1.本发明属于自动驾驶车联网络(autonomous vehicular networks,avns)领域,尤其涉及一种自动驾驶车联网络中无人机辅助的数据验证系统及方法。
背景技术:
2.作为智能物联网(internet ofthings,iot)时代最具活力和活力的领域之一,自动驾驶车联网络将在未来的智能交通系统(intelligenttransportation systems,itss)中发挥重要作用,并具有改变人类社会面貌的巨大潜力。自动驾驶车联网络具有减少交通事故、缩短平均通勤时间、减少二氧化碳排放、改善出行体验等一系列优点。因此,自动驾驶车联网络的前景被广泛看好。为了实现自动驾驶车辆(autonomousvehicles,avs)的实际应用,每辆自动驾驶汽车的驾驶安全都备受关注。具体来说,合理利用和分析大量的周围交通数据(如道路拥堵、行人数量和前后方车辆的行驶速度等)能够保证自动驾驶汽车的安全。然而,由于车载传感器的传感范围有限,自动驾驶系统很难及时或事先收集感知距离以外的交通数据。此外,部署传感基础设施(如路边监控单元)成本高,需要大量资源(如带宽、计算和能源等)。而近年来,无人机(unmannedaerialvehicle,uav)因其低成本、易部署等优点被广泛用来监控地面交通。无人机不仅可以随着交通环境的变化而灵活部署,而且可以实现实时、大范围的交通感知。因此,在自动驾驶车联网络中应用无人机辅助的交通感知是非常有前景的。
3.然而,无人机辅助交通感知在自动驾驶车联网络中的大规模应用面临一些挑战。具体来说,无人机感知的质量和行为都极大影响了自动驾驶的决策。一方面,由于无人机具有不同的感知能力,感知能力较差的无人机会产生和提供较低质量的交通感知数据,这会大大降低无人机对交通状况判断的准确性。另一方面,由于任意的无人机都可以参与到数据感知中来,一些恶意的无人机会进行不诚实的感知行为,伪造和产生虚假的感知数据。因此,自动驾驶汽车可能会受到损害,在自动驾驶方面做出错误的决定,甚至引发交通事故(例如,由于不正确的车辆距离信息导致的追尾事故)。所以,在将传感数据传送到自动驾驶车辆之前,有必要对其有效性和真实性验证。
技术实现要素:
4.针对现有基于自动驾驶车联网络的无人机协同感知系统中存在的缺陷,为了降低应用无人机感知的不良数据带来的风险,提高自动驾驶车联网络的安全性,实现更加精准的自动驾驶,本发明的目的是提供一种自动驾驶车联网络中无人机辅助的数据验证系统及方法。
5.为达到上述目的,本发明采用如下技术方案:
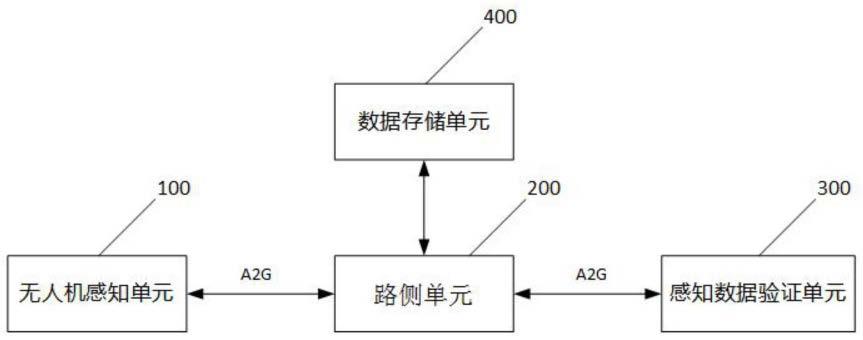
6.一种自动驾驶车联网络中无人机辅助的数据验证系统,包括无人机感知单元、路侧单元 (roadside unit,rsu)、感知数据验证单元,数据存储单元。所述无人机感知单元通过空对地通信(air to ground,a2g)方式与路侧单元连接;所述感知数据验证单元通过a2g
方式与路侧单元相连;所述数据存储单元与路侧单元相连。其中,无人机感知单元负责为自动驾驶车联网络感知数据,包括路况信息、异常车辆信息等。在此,无人机感知单元的感知数据在上传至车联网络前,需要进行验证。为了实现感知数据验证,无人机感知单元需要将待验证感知数据通过a2g信道传送至路侧单元,同时发布验证任务;所述路侧单元被均匀部署在道路两旁,通过a2g信道收集无人机感知单元递交的感知数据以及验证任务,并招募验证无人机来完成验证任务;所述感知数据验证单元由验证无人机组成,负责完成验证任务,以判断感知数据是否正确;所述数据存储单元用来存储感知数据,验证信息等,其由路侧单元维护。
7.一种自动驾驶车联网络中无人机辅助的数据验证方法,包括以下步骤:
8.s100.感知无人机感知自动驾驶车联网络中的路况信息、异常车辆信息,并根据感知信息的复杂度、重要性在路侧单元上发布相应的验证任务;
9.s200.路侧单元接收验证任务,招募验证无人机协作完成验证任务,以判断无人机感知数据是否正确;
10.s300.验证无人机在收到验证任务之后,首先验证其格式,然后根据验证算法对感知数据进行验证;
