输出端上的驱动齿以及固定套装到转向轴表面的从动齿。
30.通过采用上述技术方案:若是车辆发生偏移,则驱动电机收到分控器的指令,使得驱动电机带动驱动齿进行转动,在驱动齿和从动齿的齿合作用下,使得从动齿能够带动整个转向轴进行偏转,以确保车辆能够恢复到原直线轨迹上。
31.进一步的,所述从动齿的截面呈“工”字形,且从动齿与驱动齿相互齿合。
32.进一步的,所述处理模块包含分控器,该分控器安装到车载显示屏的背侧,且分控器内设有分析单元。
33.进一步的,所述分析单元用于分析处理图像处理模块所采集的图像信息和测距模块所测得的距离信息,该处的图像信息为道路上前方车辆的图像信息以及前方路面信息。
34.综上所述,本发明包括以下至少一种有益技术效果:
35.一是,采用了驱动模块,并搭配单个分控器进行单独控制,在车辆进行行驶的过程中,驱动模块能够根据车辆的偏航情况进行自动调节方向盘,避免在高速公路上由于驾驶
员疲劳或分神,造成车辆偏移的情况,在一定程度上保证了车辆在行驶过程中的安全性,同时驱动模块中仅使用单个驱动电机和齿轮组,使得整个辅助装置造成成本降低,使用效果也能得到保障;
36.二是,在转向轴上装配图像处理模块,利用转向轴对图像处理模块初步定位,而后借助若干吸盘使得立板位置固定,车道显示灯能够将车道轨迹实时投影到车前挡风玻璃上,车道轨迹颜色的变化和扬声器能够完成对驾驶员的警示作用。
附图说明
37.图1是本发明的助力模块具体结构图;
38.图2是本发明的方向盘结构示意图;
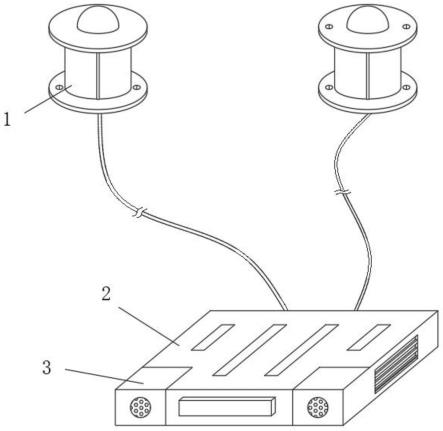
39.图3是本发明的图像处理模块示意图;
40.图4是本发明的图1局部结构a的放大图;
41.图5是本发明的模块连接示意图。
42.附图标记:1、转向轴;2、转向器;3、电动机;4、ecu;5、扭矩传感器;6、方向盘;7、测距传感器;8、分控器;9、轴承件;10、调控按钮;11、扬声器;12、立板;13、车道显示灯;14、图像采集器;15、吸盘;16、驱动齿;17、从动齿;18、驱动电机。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。此外,下文为了描述方便,所引用的“上”、“下”、“左”、“右”等于附图本身的上、下、左、右等方向一致,下文中的“第一”、“第二”等为描述上加以区分,并没有其他特殊含义。
44.实施例1:
45.本实施例给出整个辅助装置的具体结构,如图1-4所示,一种基于图像分析识别的车道保持辅助装置,包括:助力模块,包含转向轴1、传动轴、若干车轮、用于对助力模块供电的电动机3以及用于操控助力模块的ecu4;图像处理模块,设置到转向轴1表面;测距模块,固定设置到车壳内壁,用于测量车身与路边护栏的间距;驱动模块,安装于转向轴1一侧,用于带动转向轴1转动;处理模块,安装于车架内,并分别与驱动模块、图像处理模块以及测距模块电性连接。
46.在一些示例中,助力模块还包括装配到转向轴1表面的扭矩传感器5,且扭矩传感器5与ecu4之间通过导线连接,传动轴与转向轴1之间通过设置转向器2连接;转向轴1的顶端安装有方向盘6,且方向盘6的表面嵌入式安装有若干调控按钮10,并在方向盘6的中部安装扬声器11,扬声器11与处理模块之间通过数据线连接。
47.在一些示例中,驱动模块包含驱动电机18、设置于驱动电机18输出端上的驱动齿16以及固定套装到转向轴1表面的从动齿17;其中,从动齿17的截面呈“工”字形,且从动齿17与驱动齿16相互齿合,该处从动齿17的边侧形成凹槽,能够同时完成对驱动齿16的限位。
48.处理模块包含分控器8,该分控器8安装到车载显示屏的背侧,且分控器8内设有分
析单元。
49.分析单元用于分析处理图像处理模块所采集的图像信息和测距模块所测得的距离信息,该分析单元为分控器8内设的程序,分控器8可采用型号为plc226控制面板。
50.通过采用上述技术方案:
51.采用了驱动模块,并搭配单个分控器8进行单独控制,在车辆进行行驶的过程中,驱动模块能够根据车辆的偏航情况进行自动调节方向盘6,避免在高速公路上由于驾驶员疲劳或分神,造成车辆偏移的情况,在一定程度上保证了车辆在行驶过程中的安全性;同时驱动模块中仅使用单个驱动电机18和齿轮组,使得整个辅助装置造成成本降低,使用效果也能得到保障。
52.实施例2:
53.本实施例给出图像处理模块的具体结构,如图1和3所示,图像处理模块,设置到转向轴1表面。
54.在一些示例中,图像处理模块包含立板12、嵌设于立板12表面的车道显示灯13和图像采集器14以及固定设置到立板12底侧的若干吸盘15;
55.其中,立板12通过吸盘15吸附于车体上;
56.车道显示灯13用于将车道图像投影到车前挡风玻璃上;
57.图像采集器14用于采集车辆前方的图像信息;转向轴1的表面转动式装配有轴承件9,且轴承件9与立板12之间通过连接板连接。
58.通过采用上述技术方案:
59.在转向轴1上装配图像处理模块,利用转向轴1对图像处理模块初步定位,而后借助若干吸盘15使得立板12位置固定,车道显示灯13能够将车道轨迹实时投影到车前挡风玻璃上,车道轨迹颜色的变化和扬声器11能够完成对驾驶员的警示作用。
60.实施例3:
61.本实施例不同于实施例1,给出了测距模块的具体结构,如图1和3所示,测距模块包含若干测距传感器7,各个测距传感器7通过螺丝固定于车身内壁,并与各个车轮位置对应。
62.在具体应用场景中,
63.在测距传感器7检测到车体与道路边侧的护栏间距超过预设值,则判定车辆发生偏移,若是确定车辆发生偏移,则驱动电机18收到分控器8的指令,使得驱动电机18带动驱动齿16进行转动,在驱动齿16和从动齿17的齿合作用下,使得从动齿能够带动整个转向轴1进行偏转,以确保车辆能够恢复到原直线轨迹上。
64.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。