11.s400.路侧单元接收和汇总验证无人机反馈的验证结果,分析以得到无人机感知数据的最终验证结果。并将最终验证结果通过a2g信道反馈给感知无人机;
12.s500.路侧单元负责将感知数据、验证结果等信息上传至数据存储单元。
13.所述步骤s200的具体步骤为:
14.s210.路侧单元接收验证任务,并将验证任务添加到任务面板中;
15.s220.路侧单元之间实时通信以同步更新任务面板,供各处的验证无人机查阅;
16.s230.验证无人机查阅任务面板,向路侧单元请求验证任务;
17.s240.路侧单元在确认验证无人机的身份和验证任务的状态之后,向请求任务的无人机发放验证任务;
18.所述步骤s500的具体步骤为:
19.s510.路侧单元将感知数据和验证结果等信息打包为一个验证任务包,广播给其他的路侧单元;
20.s520.所有合法注册过的路侧单元和无人机投票选出的一个路侧单元作为超级节点,来负责一段时间内的数据整合存储工作。
21.s530.超级节点收集和整理各地路侧单元广播的验证任务包,计算并更新无人机的信誉和路侧单元的信用,并将验证任务包,信誉和信用整合打包为一个待验证区块,并广播给所有的路侧单元验证。
22.s540.超级节点在收到超过2/3的路侧单元认可意见后,将这一区块加入到区块链末尾,并链上前一个区块,以完成数据存储。
23.与现有技术相比,本发明具有如下突出的实质性特点和显著优点:
24.(1)引入了无人机来参与自动驾驶车联网络的数据感知,利用无人机独特的高空视角可以迅速感知大范围的道路及周围车辆状态,以实现安全自动驾驶。
25.(2)考虑到感知出错现象和恶意感知无人机的出现,为无人机感知自动驾驶车联网络系统设计了一种无人机辅助的数据验证方法,降低了感知错误率,并抑制了恶意无人
机的行为。
26.(3)利用区块链存储感知数据和验证结果等信息,防止在数据存储和转发过程中被恶意篡改,有效地提高了数据存储的效率,并利于相关部门追溯感知数据。
27.(4)结合无人机和路测单元过去的行为,设计的信誉和信用机制,有效地激励了无人机参与数据验证,以及路测单元参与验证任务管理。
附图说明
28.为了更清楚地说明本发明具体实施方式中的技术方案,下面将对具体实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
29.图1为本发明中自动驾驶车联网络中无人机辅助的数据验证系统的示意图。
30.图2为本发明中自动驾驶车联网络中无人机辅助的数据验证方法的示意图。
31.图3为图2中步骤s200的具体流程图。
32.图4为图2中步骤s500的具体流程图。
具体实施方式
33.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.实施例一
35.一种自动驾驶车联网络中无人机辅助的数据验证系统,包括无人机感知单元100,路侧单元200,感知数据验证单元300,数据存储单元400;所述无人机感知单元100通过空对地通信方式与路侧单元200连接;所述感知数据验证单元300通过空对地通信方式与路侧单元 200连接;所述数据存储单元400与路侧单元200相连;所述无人机感知单元100用于感知路况信息、异常车辆信息;所述路侧单元200用于收集和管理验证任务,以及承担数据存储任务;所述感知数据验证单元300用于验证感知信息;所述数据存储单元400用于存储感知数据对应的验证信息,以及评判验证无人机感知单元100和路侧单元200行为的信誉和信用值。
36.本实施例系统降低应用无人机感知的不良数据带来的风险,提高自动驾驶车联网络的安全性,实现更加精准的自动驾驶性,能实现更加精准的自动驾驶。
37.实施例二
38.作为本发明的某一具体实施方式,如图1所示,一种自动驾驶车联网络中无人机辅助的数据验证系统,包括无人机感知单元100,路侧单元200,感知数据验证单元300,数据存储单元400;所述无人机感知单元100通过空对地通信方式与路侧单元200连接;所述感知数据验证单元300通过a2g方式与路侧单元200相连;所述数据存储单元400与路侧单元200 相连。
39.无人机感知单元100用于感知路况信息,异常车辆信息等。感知的主体在avns注册
过的感知无人机。在感知到信息之后,无人机要想共享这些感知数据,需要先进行数据验证。而数据验证需要雇佣一定数量的验证无人机来完成,因此感知无人机需要先发布验证任务至临近的路侧单元200。
40.路侧单元200用于收集和管理验证任务。在收到感知无人机验证任务之后,路侧单元200 会将其添加至任务面板中,同时路侧单元之间会实时同步更新任务面板,以确保各个验证无人机都能够通过临近的路侧单元200收到更新的验证任务。路侧单元200也需要招募验证无人机完成验证任务,给与验证无人机相应的报酬。在验证无人机完成验证任务之后,路侧单元200汇总各个验证无人机的验证结果,并反馈给感知无人机以授权共享。另外,在完成上述工作后,路侧单元需要将感知数据和验证结果打包加密广播,被选中作为超级节点的路侧单元还需要承担数据存储任务。
41.感知数据验证单元300用于验证感知信息。验证的主体是在avns注册过的验证无人机。验证无人机可以向路侧单元200请求验证任务,在经过路侧单元审核后,路侧单元即向验证无人机发放验证任务。验证无人机需要妥善的完成验证任务,因为这会对它的信誉和报酬产生影响。
42.数据存储单元400用来存储感知数据对应的验证信息,以及评判验证无人机和路侧单元行为的信誉和信用值等。数据存储单元400的主体是区块链,而区块链由路侧单元维护。
43.自动驾驶车联网络中的无人机包含两种,感知无人机和验证无人机。用 m={1,
…
,m,
…
,m}表示无人机的集合,s={1,
…
,s,
…
,s}表示感知无人机的集合, v={1,
…
,v,
…
,v}表示验证无人机的集合,其满足s∪v=m。路侧单元200即路侧单元的集合用k={1,
…
,k,
…
,k}表示,无人机m覆盖的a2g范围是一个半径为的圆。
44.为了对无人机和路侧单元进行有效的管理,无人机和路侧单元在参与感知任务或验证任务之前,都会在证书颁发机构(certification authority,ca)上注册其真实身份,如交通监管中心颁发的唯一车辆识别号。然后,每个无人机m∈m和路侧单元k∈k获得它们的非对称私钥/公钥对{pkm,skm}和{pkk,skk},并获得证书。该证书可以确保无人机可以安全地在网络上交换数据,并验证对方的身份。无人机证书表示为:
45.certm={idm,pkm,sig
ca
(
·
)}
46.其中,idm为无人机m的唯一标识,pkm是无人机m的公钥,sig
ca
(
·
)是ca证书的签名,其由推导而来。之后,每个注册的无人机或路侧单元将认证广播给自动驾驶车联网络中的其他实体。每个实体接收其他实体的公钥,并通过使用ca的公钥解密签名来完成公钥验证。
47.基于上述无人机辅助的数据验证系统,提供了一种自动驾驶车联网络中无人机辅助的数据验证方法,如图2所示,具体步骤如下:
48.s100.在无人机感知单元100中,感知无人机感知自动驾驶车联网络中的路况信息、异常车辆信息,并根据感知信息的复杂度、重要性在路侧单元200上发布相应的验证任务;
49.s200.路侧单元200接收验证任务,招募验证无人机协作完成验证任务,以判断无人机感知数据是否正确;
50.s300.在感知数据验证单元中,验证无人机在收到验证任务之后,首先验证其格式,然后根据验证算法对感知数据进行验证;
51.s400.路侧单元200接收和汇总验证无人机反馈的验证结果,分析以得到无人机感知数据的最终验证结果。并将最终验证结果通过a2g信道反馈给感知无人机;
52.s500.在数据存储单元400中,路侧单元200负责将感知数据、验证结果等信息上传至数据存储单元400。
53.进一步,结合图3,步骤s200有如下步骤:
54.s210.路侧单元200接收验证任务,并将验证任务添加到任务面板中;
55.任务面板中的任务包含四种状态,已完成、正在处理、待定和重新确认。
56.s220.路侧单元200之间实时通信以同步更新任务面板,供各处的验证无人机查阅;
57.每个路侧单元的任务面板是相同的。但是,只有收到感知无人机上传的验证任务的路侧单元实际管理和负责此验证任务。
58.s230.验证无人机查阅任务面板,向路侧单元请求验证任务;
59.验证无人机根据验证任务类型、验证奖励和验证时间(time-to-live,ttl)从任务面板请求验证任务。特别地,验证无人机可以通过附近的路侧单元请求由远处路侧单元管理的验证任务。
60.s240.路侧单元200在确认验证无人机的身份和验证任务的状态之后,向请求任务的无人机发放验证任务。
61.路侧单元200首先确认验证无人机的身份,然后检查它们的信誉是否达到规定的阈值,信誉未达阈值的无人机将无法接收验证任务。然后,路侧单元检查验证无人机要接收的验证任务的状态,如果状态为待定或重新确认,则允许验证无人机加入验证任务的验证过程。之后,路侧单元将连接到验证无人机,并将加密的验证任务包发送到验证无人机。验证任务包的格式为:
[0062][0063]
其中,h(info
sensor
)是对数据包唯一标识符作哈希运算后的结果,info
sensor
表示感知的信息,payv表示该验证无人机完成任务的奖励。
[0064]
为便于验证无人机选择与其能力相匹配的验证任务,考虑到验证任务在计算要求和重要性上的不同,我们将验证任务的难度划分为不同的层次。对于验证任务u,其验证难度θu满足θu∈(0,1)。主要从客观和主观两个方面对验证无人机的信誉进行评价。
[0065]
从客观评价的角度看,较小的验证时间既保证了时效性,又提高了传输速率。对于时隙t 时的验证无人机v来说,其平均验证时间可以表示为:
[0066][0067]
其中,nv是验证无人机v参加验证的次数,θi是第i个验证任务的验证难度,ti是第i个验证任务的验证时间。为了激励验证无人机选择符合其计算能力的验证任务,用验证无人机的验证时间与总验证平均时间的比率来衡量验证无人机的能力:
[0068][0069]
其中,ηv(t)∈(0,1),v是验证无人机的总数量。该方程表明,如果验证无人机完成任务所花费的时间越少,则ηv(t)将越大。
[0070]
从主观评价的角度来看,主要考虑了任务验证过程中验证无人机的行为以及验证结果。对于验证任务v,有n
cr
个验证无人机参与验证。同一组中验证无人机可以根据组员的行为相互评估。因此,验证无人机v的合作评价分数crv可以表示为:
[0071][0072]
其中,crj∈{0,1},表示验证无人机j对验证无人机v的行为评估,crj=1表示验证无人机j认可验证无人机v的行为,crj=0表示验证无人机j认为验证无人机v在任务验证过程中存在合谋攻击,或者恶意增加验证时间等行为。验证无人机的验证结果由管理验证任务的路侧单元进行评估:
[0073][0074]
其中,ruk∈{0,1},表示路侧单元k对验证结果的评估分数。ruk=1表示验证正确,而ruk=0表示验证错误。因此,从客观和主观两个方面考虑无人机在整个验证过程中的验证行为,验证无人机v在时隙t的最终信誉值可以表示为:
[0075]rv
(t)=αηv β
·
(χcrv ωruv)
[0076]
其中,α和β是主观调节因子,满足α β=1。χ和ω是评价权重,满足χ ω=1。信誉会影响验证无人机的报酬,过低的信誉还会被系统评定为恶意验证无人机,拒绝其请求验证任务。因此,验证无人机应该做积极有效的行为来尽量提高自己的信誉。感知无人机发布的验证任务所需招募的验证无人机数量与其自身的信誉有关,需满足其中,rv是验证无人机v的信誉,是感知无人机s的信誉,满足:
[0077][0078]
其中,fs>0,表示感知无人机发布的验证任务的重要性,是感知无人机s发布的验证任务的ttl,ε是调节因子。
[0079]
为了实现信誉管理和感知数据可追溯,引入了区块链赋能的存储机制。无人机感知的数据具有机密性的特点,如果传感数据被恶意利用或窃取,将出现隐私数据泄露与数据滥用问题。因此,区块链仅面向有限数量的参与者,即联盟区块链类型。同时,为了节省计算资源,用一种信用增强型委托权益证明共识(credit-enhanced delegated proof of stake,ced)联盟区块链来进行信誉管理。信用增强型委托权益证明共识联盟链由在证书机构注册的路侧单元维护和管理。路侧单元在证书机构注册时,需要为公众监督下的账户支付押金才能成为区块链中的合法实体。
[0080]
进一步,结合图4,步骤s500还包括以下步骤:
[0081]
s510.路侧单元将感知数据和验证结果等信息打包为一个验证任务包,广播给其他路侧单元;
[0082]
s520.所有合法注册过的路侧单元和无人机投票选出一个路侧单元作为超级节点,来负责一段时间内的数据整合存储工作。
[0083]
路侧单元的行为分为诚实和恶意两类,由当前时隙的超级节点评估。一般来说,不同时间的行为对区块链的影响是不同的。因此,引入变量t
recent
来区分路侧单元的过去和现在的行为。当t<t
recent,
则这些行为是过去行为,否则就是当前行为。因此,对路侧单元k的行为评分可以定义为:
[0084][0085][0086]
其中,ξ和σ为时效性权重,满足ξ σ=1。分别为过去的诚实行为数、当前的诚实行为数、过去的恶意行为数,当前的恶意行为数。因此,路侧单元k的信用评分为:
[0087][0088]
其中,θ和τ为信任权重。θ越小意味着对信用系统中恶意行为的容忍度越低。
[0089]
每个无人机(感知或验证无人机)都可以参与超级节点的投票过程,选择l个超级节点在 l个时隙内依次进行块生成、广播、验证过程和块管理。此外,超级节点还将完成信誉计算、信誉更新和共识的过程。无人机的投票权重取决于其信誉值,信誉越高的无人机投票权越大。在无人机投票选出前2l个节点后,上一轮的超级节点将评定并检查新当选节点的信用评分。如果其信用评分满足credit<∈,则这些节点将被移除,而剩余的子节点按投票排名顺序成为新的超级节点。如果超级节点未能及时打包区块或针对区块链做出恶意行为,无人机也可以将其投票淘汰。作为惩罚,被移除的超级节点的押金将被区块链系统没收。
[0090]
s530.超级节点收集和整理各地路侧单元广播的验证任务包,计算并更新无人机的信誉和路侧单元的信用,并将验证任务包,信誉和信用整合打包为一个待验证区块,并广播给所有的路侧单元验证。
[0091]
超级节点将所有无人机的信誉值打包到一个事务中,该事务充当块中的第一个事务。类似地,路侧单元的信用评分也将被打包到事务中,该事务作为块中的第二个交易。最后,将事务池中的验证任务事务添加到块中。当区块打包成功后,超级节点将向全网广播,并等待区块验证。
[0092]
当超级节点广播待验证区块时,收到区块的路侧单元会将其与其事务池中的事务进行比较,并删除重复的事务。超级节点在当前时隙更新无人机的信誉和路侧单元的信用。在更新之前,超级节点需要从前一个区块中提取信誉值和信用评分。之后,超级节点收集每个路侧单元广播的事务,并在验证其格式后将其添加到自己的事务池中。当轮到该超级节点管理块时,超级节点将提取事务池中的所有事务,然后计算和更新无人机的信誉,而路侧单元的行为由该超级节点评估。同时,超级节点根据信用计算公式和路侧单元以前的信用
值完成对信用评分的计算和更新。
[0093]
s540.超级节点在收到超过2/3的路侧单元认可后,将这一区块加入到区块链末尾,并链上前一个区块,以完成数据存储。
[0094]
上述实施例自动驾驶车联网络中无人机辅助的数据验证系统及方法,系统包括无人机感知单元、路侧单元、感知数据验证单元,数据存储单元;所述无人机感知单元通过空对地通信(air to ground,a2g)方式与路侧单元连接;所述感知数据验证单元通过a2g方式与路侧单元相连;所述数据存储单元与路侧单元相连。上述实施例方法包括根据感知无人机的信誉,招募相应数量的验证无人机对感知数据验证;根据验证时间、协作评价、和验证结果建立验证无人机的信誉度;在联盟区块链根据提出的信用增强的委托权益证明进行共识,完成感知数据、信誉度和验证信息的存储,实现数据可追溯。
[0095]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。